Downloaded 27 times

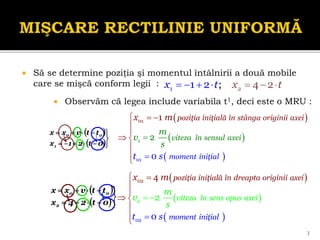
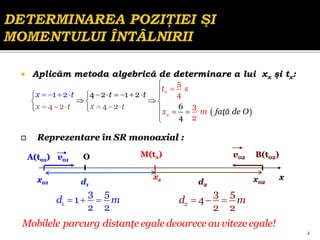
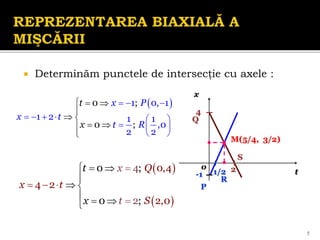
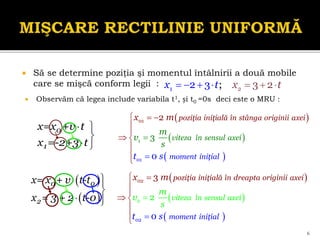
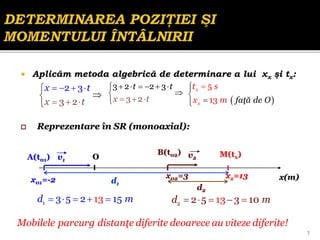
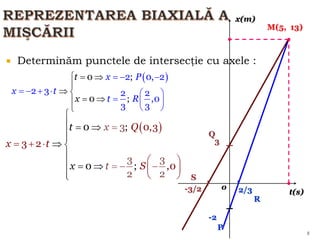
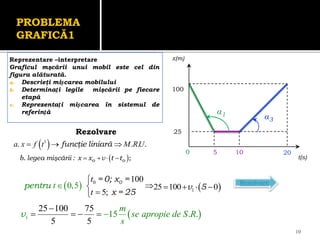
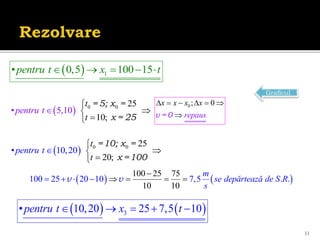
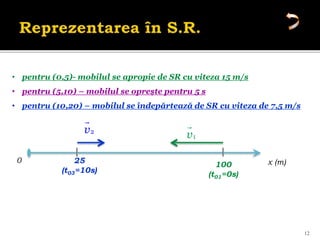
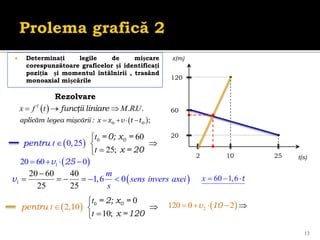
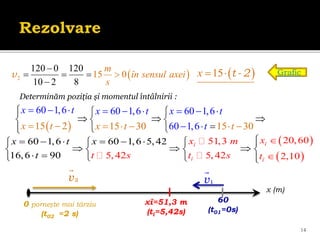

