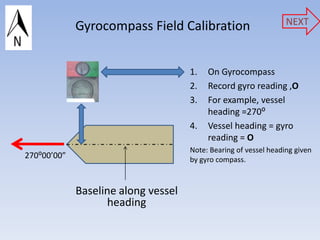
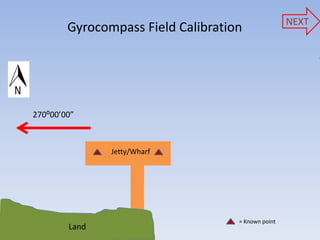
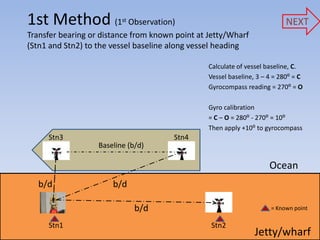
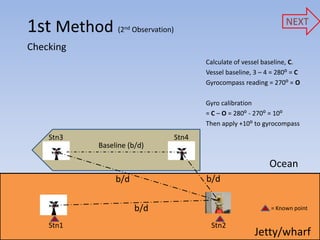
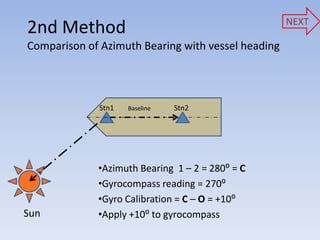
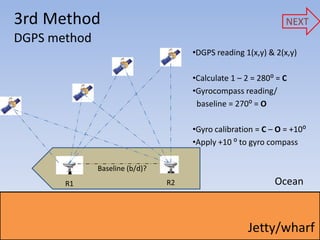
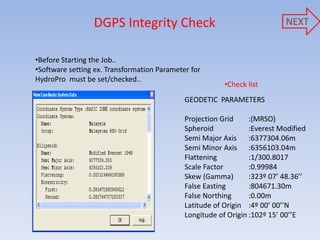
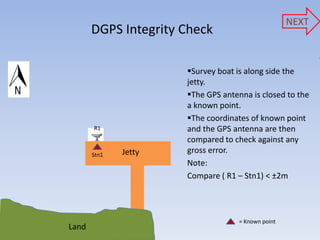
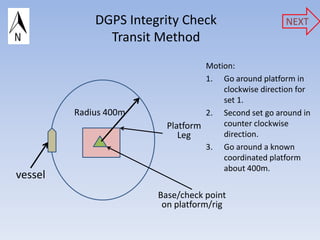
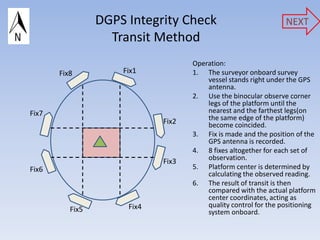
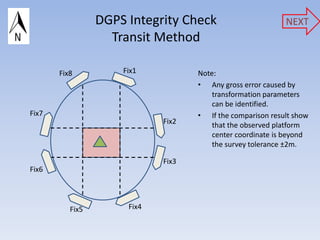
This document summarizes calibration procedures for a gyrocompass and DGPS integrity checks. It describes taking gyrocompass readings and comparing them to known baselines to calculate calibration adjustments. It also outlines checking DGPS positioning by comparing coordinates for a known point to the DGPS readings. Transit methods are provided to circle a platform and calculate its center coordinates to check the DGPS system.