Bahadir K. Gunturk2
Image Enhancement
The objective of image enhancement is to process an
image so that the result is more suitable than the original
image for a specific application.
There are two main approaches:
Image enhancement in spatial domain: Direct
manipulation of pixels in an image
Point processing: Change pixel intensities
Spatial filtering
Image enhancement in frequency domain: Modifying the
Fourier transform of an image
3.
Bahadir K. Gunturk3
Image Enhancement by Point Processing
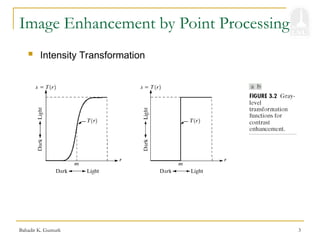
Intensity Transformation
4.
Bahadir K. Gunturk4
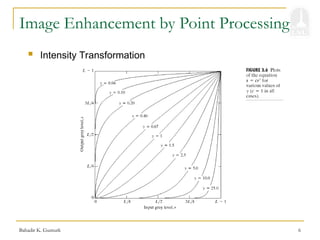
Image Enhancement by Point Processing
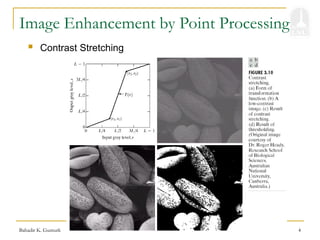
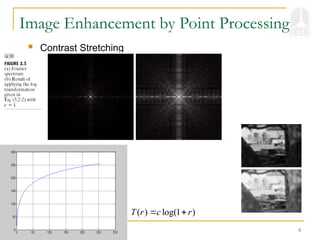
Contrast Stretching
5.
Bahadir K. Gunturk5
Image Enhancement by Point Processing
Contrast Stretching
( ) log(1 )
T r c r
6.
Bahadir K. Gunturk6
Image Enhancement by Point Processing
Intensity Transformation
7.
Bahadir K. Gunturk7
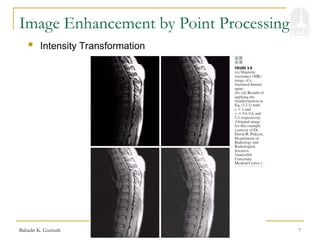
Image Enhancement by Point Processing
Intensity Transformation
8.
Bahadir K. Gunturk8
Image Enhancement by Point Processing
Intensity Transformation
9.
Bahadir K. Gunturk9
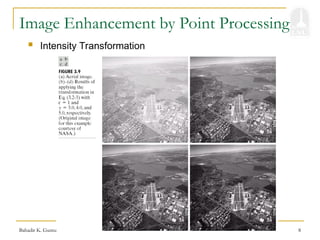
Image Enhancement by Point Processing
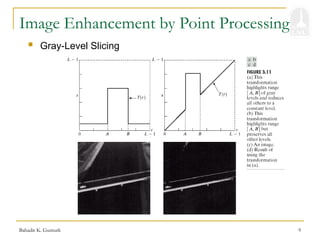
Gray-Level Slicing
10.
Bahadir K. Gunturk12
Image Enhancement by Point Processing
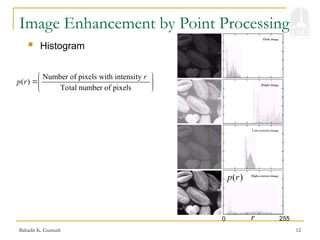
Histogram
0 255
Number of pixels with intensity
( )
Total number of pixels
r
p r
( )
p r
r
11.
Bahadir K. Gunturk13
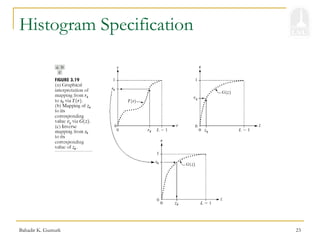
Histogram Specification
( )
s T r
Intensity mapping
Assume
T(r) is single-valued and monotonically increasing.
The original and transformed intensities can be
characterized by their probability density functions (PDFs)
0 ( ) 1 and 0 1
T r r
( )
r
p r
( )
s
p s
12.
