Downloaded 206 times
![Adjacency Matrix
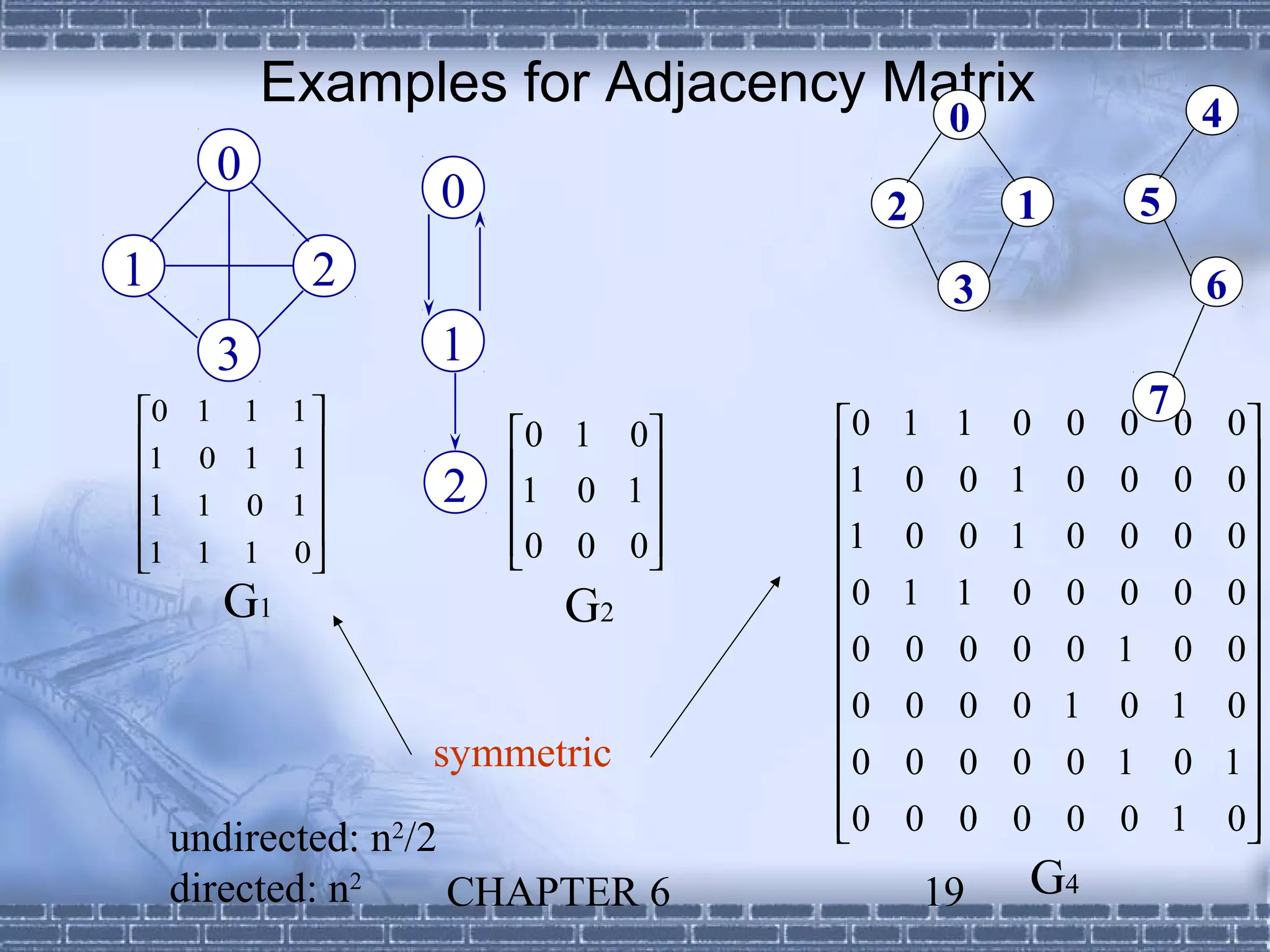
Let G=(V,E) be a graph with n vertices.
The adjacency matrix of G is a two-dimensional
n by n array, say adj_mat
- If the edge (vi, vj) is in E(G), adj_mat[i][j]=1
- If there is no such edge in E(G), adj_mat[i][j]=0
The adjacency matrix for an undirected graph is
symmetric; the adjacency matrix for a digraph
need not be symmetric
CHAPTER 6 18](https://image.slidesharecdn.com/graphs-130409104239-phpapp02/75/Graphs-18-2048.jpg)
![Merits of Adjacency Matrix
From the adjacency matrix, to determine
the connection of vertices is easy
n −1
The degree of a vertex is ∑ adj _ mat[i][ j ]
j=0
For a digraph, the row sum is the
out_degree, while the column sum is the
in_degree
n −1 n −1
ind (vi ) = ∑ A[ j , i ] outd (vi ) = ∑ A[i , j ]
j =0 j =0
CHAPTER 6 20](https://image.slidesharecdn.com/graphs-130409104239-phpapp02/75/Graphs-20-2048.jpg)
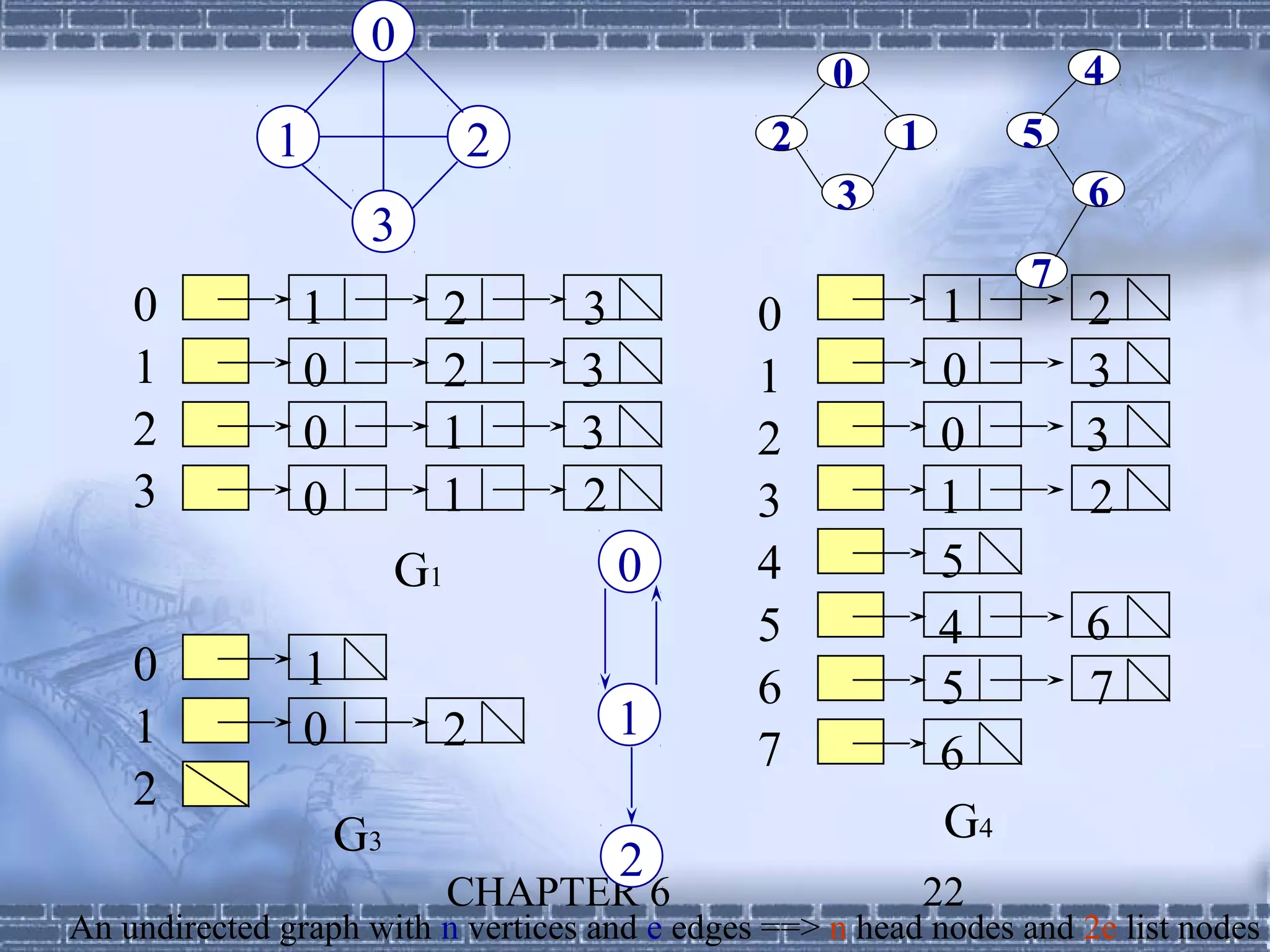
![Data Structures for Adjacency Lists
Each row in adjacency matrix is represented as an adjacency list.
