Downloaded 345 times
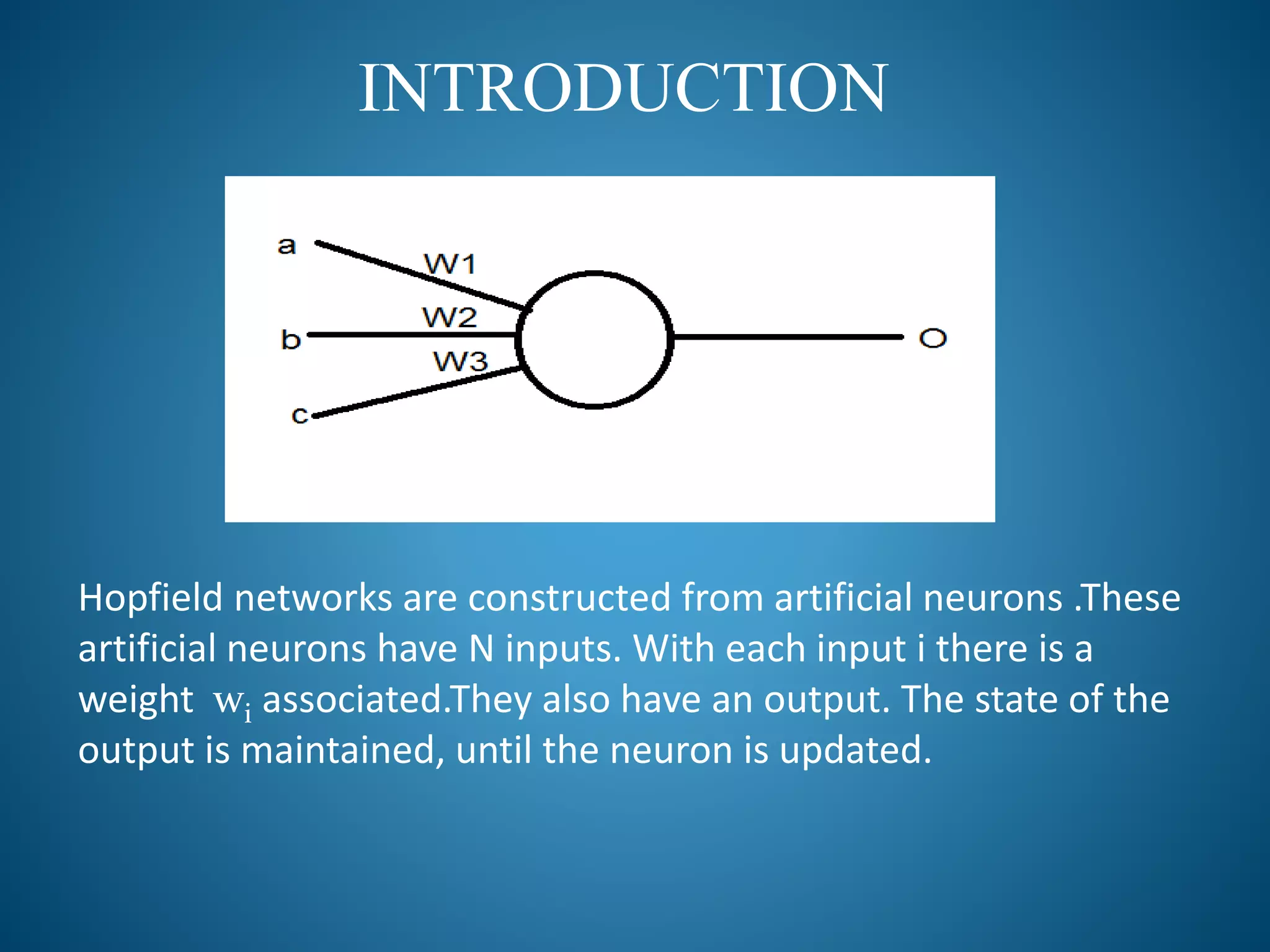
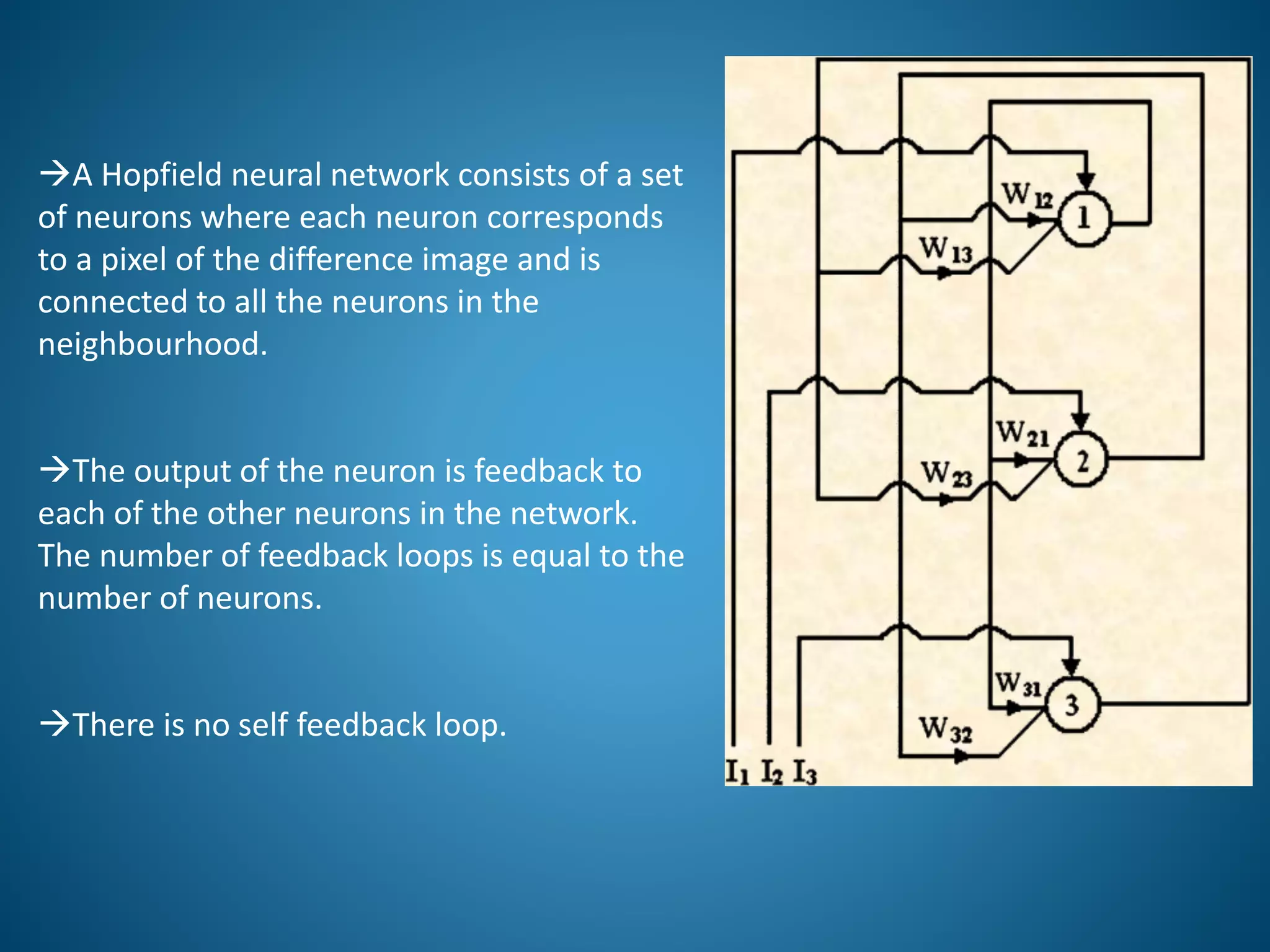
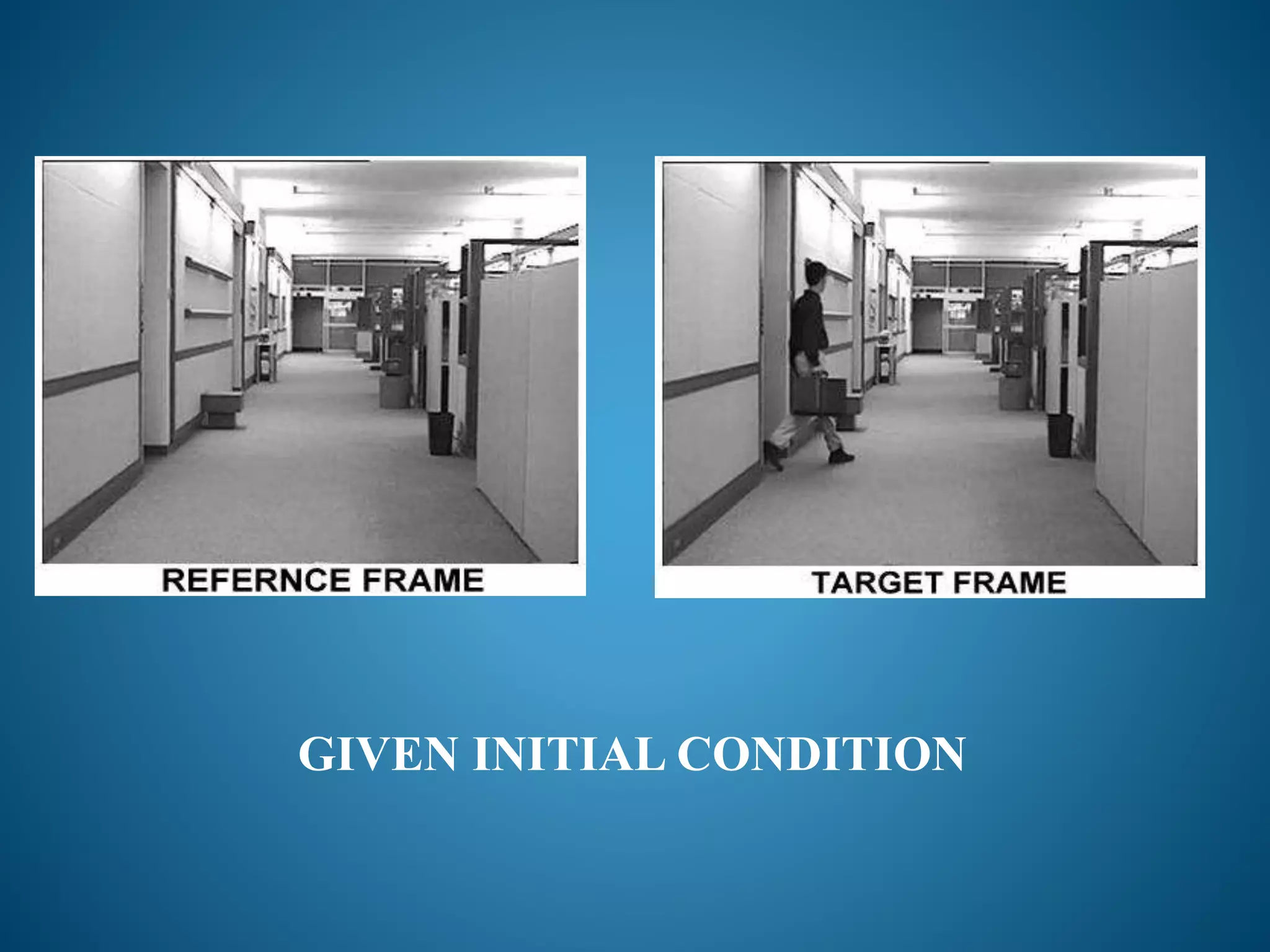
