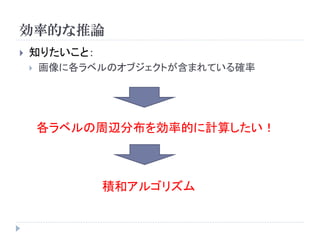
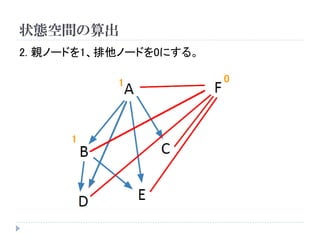
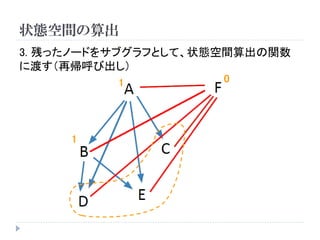
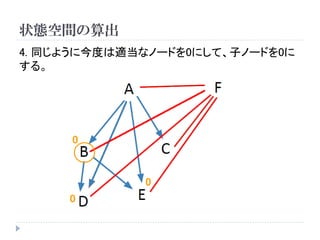
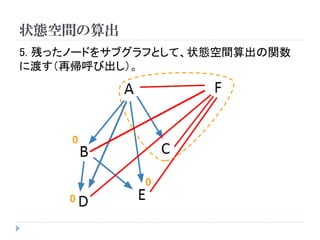
紹介する研究
“Large-Scale ObjectClassification Using Label Relation Graphs”
JiaDeng*1,2, JNanDing*2, YangqingJia*2, Andrea Frome*2, Kevin Murphy*2, SamyBengio*2, Yuan Li*2, HartmutNeven*2, and HartwigAdam*2
*1 University of Michigan
*2 Google
Best Paper Award
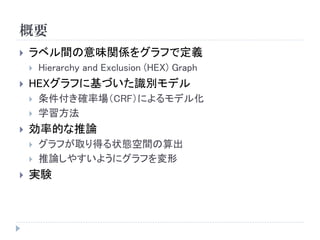
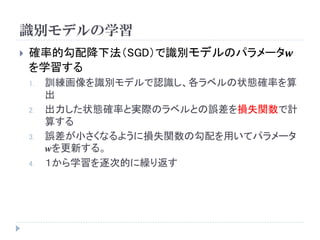
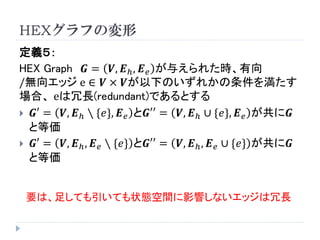
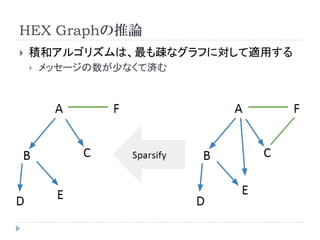
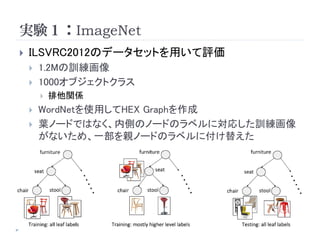
![HEXグラフによる識別モデル
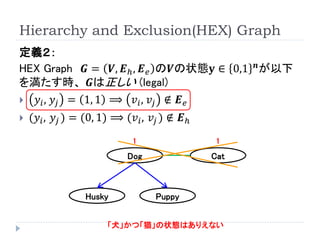
푃풚푥 = 푖 푒푓푖푥;풘[푦푖=1] (푣푖,푣푗)∈푬ℎ (푦푖,푦푗)≠(0,1) (푣푖,푣푗)∈푬푒 (푦푖,푦푗)≠(1,1)
(1)
Dog
Cat
Husky
Puppy
条件付き確率場(CRF)](https://image.slidesharecdn.com/hexgraph-141205213701-conversion-gate01/85/Large-Scale-Object-Classification-Using-Label-Relation-Graphs-15-320.jpg)
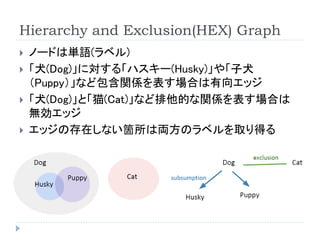
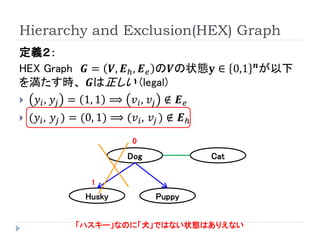
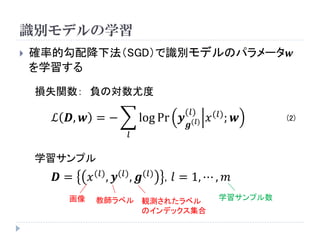
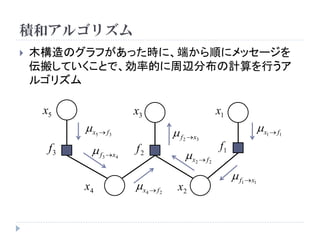
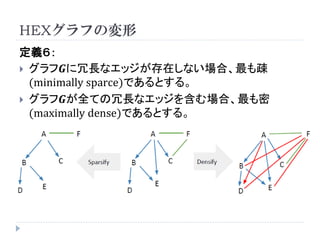
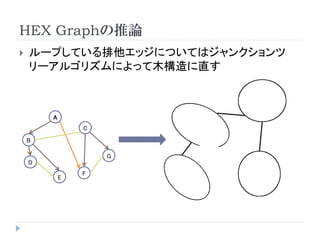
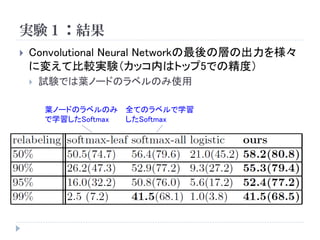
![HEXグラフによる識別モデル
푃풚푥 = 푖 푒푓푖푥;풘[푦푖=1] (푣푖,푣푗)∈푬ℎ (푦푖,푦푗)≠(0,1) (푣푖,푣푗)∈푬푒 (푦푖,푦푗)≠(1,1)
ある入力画像푥のラベルが状態풚を とる(正規化してない)確率
(1)
状態の例:
풚=0,1,0,1
Dog
Cat
Husky
Puppy
条件付き確率場(CRF)
Cat
Dog
Husky
Puppy](https://image.slidesharecdn.com/hexgraph-141205213701-conversion-gate01/85/Large-Scale-Object-Classification-Using-Label-Relation-Graphs-16-320.jpg)