#define MAX_VERTICES 50
typedef struct node *node_pointer;
typedef struct node {
int vertex;
struct node *link;
};
node_pointer graph[MAX_VERTICES];
int n=0; /* vertices currently in use */
CHAPTER 6 21](https://image.slidesharecdn.com/graphs-130409104239-phpapp02/75/Graphs-21-2048.jpg)
![Compact Representation
0 4
node[0] … node[n-1]: starting point for vertices
2 1 5 node[n]: n+2e+1
3 6 node[n+1] … node[n+2e]: head node of edge
7
[0] 9 [8] 23 [16] 2
[1] 11 0 [9] 1 4 [17] 5
[2] 13 [10] 2 5 [18] 4
[3] 15 1 [11] 0 [19] 6
[4] 17 [12] 3 6 [20] 5
[5] 18 2 [13] 0 [21] 7
[6] 20 [14] 3 7 [22] 6
[7] 22 3 [15] 1
CHAPTER 6 24](https://image.slidesharecdn.com/graphs-130409104239-phpapp02/75/Graphs-24-2048.jpg)
![Adjacency Multilists
typedef struct edge *edge_pointer;
typedef struct edge {
short int marked;
int vertex1, vertex2;
edge_pointer path1, path2;
};
edge_pointer graph[MAX_VERTICES];
marked vertex1 vertex2 path1 path2
CHAPTER 6 31](https://image.slidesharecdn.com/graphs-130409104239-phpapp02/75/Graphs-31-2048.jpg)
![*Figure 6.19:Graph G and its adjacency lists (p.274)
depth first search: v0, v1, v3, v7, v4, v5, v2, v6
#define FALSE 0
#define TRUE 1
short int visited [MAX_VERTEX];
void dfs(int v)
{
node_pointer w;
visited[v]= TRUE;
printf(“%5d”, v);
for (w=graph[v]; w;
w=w->link)
if (!visited[w->vertex])
dfs(w->vertex);
}
CHAPTER 6 33](https://image.slidesharecdn.com/graphs-130409104239-phpapp02/75/Graphs-33-2048.jpg)

![Breadth First Search (Cont.)
typedef struct queue *queue_pointer; printf(“%5d”, v);
typedef struct queue { visited[v] = TRUE;
addq(&front, &rear, v);
int vertex; while (front) {
queue_pointer link; v= deleteq(&front);
}; for (w=graph[v]; w; w=w->link)
if (!visited[w->vertex]) {
void addq(queue_pointer *, printf(“%5d”, w->vertex);
queue_pointer *, int); addq(&front, &rear, w-
>vertex);
int deleteq(queue_pointer *);
visited[w->vertex] = TRUE;
void bfs(int v) }
{ }
node_pointer w; }
queue_pointer front, rear;
adjacency list: O(e)
front = rear = NULL;
adjacency matrix: O(n2)
CHAPTER 6 35](https://image.slidesharecdn.com/graphs-130409104239-phpapp02/75/Graphs-35-2048.jpg)
![Connected Components
void connected(void)
{
for (i=0; i<n; i++) {
if (!visited[i]) {
dfs(i);
printf(“n”);
}
} adjacency list: O(n+e)
adjacency matrix: O(n2)
}
CHAPTER 6 36](https://image.slidesharecdn.com/graphs-130409104239-phpapp02/75/Graphs-36-2048.jpg)

![Data Structure for SSAD
#define MAX_VERTICES 6
adjacency matrix
int cost[][MAX_VERTICES]=
{{ 0, 50, 10, 1000, 45, 1000},
{1000, 0, 15, 1000, 10, 1000},
{ 20, 1000, 0, 15, 1000, 1000},
{1000, 20, 1000, 0, 35, 1000},
{1000, 1000, 30, 1000, 0, 1000},
{1000, 1000, 1000, 3, 1000, 0}};
int distance[MAX_VERTICES];
short int found{MAX_VERTICES];
int n = MAX_VERTICES;
CHAPTER 6 57](https://image.slidesharecdn.com/graphs-130409104239-phpapp02/75/Graphs-57-2048.jpg)
![Single Source All Destinations
void shortestpath(int v, int cost[][MAX_ERXTICES],
int distance[], int n, short int found[])
{
int i, u, w;
for (i=0; i<n; i++) {
found[i] = FALSE;
distance[i] = cost[v][i]; O(n)
}
found[v] = TRUE;
distance[v] = 0;
CHAPTER 6 58](https://image.slidesharecdn.com/graphs-130409104239-phpapp02/75/Graphs-58-2048.jpg)
![for (i=0; i<n-2; i++) {determine n-1 paths from v
u = choose(distance, n, found);
found[u] = TRUE;
for (w=0; w<n; w++)
if (!found[w]) 與 u 相連的端點 w
if (distance[u]+cost[u][w]<distance[w])
distance[w] = distance[u]+cost[u][w];
}
}
O(n2)
CHAPTER 6 59](https://image.slidesharecdn.com/graphs-130409104239-phpapp02/75/Graphs-59-2048.jpg)
![6.4.2 All Pairs Shortest Paths
Find the shortest paths between all pairs of vertices.
Solution 1
–Apply shortest path n times with each vertex as source.