Bahadir K. Gunturk14
Histogram Specification
1
( )
( ) ( )
s r
r T s
dr
p s p r
ds
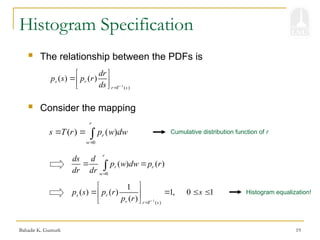
The relationship between the PDFs is
0
( ) ( )
r
r
w
s T r p w dw
0
( ) ( )
r
r r
w
ds d
p w dw p r
dr dr
Consider the mapping
Cumulative distribution function of r
1
( )
1
( ) ( ) 1, 0 1
( )
s r
r r T s
p s p r s
p r
Histogram equalization!
( ) ( ) 1
s r
p s ds p r dr
13.
Bahadir K. Gunturk15
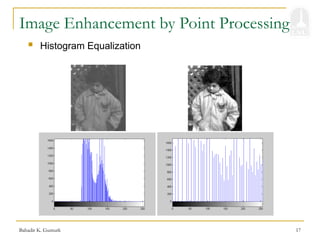
Image Enhancement by Point Processing
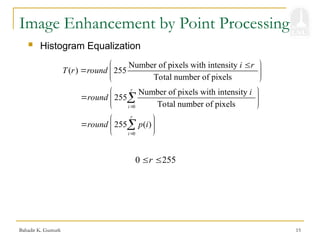
Histogram Equalization
Number of pixels with intensity
( ) 255
Total number of pixels
i r
T r round
0 255
r
0
255 ( )
r
i
round p i
0
Number of pixels with intensity
255
Total number of pixels
r
i
i
round
14.
Bahadir K. Gunturk16
Image Enhancement by Point Processing
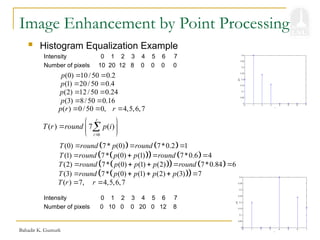
Histogram Equalization Example
Intensity 0 1 2 3 4 5 6 7
Number of pixels 10 20 12 8 0 0 0 0
Intensity 0 1 2 3 4 5 6 7
Number of pixels 0 10 0 0 20 0 12 8
(0) 10/50 0.2
p
(1) 20/50 0.4
p
(2) 12/50 0.24
p
(3) 8/50 0.16
p
( ) 0/50 0, 4,5,6,7
p r r
0
( ) 7 ( )
r
i
T r round p i
(0) 7* (0) 7*0.2 1
T round p round
(1) 7* (0) (1) 7*0.6 4
T round p p round
(2) 7* (0) (1) (2) 7*0.84 6
T round p p p round
(3) 7* (0) (1) (2) (3) 7
T round p p p p
( ) 7, 4,5,6,7
T r r
15.
Bahadir K. Gunturk17
Image Enhancement by Point Processing
Histogram Equalization
16.
Bahadir K. Gunturk18
Histogram Specification
( )
s T r
Intensity mapping
Assume
T(r) is single-valued and monotonically increasing.
The original and transformed intensities can be
characterized by their probability density functions (PDFs)
0 ( ) 1 and 0 1
T r r
( )
r
p r
( )
s
p s
17.
Bahadir K. Gunturk19
Histogram Specification
1
( )
( ) ( )
s r
r T s
dr
p s p r
ds
The relationship between the PDFs is
0
( ) ( )
r
r
w
s T r p w dw
0
( ) ( )
r
r r
w
ds d
p w dw p r
dr dr
Consider the mapping
Cumulative distribution function of r
1
( )
1
( ) ( ) 1, 0 1
( )
s r
r r T s
p s p r s
p r
Histogram equalization!
18.