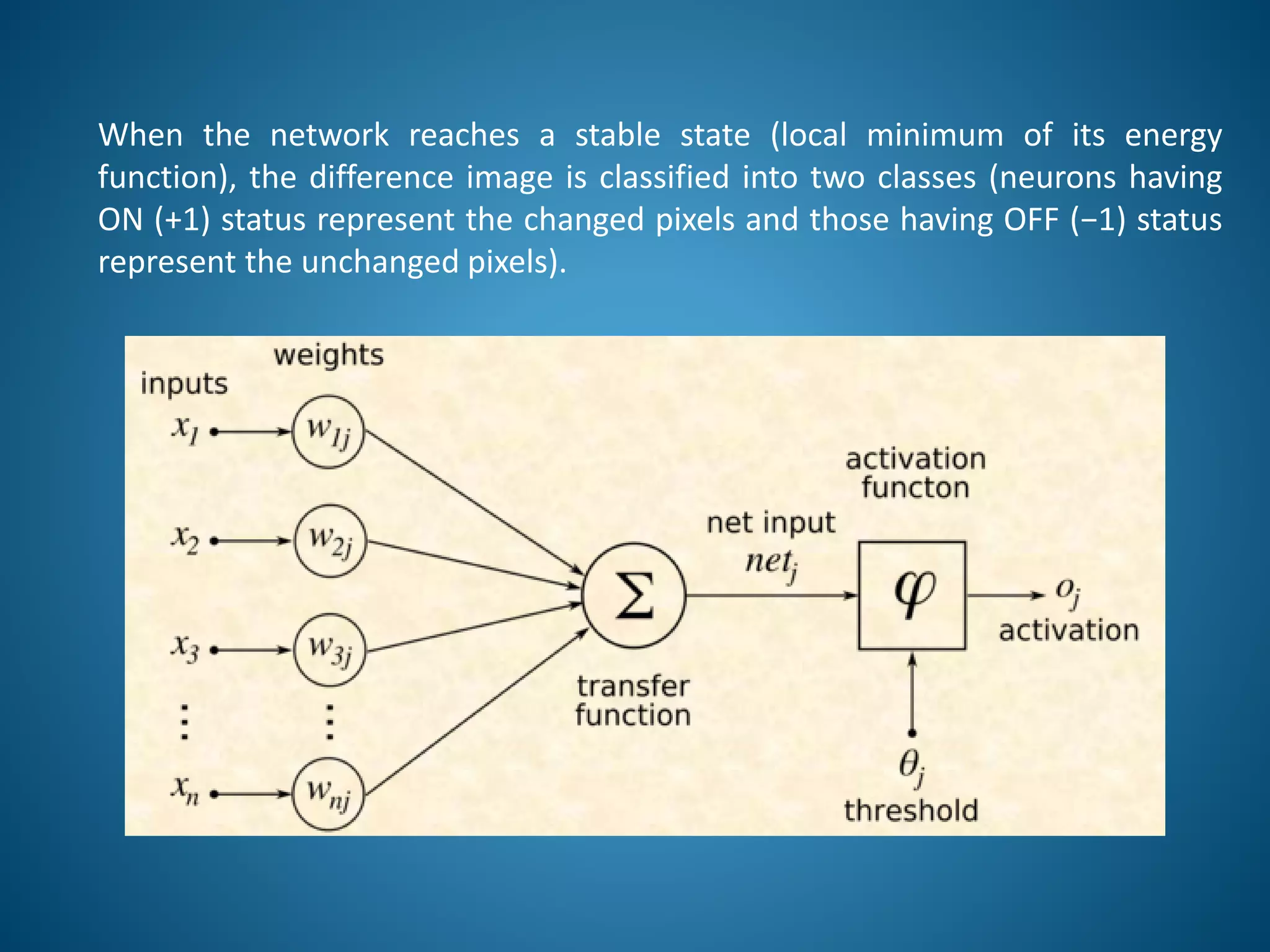
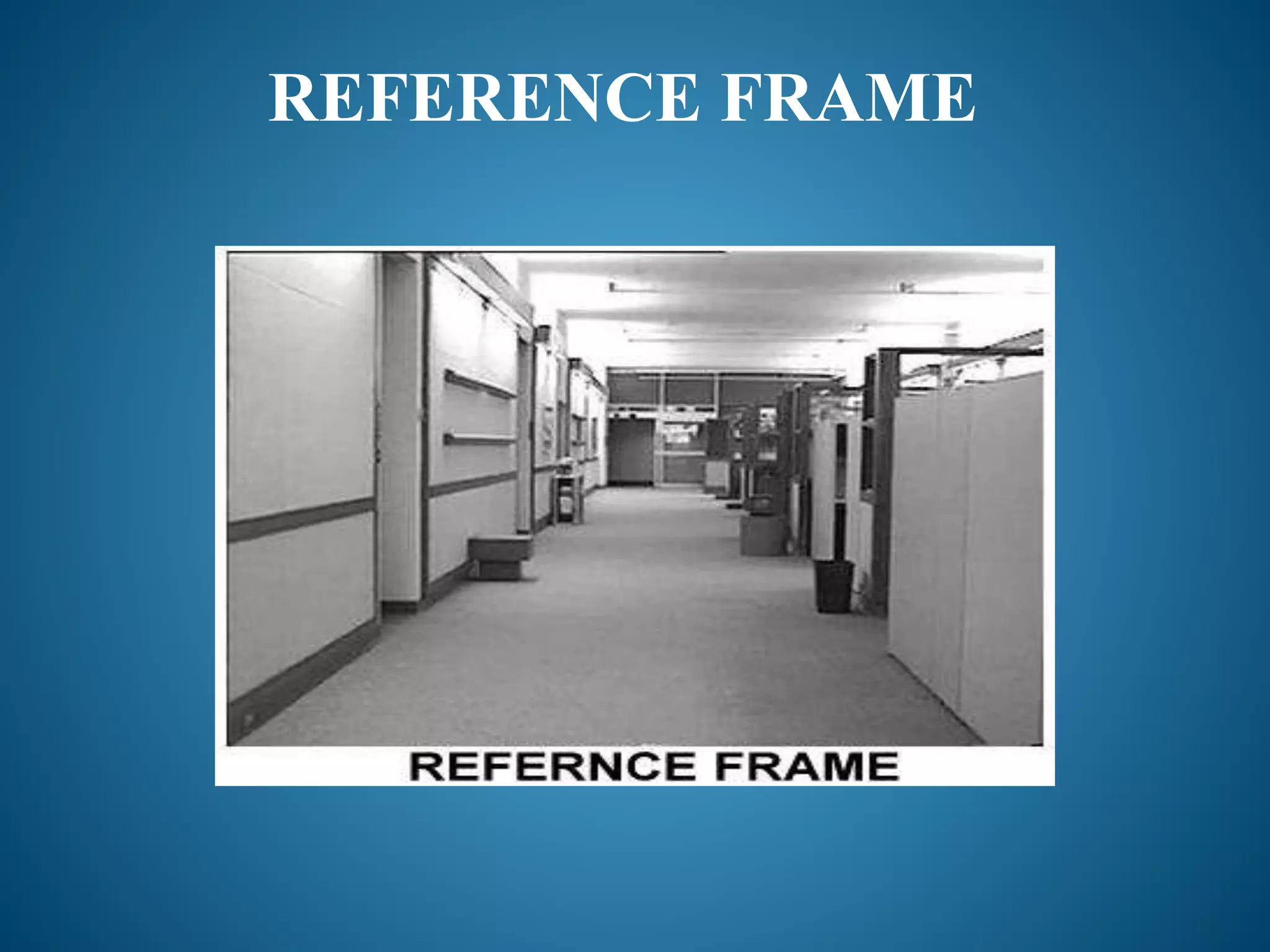
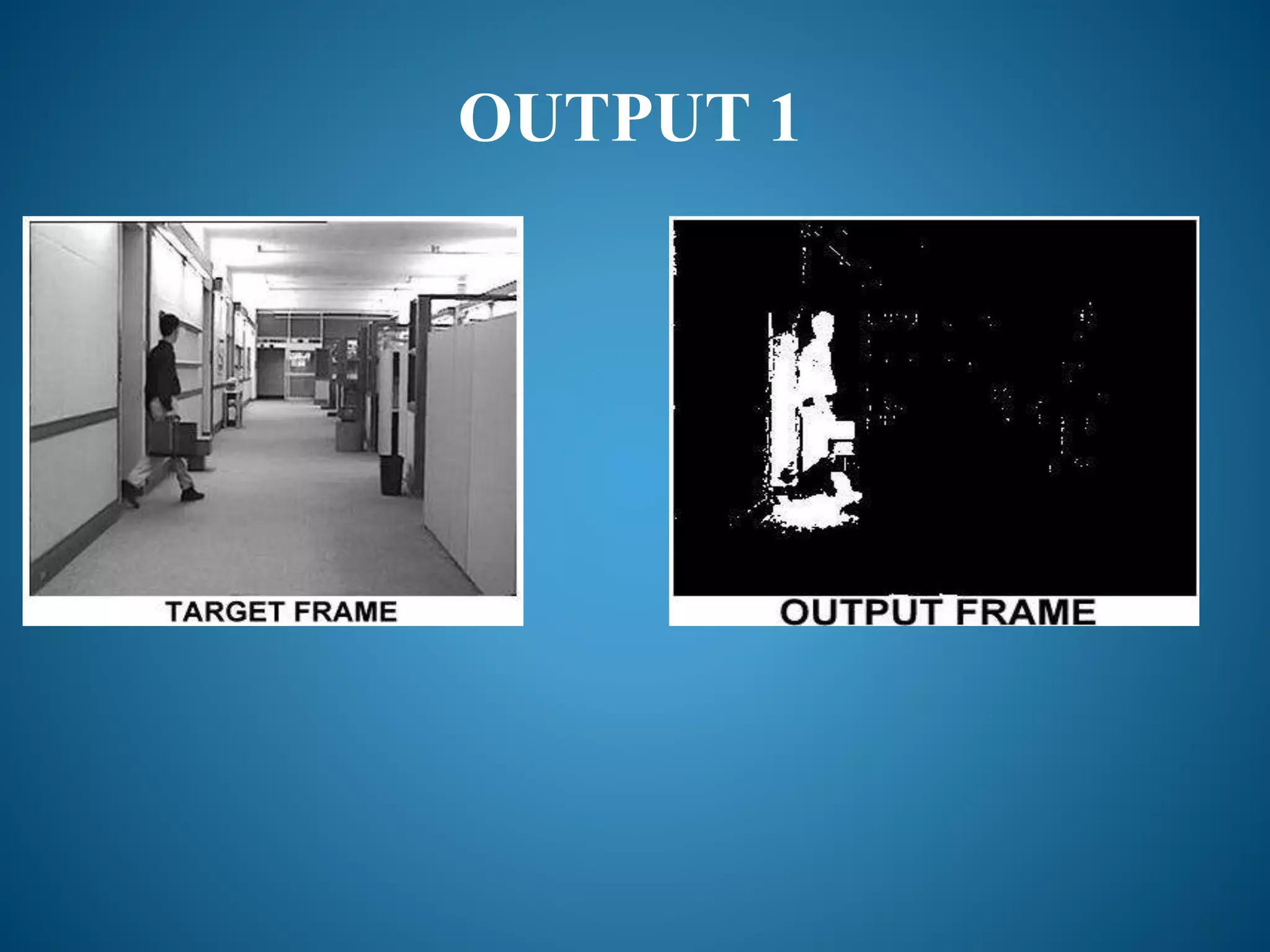
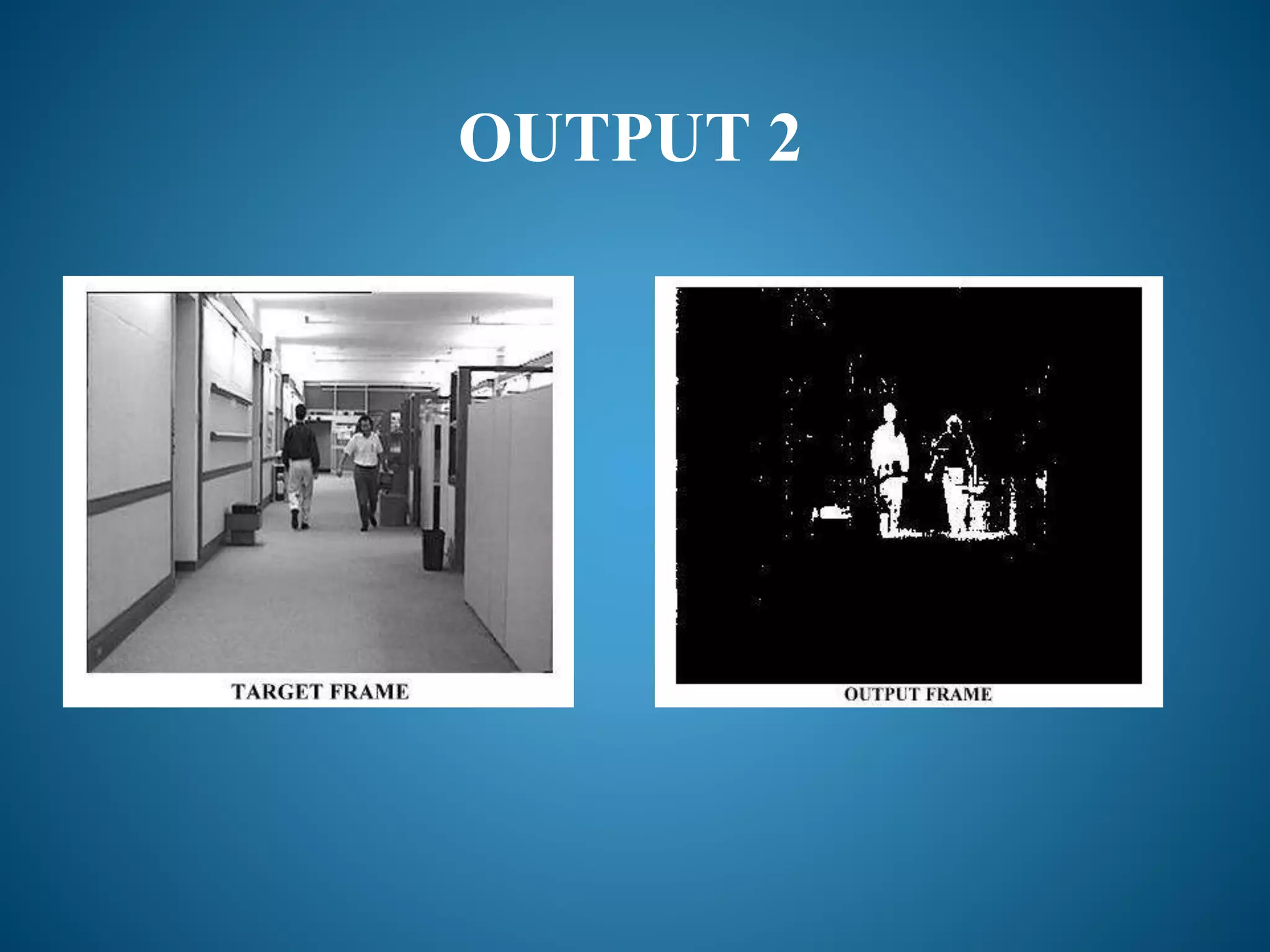