O(n3)
Solution 2
–Represent the graph G by its cost adjacency matrix with
cost[i][j]
–If the edge <i,j> is not in G, the cost[i][j] is set to some
sufficiently large number
k
–A [i][j] is the cost of the shortest path form i to j, using
only those intermediate vertices with an index <= k
CHAPTER 6 60](https://image.slidesharecdn.com/graphs-130409104239-phpapp02/75/Graphs-60-2048.jpg)
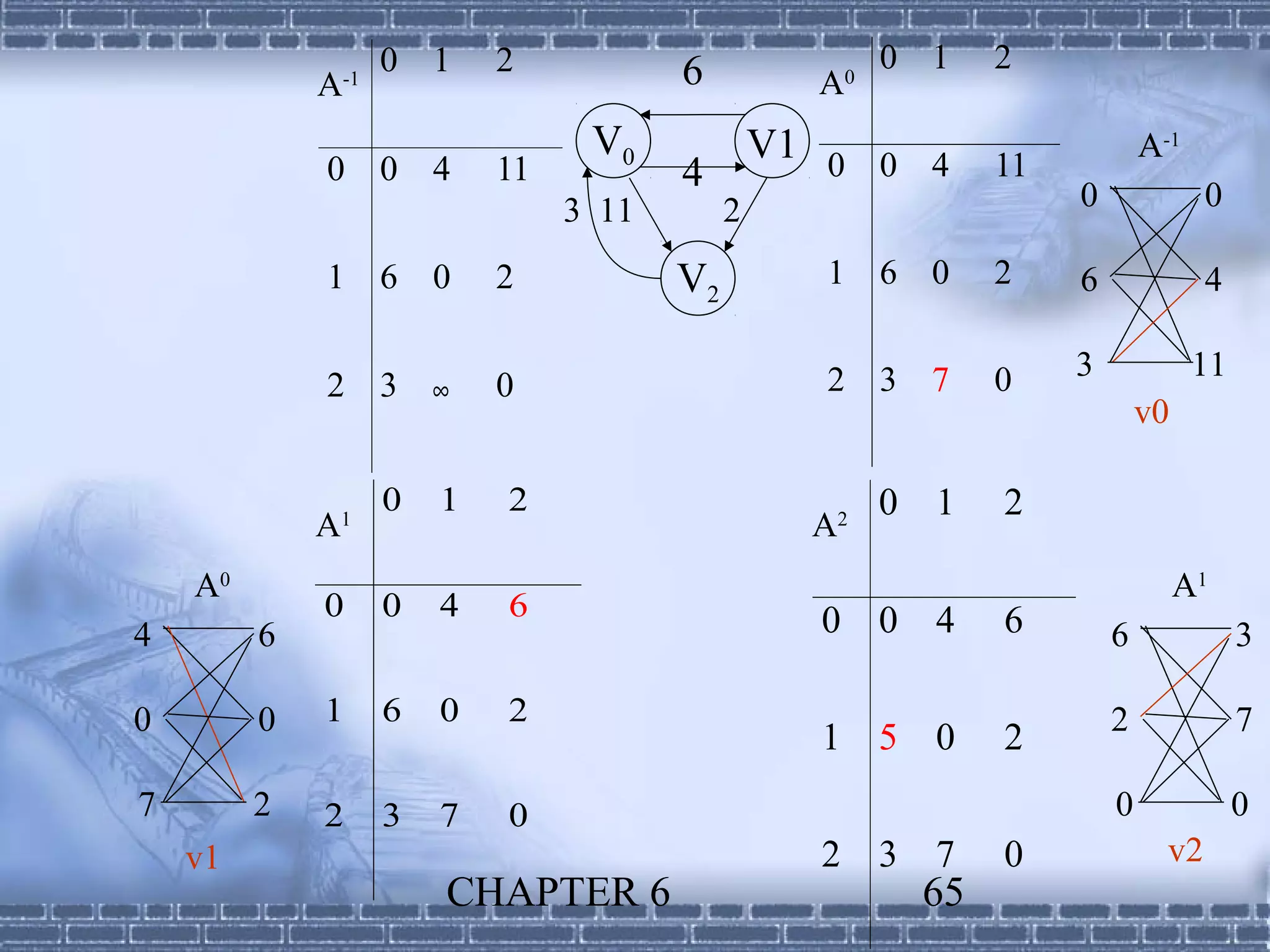
![All Pairs Shortest Paths (Cont.)
n-1
The cost of the shortest path from i to j is A [i]
[j], as no vertex in G has an index greater than
n-1
-1
A [i][j]=cost[i][j]
n-1
Calculate the A, A, A, ..., A from A-1 iteratively
0 1 2
k k-1 k-1 k-1
A [i][j]=min{A [i][j], A [i][k]+A [k][j]}, k>=0
CHAPTER 6 61](https://image.slidesharecdn.com/graphs-130409104239-phpapp02/75/Graphs-61-2048.jpg)
![Algorithm for All Pairs Shortest Paths
void allcosts(int cost[][MAX_VERTICES],
int distance[][MAX_VERTICES], int n)
{
int i, j, k;
for (i=0; i<n; i++)
for (j=0; j<n; j++)
distance[i][j] = cost[i][j];
for (k=0; k<n; k++)
for (i=0; i<n; i++)
for (j=0; j<n; j++)
if (distance[i][k]+distance[k][j]
< distance[i][j])
distance[i][j]=
distance[i][k]+distance[k][j];
}
CHAPTER 6 63](https://image.slidesharecdn.com/graphs-130409104239-phpapp02/75/Graphs-63-2048.jpg)
![*(p.307)
typedef struct node *node_pointer;
typedef struct node {
int vertex;
node_pointer link;
};
typedef struct {
int count;
node_pointer link;
} hdnodes;
hdnodes graph[MAX_VERTICES];
CHAPTER 6 73](https://image.slidesharecdn.com/graphs-130409104239-phpapp02/75/Graphs-73-2048.jpg)
![*Program 6.14: Topological sort (p.308)
void topsort (hdnodes graph [] , int n)
{
int i, j, k, top;
node_pointer ptr;