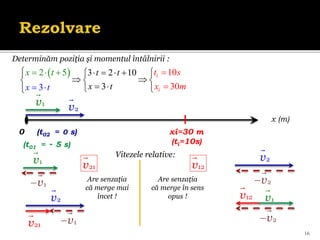
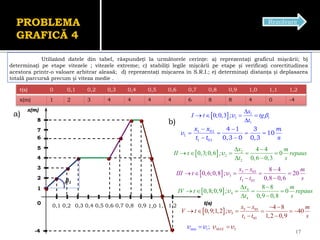
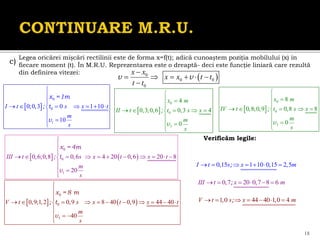
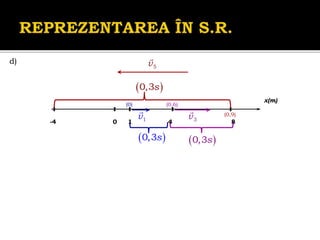
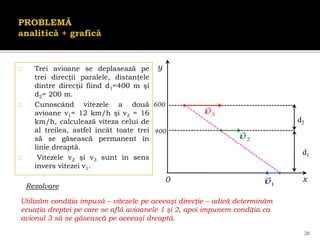
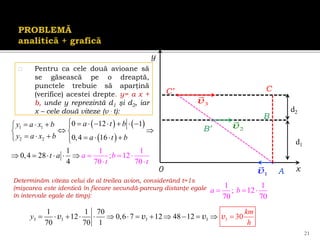
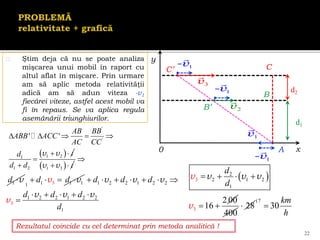
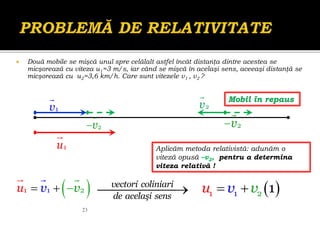
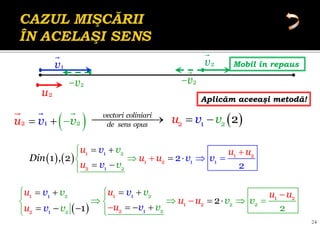
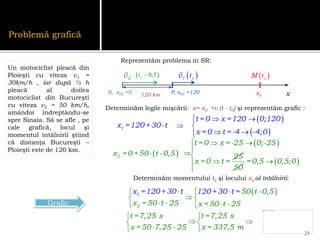
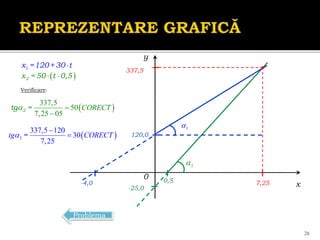
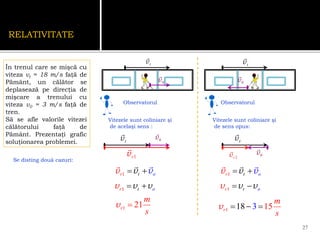
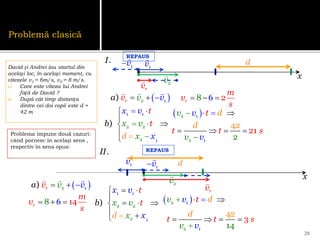
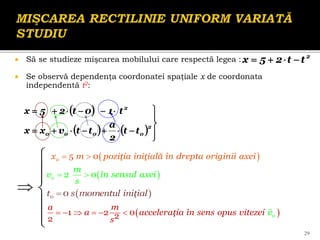
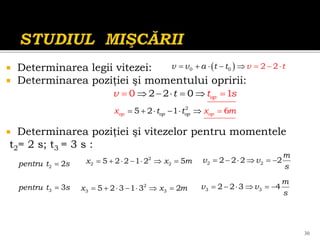
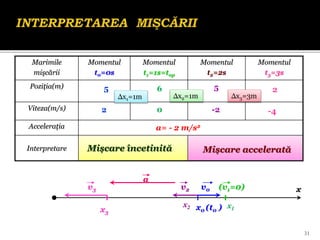
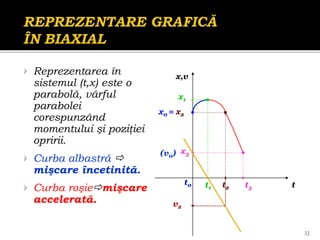
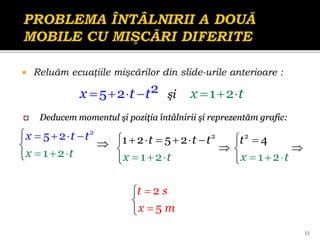
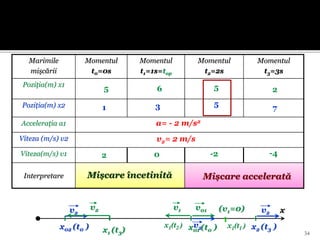
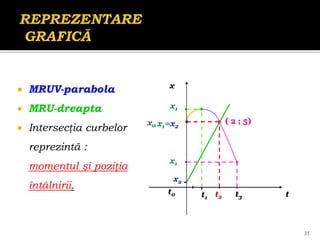
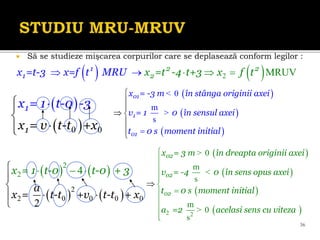
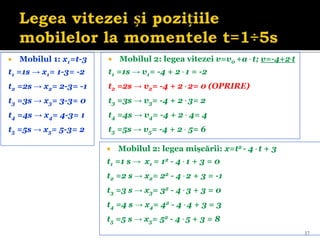
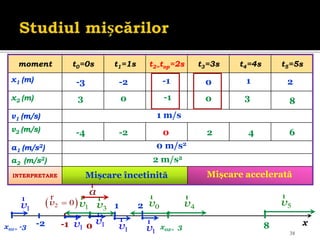
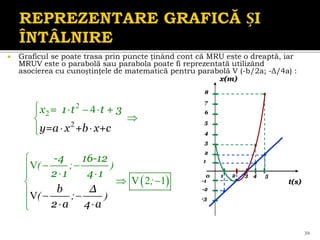
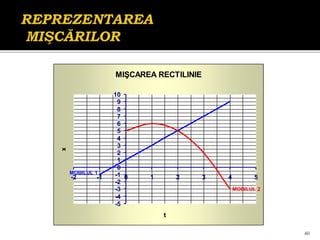
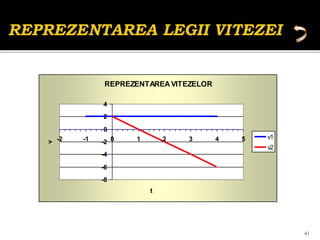
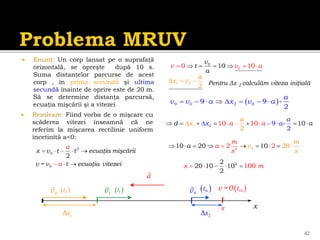

Documentul se concentrează pe mișcarea rectilinie, variată și uniformă, discutând studii și probleme asociate cu ecuațiile mișcării pentru diferite mobile. Se analizează legile mișcării prin grafice, metoda algebrică și se determină momentele și pozițiile întâlnirii mobilelor. Exemplele includ cazuri practice, cum ar fi întâlniri între bicicliști și interpretarea graficelor de mișcare.


















































