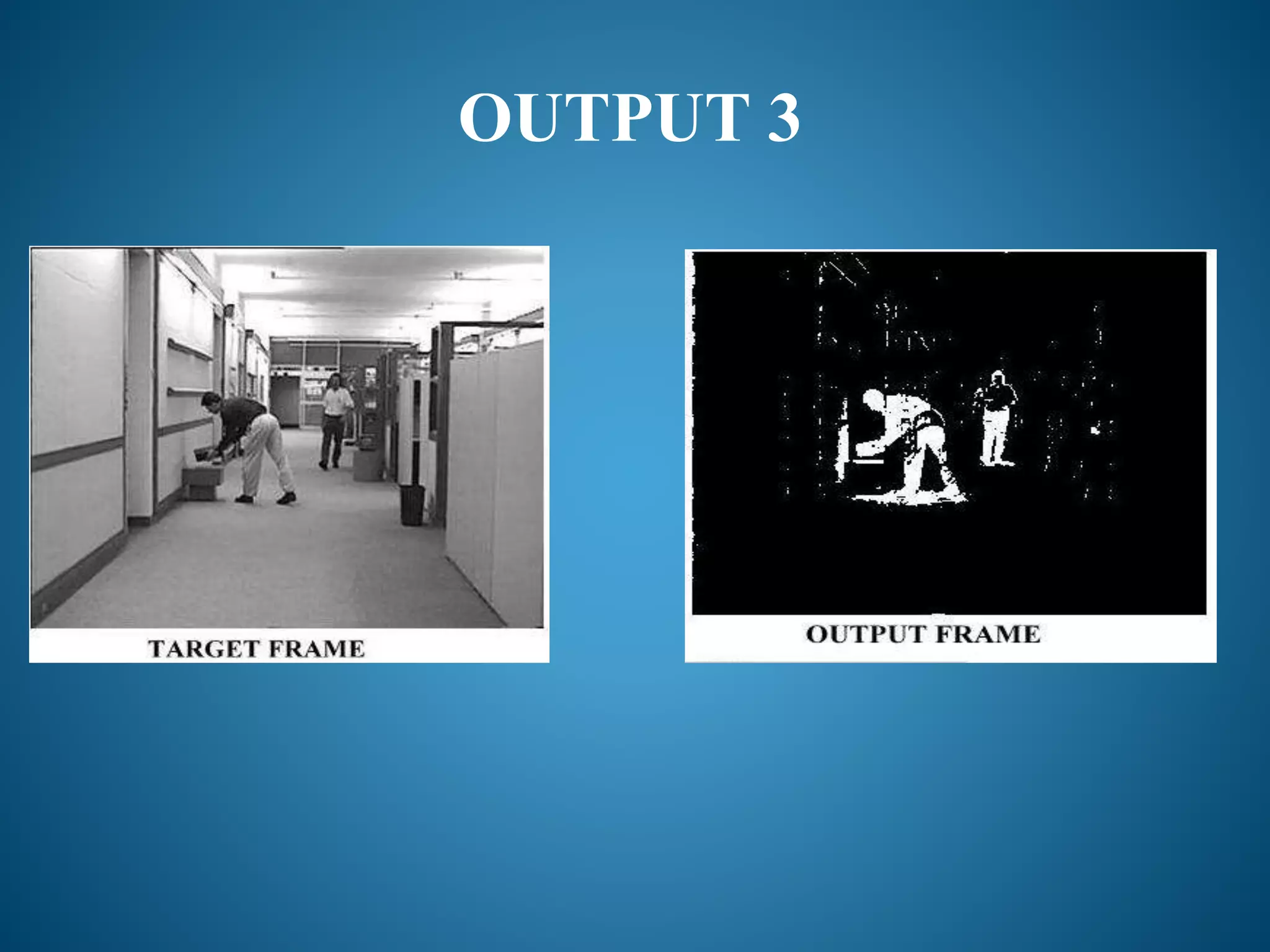

The document describes using a Hopfield neural network to detect moving objects in videos. The objective is to devise a method to identify differences between frames to detect movements. A Hopfield network is used because it can serve as a content addressable memory. The network consists of neurons corresponding to pixels that are connected to neighboring pixels. Difference frames are obtained and iteratively updated until the network reaches a stable minimum energy state. This allows changed and unchanged pixels to be classified. Applications include video surveillance, people tracking, and traffic monitoring.

![Competitive Learning [Deep Learning And Nueral Networks].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/competitivelearning-240211053020-bc9a8437-thumbnail.jpg?width=640&height=640&fit=bounds)