/* create a stack of vertices with no predecessors */
top = -1;
for (i = 0; i < n; i++)
if (!graph[i].count) {no predecessors, stack is linked through
graph[i].count = top; count field
O(n) top = i;
}
for (i = 0; i < n; i++)
if (top == -1) {
fprintf(stderr, “n Network has a cycle. Sort terminated. n”);
exit(1);
}
CHAPTER 6 74](https://image.slidesharecdn.com/graphs-130409104239-phpapp02/75/Graphs-74-2048.jpg)
![} Continued
else {
j = top; /* unstack a vertex */
top = graph[top].count;
printf(“v%d, “, j);
for (ptr = graph [j]. link; ptr ;ptr = ptr ->link ){
/* decrease the count of the successor vertices of j */
k = ptr ->vertex;
graph[k].count --;
O(e)
if (!graph[k].count) {
/* add vertex k to the stack*/
graph[k].count = top;
top = k;
}
} O(e+n)
}
} CHAPTER 6 75](https://image.slidesharecdn.com/graphs-130409104239-phpapp02/75/Graphs-75-2048.jpg)
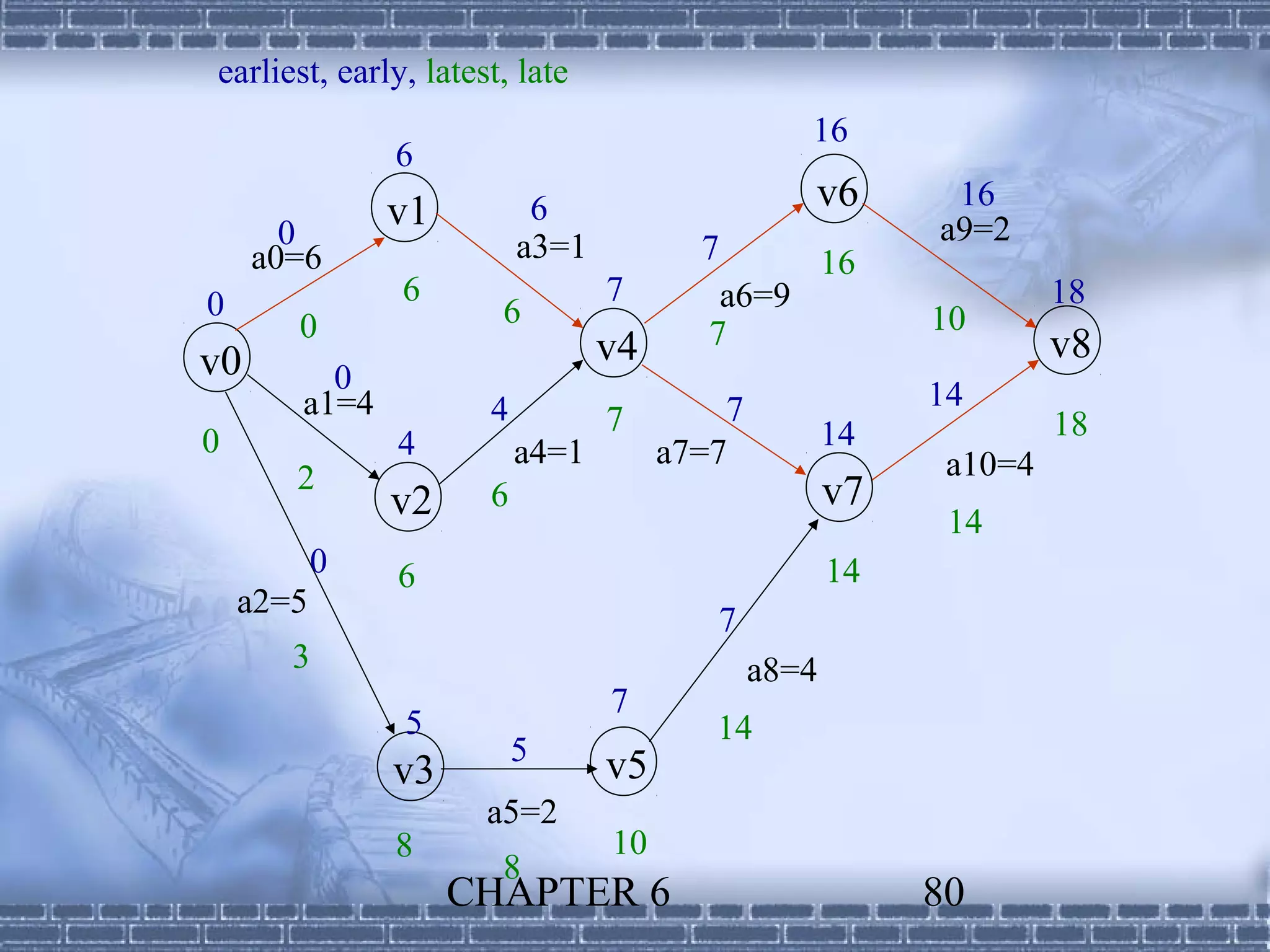
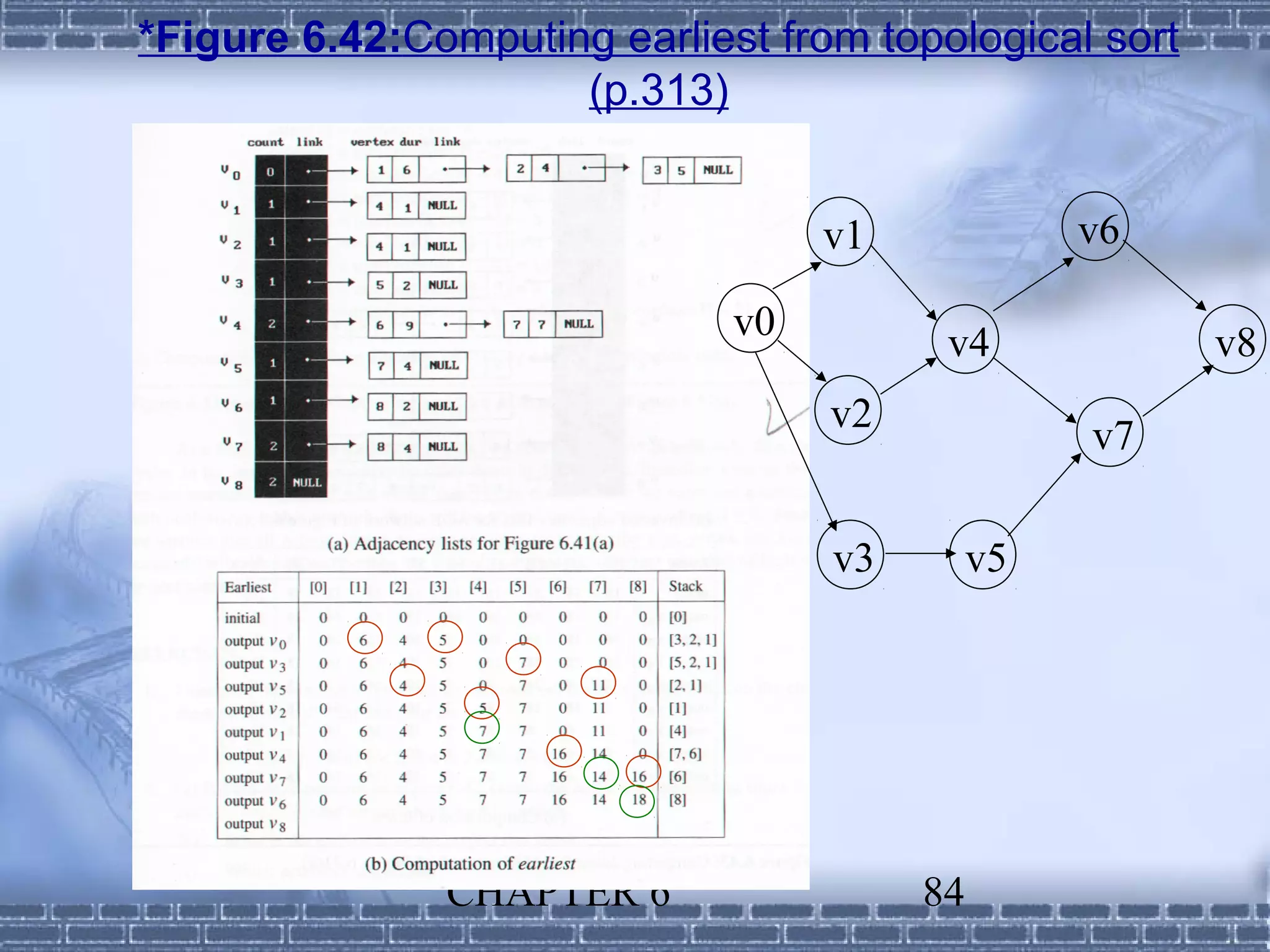
![Calculation of Earliest Times
earliest[j]
–the earliest event occurrence time
earliest[0]=0
earliest[j]=max{earliest[i]+duration of <i,j>}
i ∈p(j)
latest[j]
–the latest event occurrence time
vk ai vl
early(i)=earliest(k)
late(i)=latest(l)-duration of ai
CHAPTER 6 82](https://image.slidesharecdn.com/graphs-130409104239-phpapp02/75/Graphs-82-2048.jpg)
![vi1
vi2 vj
forward stage .
.
.
vin
if (earliest[k] < earliest[j]+ptr->duration)
earliest[k]=earliest[j]+ptr->duration
CHAPTER 6 83](https://image.slidesharecdn.com/graphs-130409104239-phpapp02/75/Graphs-83-2048.jpg)
![Calculation of Latest Times
latest[j]
• the latest event occurrence time
latest[n-1]=earliest[n-1]
latest[j]=min{latest[i]-duration of <j,i>}
i ∈s(j)
vi1
vj vi2 backward stage
.