Bahadir K. Gunturk20
Histogram Specification
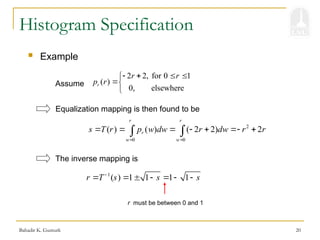
2 2, for 0 1
( )
0, elsewhere
r
r r
p r
Example
2
0 0
( ) ( ) ( 2 2) 2
r r
r
w w
s T r p w dw r dw r r
Assume
Equalization mapping is then found to be
1
( ) 1 1 1 1
r T s s s
The inverse mapping is
r must be between 0 and 1
19.
Bahadir K. Gunturk21
Histogram Specification
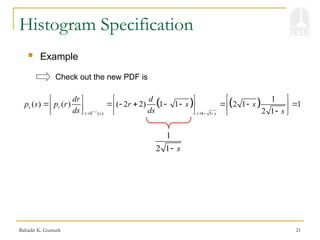
Example
Check out the new PDF is
1
2 1 s
1
( ) 1 1
1
( ) ( ) ( 2 2) 1 1 2 1 1
2 1
s r
r T s r s
dr d
p s p r r s s
ds ds s
20.
Bahadir K. Gunturk22
Histogram Specification
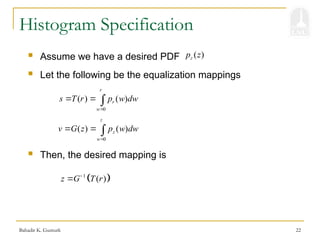
Assume we have a desired PDF
Let the following be the equalization mappings
( )
z
p z
0
( ) ( )
r
r
w
s T r p w dw
0
( ) ( )
z
z
w
v G z p w dw
Then, the desired mapping is
1
( )
z G T r
Bahadir K. Gunturk27
Local Histogram Processing
Histogram processing can be applied locally.
26.
Bahadir K. Gunturk28
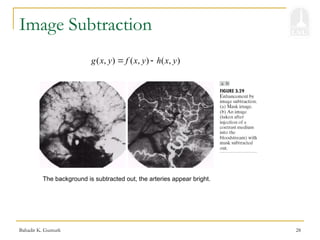
Image Subtraction
The background is subtracted out, the arteries appear bright.
( , ) ( , ) ( , )
g x y f x y h x y
27.
Bahadir K. Gunturk29
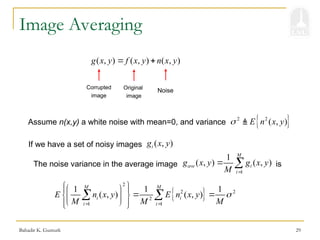
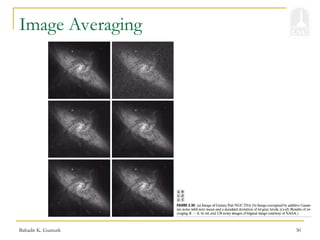
Image Averaging
( , ) ( , ) ( , )
g x y f x y n x y
Original
image
Noise
Corrupted
image
Assume n(x,y) a white noise with mean=0, and variance
2 2
( , )
E n x y
If we have a set of noisy images ( , )
i
g x y
The noise variance in the average image is
1
1
( , ) ( , )
M
ave i
i
g x y g x y
M
2
2 2
2
1 1
1 1 1
( , ) ( , )
M M
i i
i i
E n x y E n x y
M M M
Bahadir K. Gunturk33
Spatial Filtering
Median filters are nonlinear.
Median filtering reduces noise without blurring edges and
other sharp details.
Median filtering is particularly effective when the noise
pattern consists of strong, spikelike components. (Salt-and-
pepper noise.)
32.
Bahadir K. Gunturk34
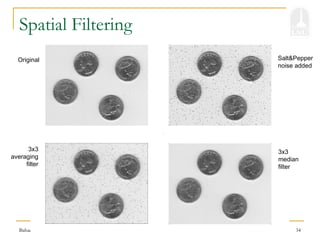
Spatial Filtering
Original
3x3
averaging
filter
Salt&Pepper
noise added
3x3
median
filter
Bahadir K. Gunturk36
Spatial Filtering
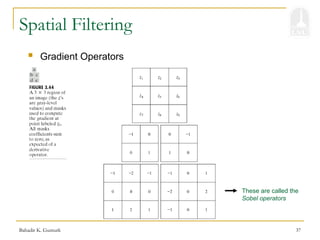
Gradient Operators
Averaging of pixels over a region tends to blur detail in an
image.