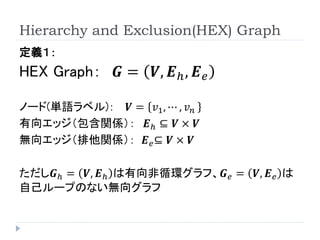
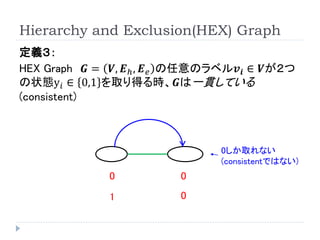
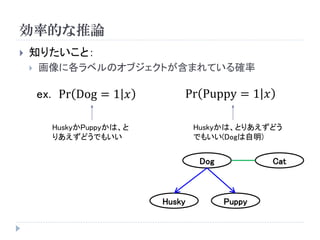
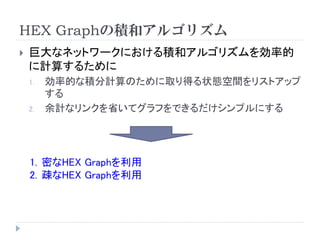
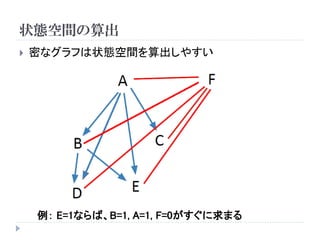
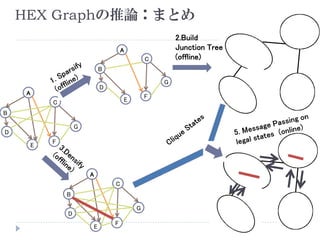
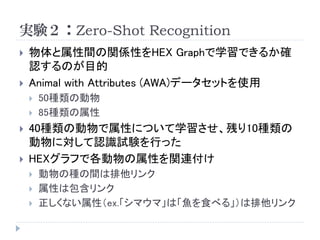
![HEXグラフによる識別モデル
푃풚푥 = 푖 푒푓푖푥;풘[푦푖=1] (푣푖,푣푗)∈푬ℎ (푦푖,푦푗)≠(0,1) (푣푖,푣푗)∈푬푒 (푦푖,푦푗)≠(1,1)
(1)
Dog
Cat
Husky
Puppy
条件付き確率場(CRF)
ラベルiの画像識別器
(ex. DeepCNN)
i番目のラベルが1になる (正規化されていない)確率
識別器のパラメータ](https://image.slidesharecdn.com/hexgraph-141205213701-conversion-gate01/85/Large-Scale-Object-Classification-Using-Label-Relation-Graphs-17-320.jpg)
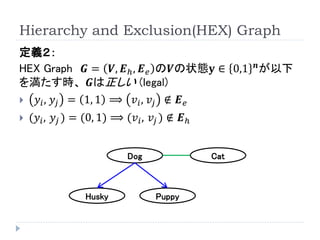
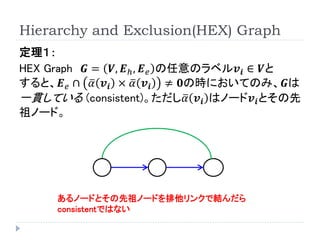
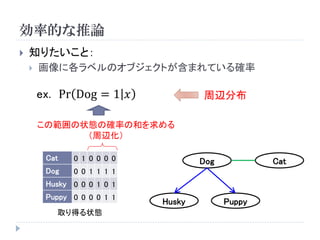
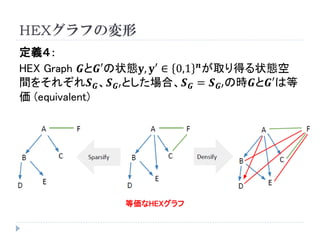
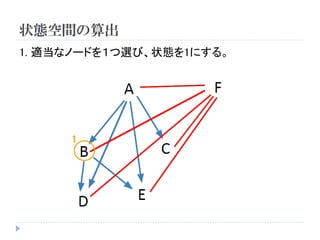
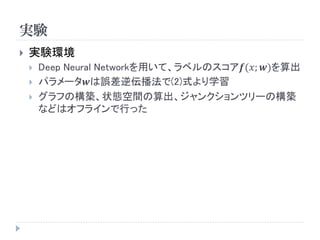
![HEXグラフによる識別モデル
푃풚푥 = 푖 푒푓푖푥;풘[푦푖=1] (푣푖,푣푗)∈푬ℎ (푦푖,푦푗)≠(0,1) (푣푖,푣푗)∈푬푒 (푦푖,푦푗)≠(1,1)
(1)
Dog
Cat
Husky
Puppy
条件付き確率場(CRF)
このケースが含まれる풚は 0になる
0
1](https://image.slidesharecdn.com/hexgraph-141205213701-conversion-gate01/85/Large-Scale-Object-Classification-Using-Label-Relation-Graphs-18-320.jpg)
![HEXグラフによる識別モデル
푃풚푥 = 푖 푒푓푖푥;풘[푦푖=1] (푣푖,푣푗)∈푬ℎ (푦푖,푦푗)≠(0,1) (푣푖,푣푗)∈푬푒 (푦푖,푦푗)≠(1,1)
(1)
Dog
Cat
Husky
Puppy
条件付き確率場(CRF)
このケースが含まれる풚は 0になる
1
1](https://image.slidesharecdn.com/hexgraph-141205213701-conversion-gate01/85/Large-Scale-Object-Classification-Using-Label-Relation-Graphs-19-320.jpg)
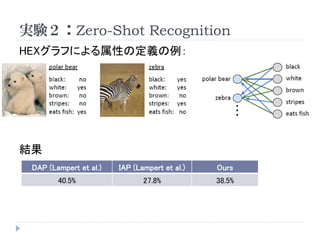