.
.
vin
if (latest[k] > latest[j]-ptr->duration)
CHAPTER 6 85
latest[k]=latest[j]-ptr->duration](https://image.slidesharecdn.com/graphs-130409104239-phpapp02/75/Graphs-85-2048.jpg)
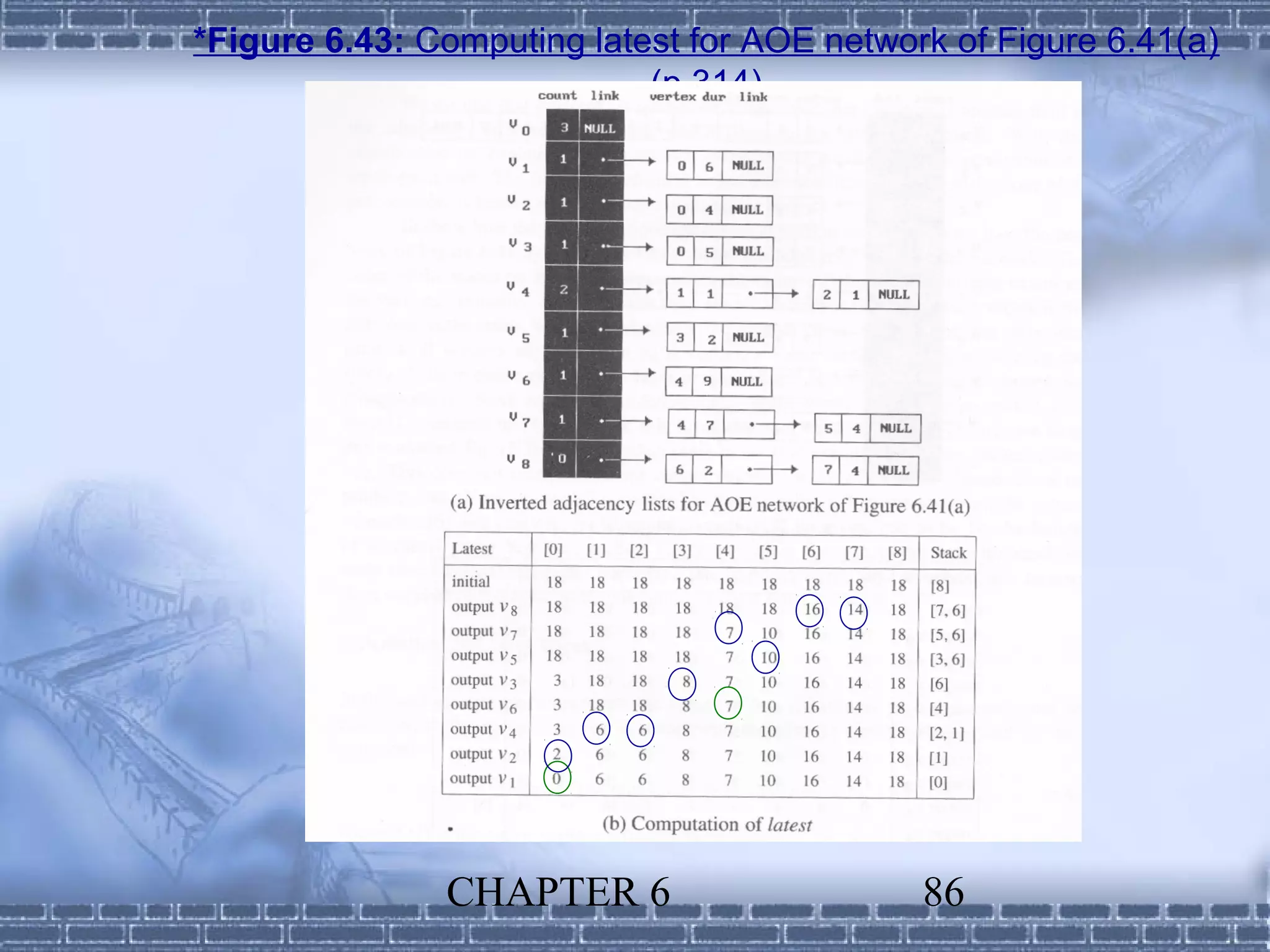
![*Figure 6.43(continued):Computing latest of AOE network of Figure
6.41(a)
(p.315)
latest[8]=earliest[8]=18
latest[6]=min{earliest[8] - 2}=16
latest[7]=min{earliest[8] - 4}=14
latest[4]=min{earliest[6] - 9;earliest[7] -7}= 7
latest[1]=min{earliest[4] - 1}=6
latest[2]=min{earliest[4] - 1}=6
latest[5]=min{earliest[7] - 4}=10
latest[3]=min{earliest[5] - 2}=8
latest[0]=min{earliest[1] - 6;earliest[2]- 4; earliest[3]
-5}=0
(c)Computation of latest from Equation (6.4) using a reverse topological
order
CHAPTER 6 87](https://image.slidesharecdn.com/graphs-130409104239-phpapp02/75/Graphs-87-2048.jpg)


![*Figure 6.46: AOE network with unreachable activities
(p.317)
a4
V3 V4
V1 a5
a6 earliest[i]=0
a0 a2
V0 V5
a1 a3
V2
CHAPTER 6 90](https://image.slidesharecdn.com/graphs-130409104239-phpapp02/75/Graphs-90-2048.jpg)

This document describes graphs and various graph representations. It defines what a graph is consisting of vertices and edges. It discusses directed and undirected graphs. It provides examples of complete graphs, subgraphs, and connected components. It describes representations of graphs including adjacency matrices and adjacency lists. It discusses operations on graphs like finding the degree of vertices and the number of edges.
Chapter 6 introduces graphs from 'Fundamentals of Data Structures in C'. Concepts of graphs, vertices, and edges are outlined.
A graph G consists of vertices V(G) and edges E(G). Types include undirected and directed graphs.