As averaging is analogous to integration, differentiation can
be expected to have the opposite effect and thus sharpen an
image.
Gradient operators (first-order derivatives) are commonly
used in image processing applications.
35.
Bahadir K. Gunturk37
Spatial Filtering
Gradient Operators
These are called the
Sobel operators
36.
Bahadir K. Gunturk38
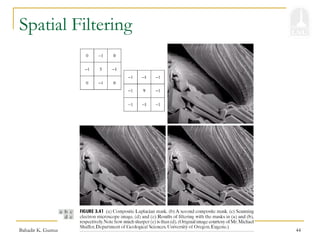
Spatial Filtering
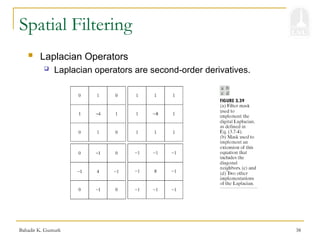
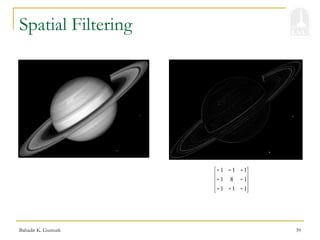
Laplacian Operators
Laplacian operators are second-order derivatives.
Bahadir K. Gunturk40
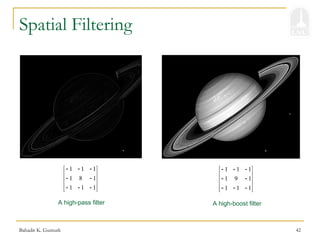
Spatial Filtering
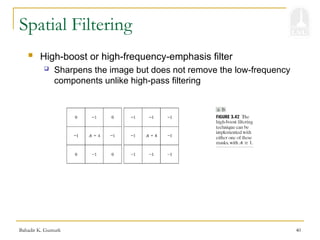
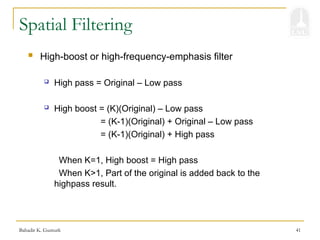
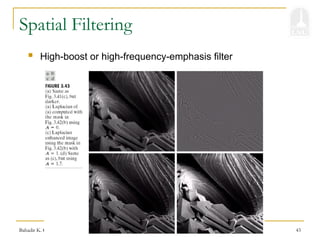
High-boost or high-frequency-emphasis filter
Sharpens the image but does not remove the low-frequency
components unlike high-pass filtering
39.
Bahadir K. Gunturk41
Spatial Filtering
High-boost or high-frequency-emphasis filter
High pass = Original – Low pass
High boost = (K)(Original) – Low pass
= (K-1)(Original) + Original – Low pass
= (K-1)(Original) + High pass
When K=1, High boost = High pass
When K>1, Part of the original is added back to the
highpass result.


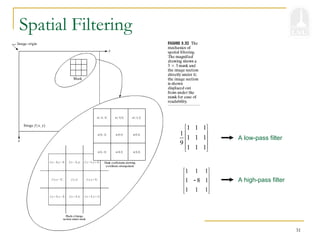
![Bahadir K. Gunturk 32
Spatial Filtering
Median Filter
10 20 10
25 10 75
90 85 100
Sort: (10 10 10 20 25 75 85 90 100)
100 100 100 100 10 10 10 10 10
Example
Original signal:
100 103 100 100 10 9 10 11 10
Noisy signal:
101 101 70 40 10 10 10
Filter by [ 1 1 1]/3:
100 100 100 10 10 10 10
Filter by 1x3
median filter:](https://image.slidesharecdn.com/imageenhancing-250611044416-c7812ede/85/IMAGE-PROCESSING-image-enhancing-ppt-30-320.jpg)