![HEXグラフによる識別モデル
푃풚푥 = 푖 푒푓푖푥;풘[푦푖=1] (푣푖,푣푗)∈푬ℎ (푦푖,푦푗)≠(0,1) (푣푖,푣푗)∈푬푒 (푦푖,푦푗)≠(1,1)
(1)
Dog
Cat
Husky
Puppy
条件付き確率場(CRF)
1
0
0
1
例:풚=0,1,0,1
푃풚푥 =exp푓푑표푔푥;풘+푓푝푢푝푝푦푥;풘](https://image.slidesharecdn.com/hexgraph-141205213701-conversion-gate01/85/Large-Scale-Object-Classification-Using-Label-Relation-Graphs-20-320.jpg)
![例1:排他リンクだけの場合
푃풚푥 = 푖 푒푓푖푥;풘[푦푖=1] (푣푖,푣푗)∈푬ℎ (푦푖,푦푗)≠(0,1) (푣푖,푣푗)∈푬푒 (푦푖,푦푗)≠(1,1)
条件付き確率場(CRF)
푃풚푥= 11+ 푗푒푓푗 푖 푒푓푖푥;풘[푦푖=1]
Softmax関数](https://image.slidesharecdn.com/hexgraph-141205213701-conversion-gate01/85/Large-Scale-Object-Classification-Using-Label-Relation-Graphs-21-320.jpg)
![例2:リンクがない場合
푃풚푥 = 푖 푒푓푖푥;풘[푦푖=1] (푣푖,푣푗)∈푬ℎ (푦푖,푦푗)≠(0,1) (푣푖,푣푗)∈푬푒 (푦푖,푦푗)≠(1,1)
条件付き確率場(CRF)
푃풚푥= 푖 11+푒−푓푖푥;풘[푦푖=1]
Logistic関数 の積](https://image.slidesharecdn.com/hexgraph-141205213701-conversion-gate01/85/Large-Scale-Object-Classification-Using-Label-Relation-Graphs-22-320.jpg)



![[CV勉強会]Active Object Localization with Deep Reinfocement Learning](https://cdn.slidesharecdn.com/ss_thumbnails/20160204objectdetectionrl-160206032348-thumbnail.jpg?width=640&height=640&fit=bounds)



















![[DL輪読会]SoftTriple Loss: Deep Metric Learning Without Triplet Sampling (ICCV2019)](https://cdn.slidesharecdn.com/ss_thumbnails/yokota20190920dlhack-190920011134-thumbnail.jpg?width=640&height=640&fit=bounds)










![[G4]image deblurring, seeing the invisible](https://cdn.slidesharecdn.com/ss_thumbnails/g4imagedeblurringseeingtheinvisible-120919212040-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)