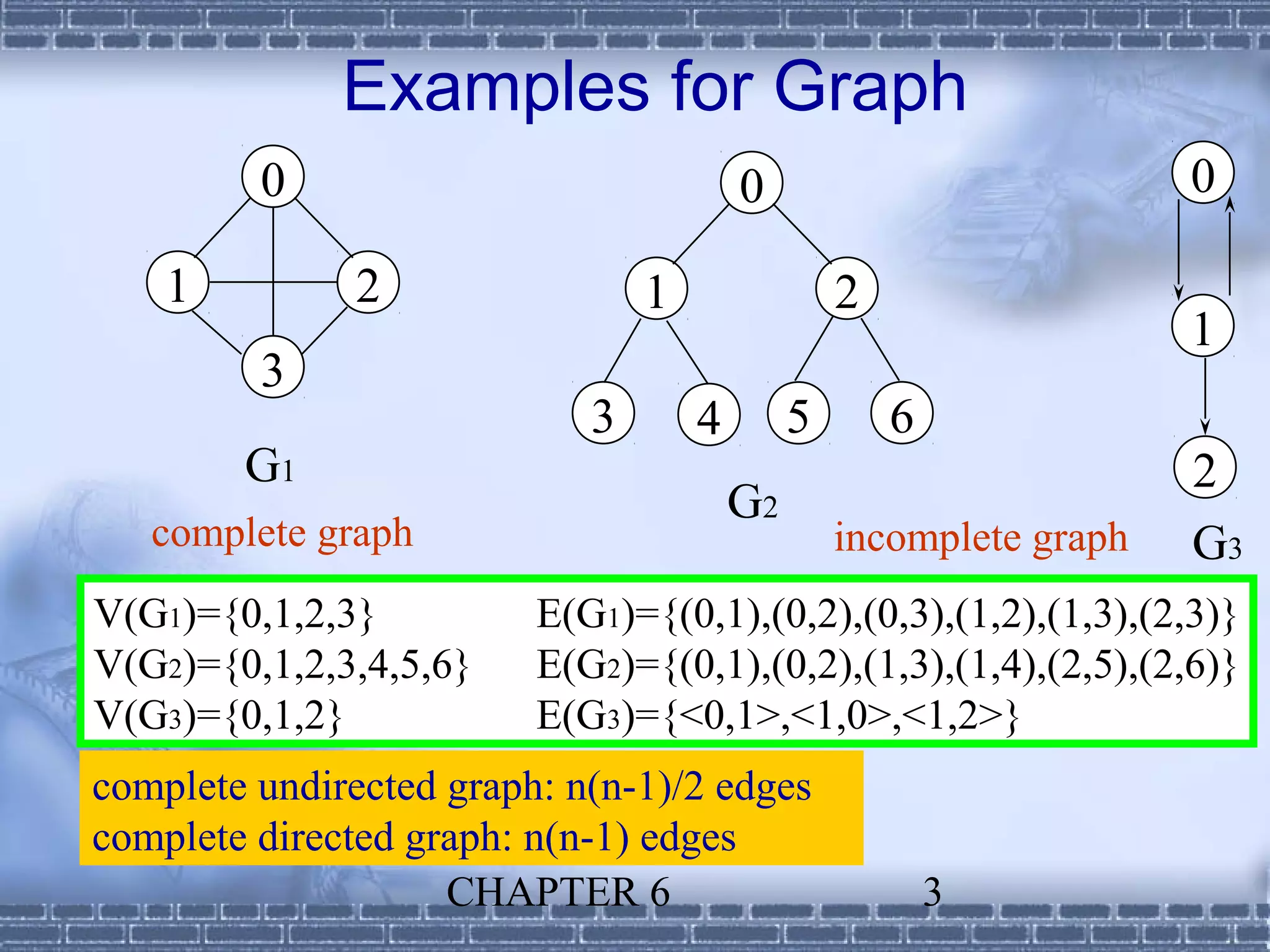
Examples of graphs are provided, including complete graph G1, incomplete graph G2, and directed graph G3 with formulas for edges.
Complete graphs have the most edges. Formulas for maximum edges in undirected and directed graphs are discussed.
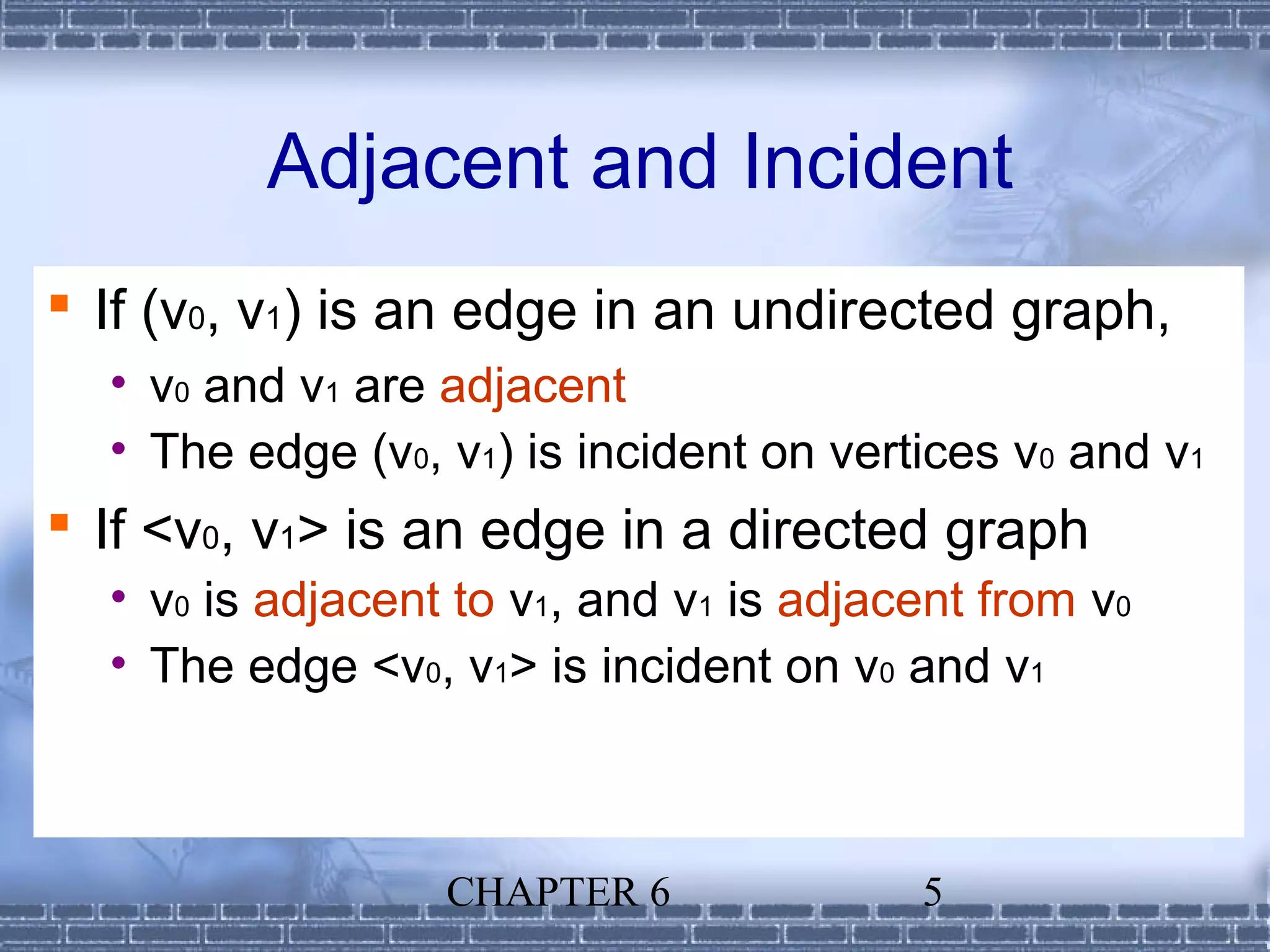
Definitions of adjacency and incidence in undirected and directed graphs are explained.
