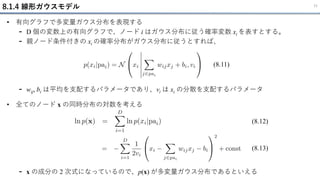
• 全てのノード xの同時分布の対数を考える
- x の成分の 2 次式になっているので、p(x) が多変量ガウス分布であるといえる
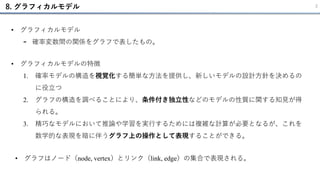
8.1.4 線形ガウスモデル 11
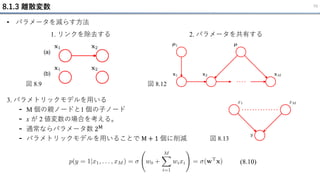
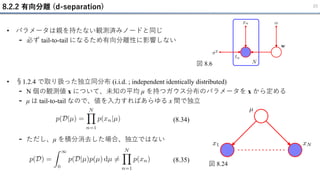
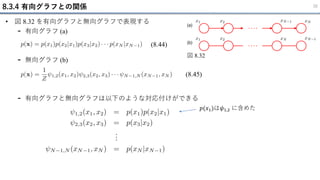
• 有向グラフで多変量ガウス分布を表現する
- D 個の変数上の有向グラフで、ノード i はガウス分布に従う確率変数 xi を表すとする。
- 親ノード条件付きの xi の確率分布がガウス分布に従うとすれば、
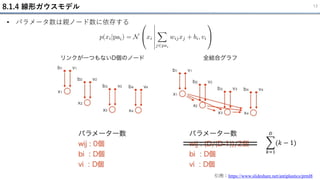
- wij, bi は平均を支配するパラメータであり、vi は xi の分散を支配するパラメータ
(8.11)
(8.12)
(8.13)
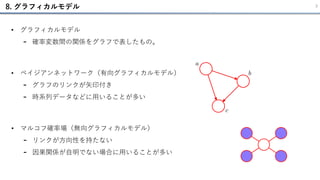
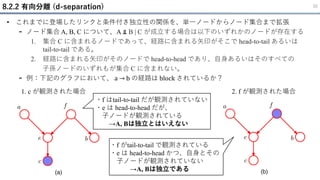
8.2.2 有向分離 (d-separation)24
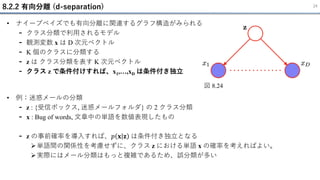
• ナイーブベイズでも有向分離に関連するグラフ構造がみられる
- クラス分類で利用されるモデル
- 観測変数 x は D 次元ベクトル
- K 個のクラスに分類する
- z は クラス分類を表す K 次元ベクトル
- クラス z で条件付けすれば、x1,…,xD は条件付き独立
図 8.24
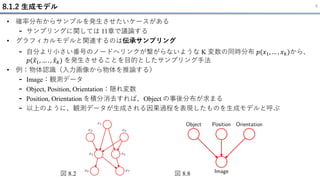
• 例:迷惑メールの分類
- z : {受信ボックス, 迷惑メールフォルダ} の 2 クラス分類
- x : Bug of words, 文章中の単語を数値表現したもの
- z の事前確率を導入すれば、𝑝 𝐱 𝐳 は条件付き独立となる
➢単語間の関係性を考慮せずに、クラス z における単語 x の確率を考えればよい。
➢実際にはメール分類はもっと複雑であるため、誤分類が多い
25.
8.2.2 有向分離 (d-separation)25
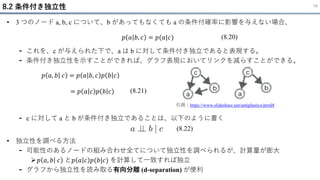
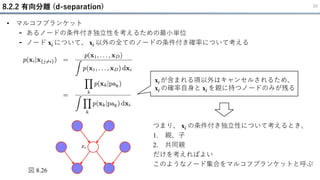
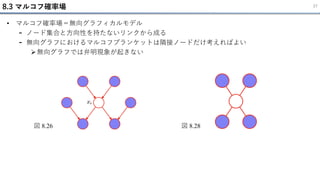
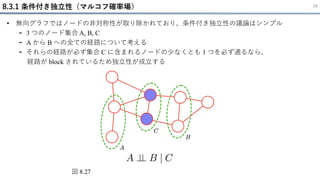
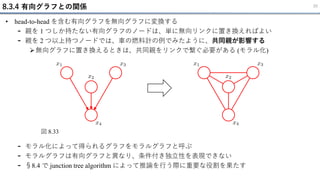
• マルコフブランケット
- あるノードの条件付き独立性を考えるための最小単位
- ノード xi について、 xi 以外の全てのノードの条件付き確率について考える
図 8.26
つまり、 xi の条件付き独立性について考えるとき、
1. 親、子
2. 共同親
だけを考えればよい
このようなノード集合をマルコフブランケットと呼ぶ
xi が含まれる項以外はキャンセルされるため、
xi の確率自身と xi を親に持つノードのみが残る

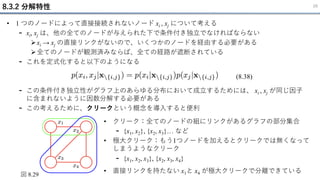
![8.1.4 線形ガウスモデル 12
• 平均0、分散1 のガウス確率変数 𝜖𝑖 を導入すれば、
- この式を用いると、期待値と分散は以下のように書ける
- 数字の小さいノードから順番に、再帰的に期待値と分散が求めることが可能
(8.14) ( 𝜖𝑖 =
𝑥𝑖−𝜇
𝜎
)
(8.15)
(8.16)
xj, E[xj] に(8.14), (8.15) を適用](https://image.slidesharecdn.com/prml8nakamura-230305053533-f047db81/85/PRML-Chapter-8-8-0-8-3-12-320.jpg)









![[PRML] パターン認識と機械学習(第1章:序論)](https://cdn.slidesharecdn.com/ss_thumbnails/prmlchapter1-170903070406-thumbnail.jpg?width=640&height=640&fit=bounds)






