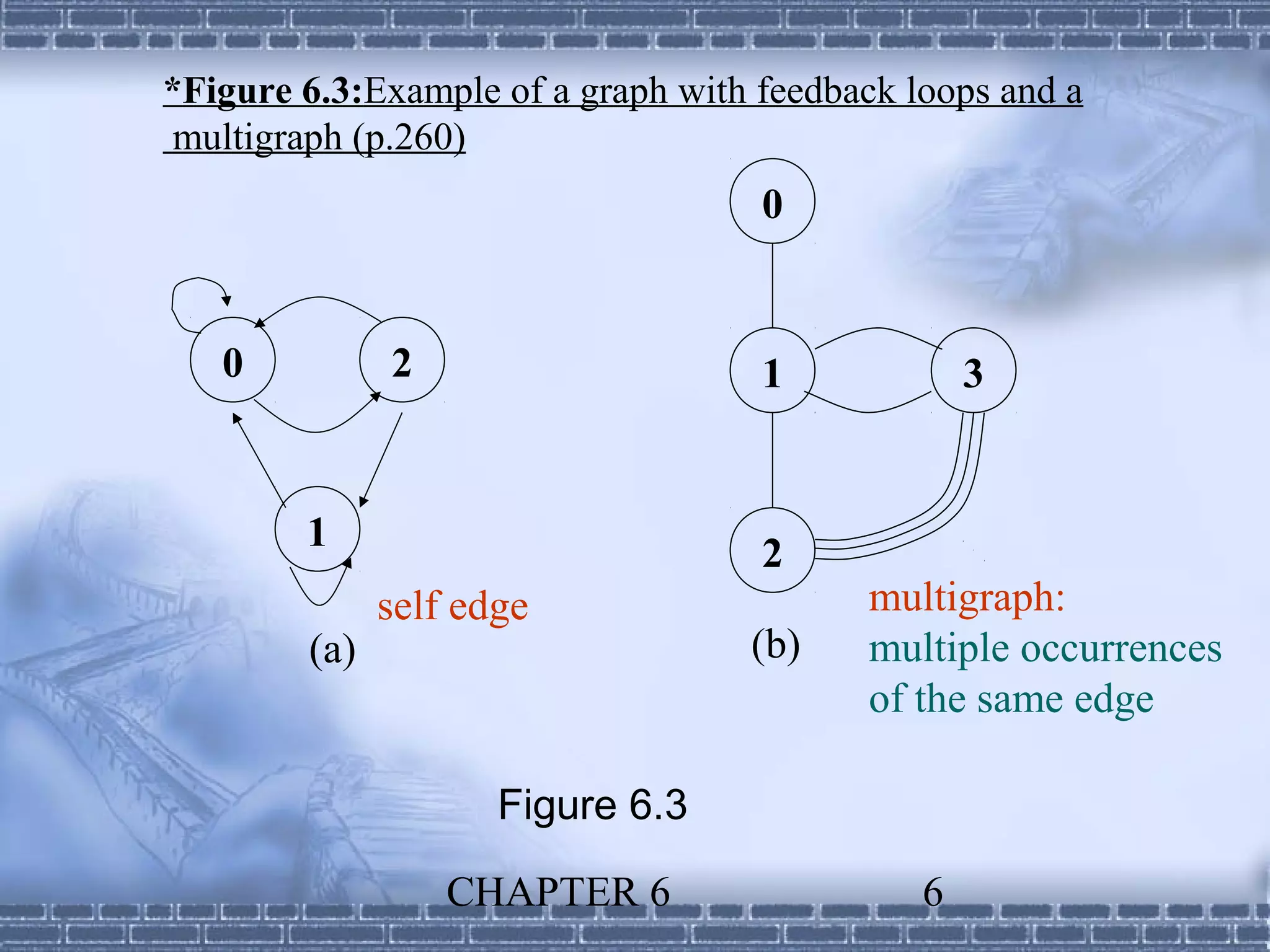
Illustrations of graphs featuring feedback loops and multigraphs are provided.
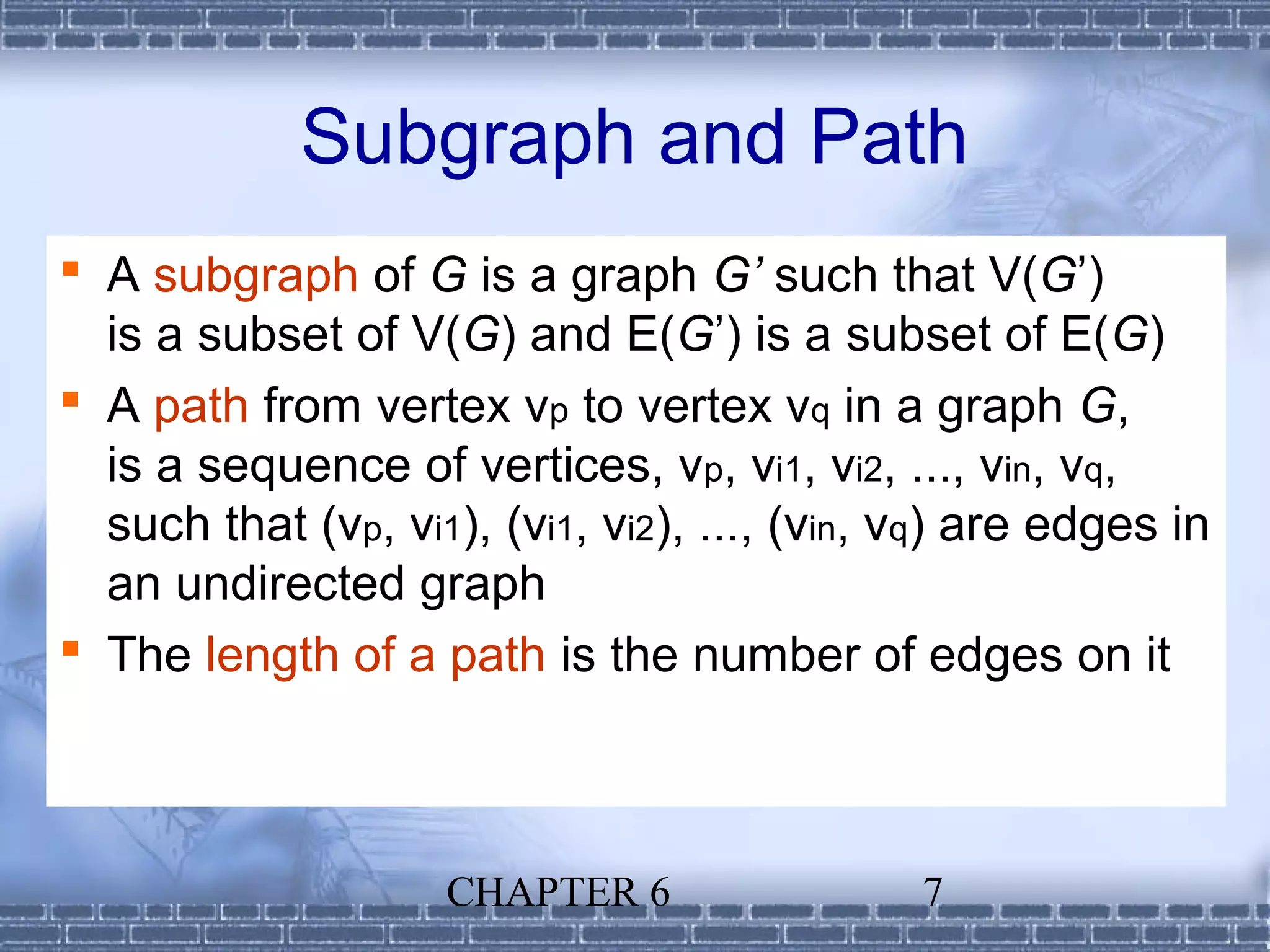
Definitions of subgraphs and paths in graphs are clarified, along with concepts of path length.
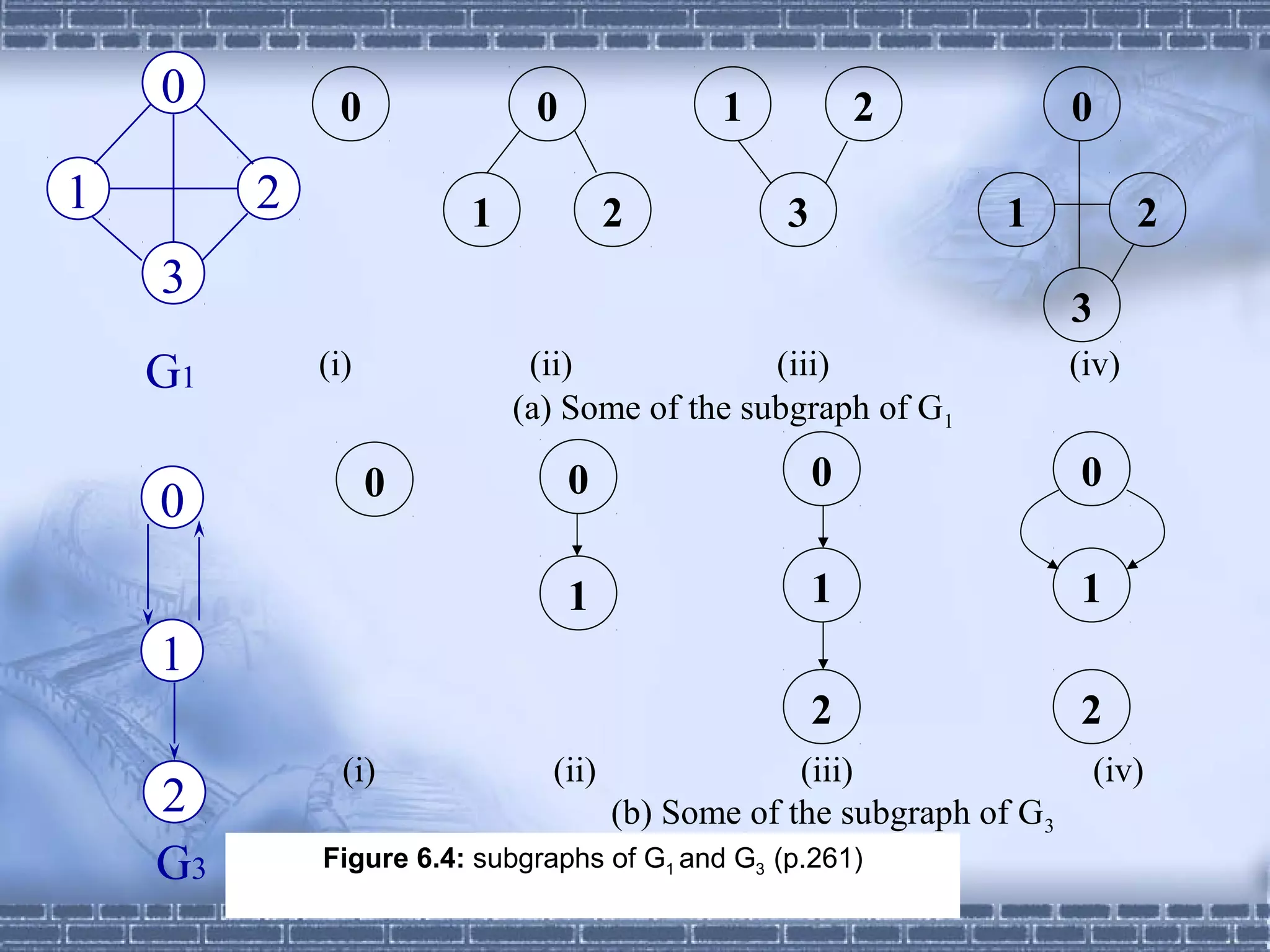
Examples of subgraphs for graphs G1 and G3 are illustrated, showing various subgraph forms.
Describes simple paths, cycles, and connected paths in undirected graphs and definitions of connectivity.
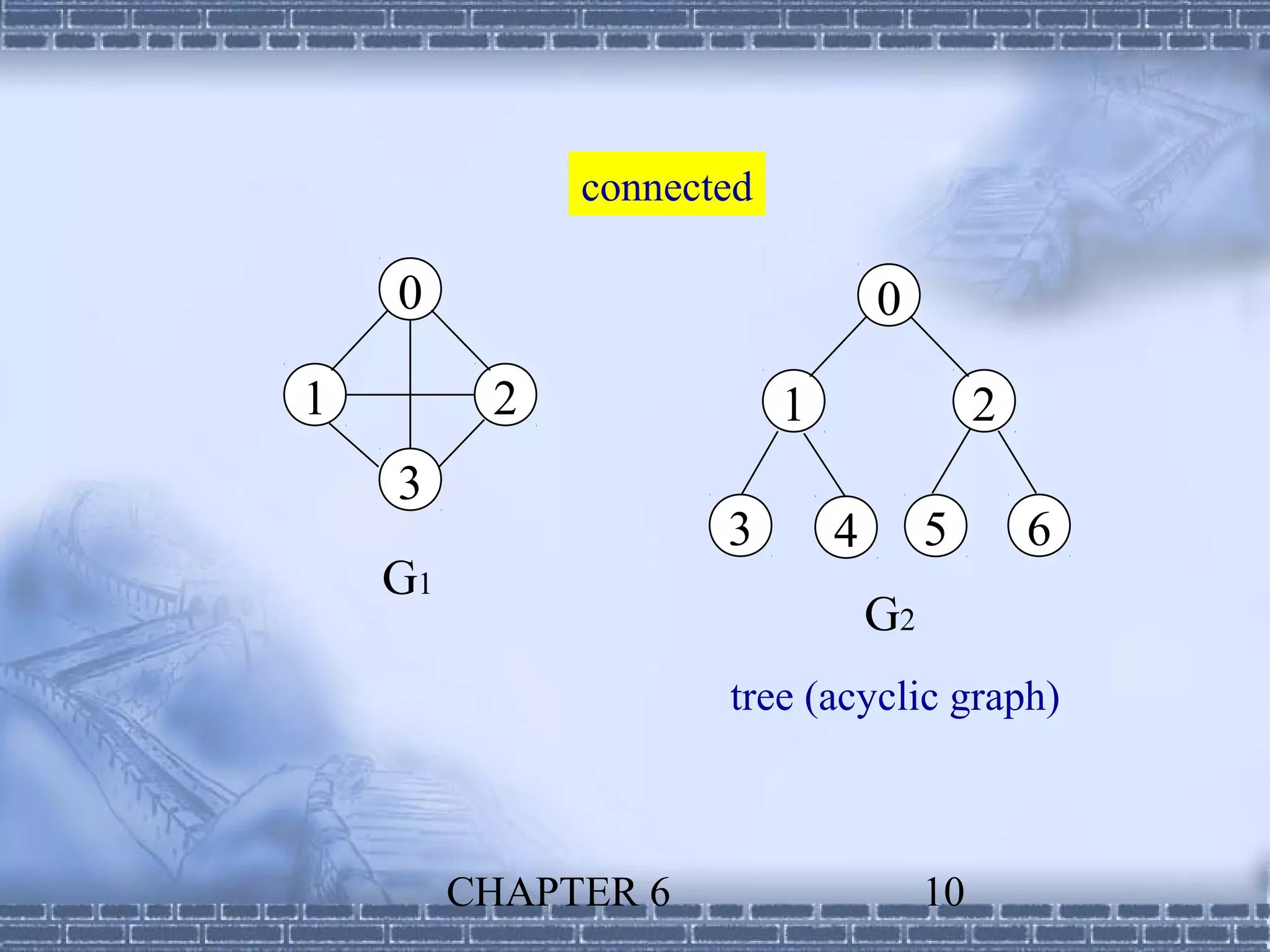
Definitions of connected components and trees explored; includes visual examples of graphs.
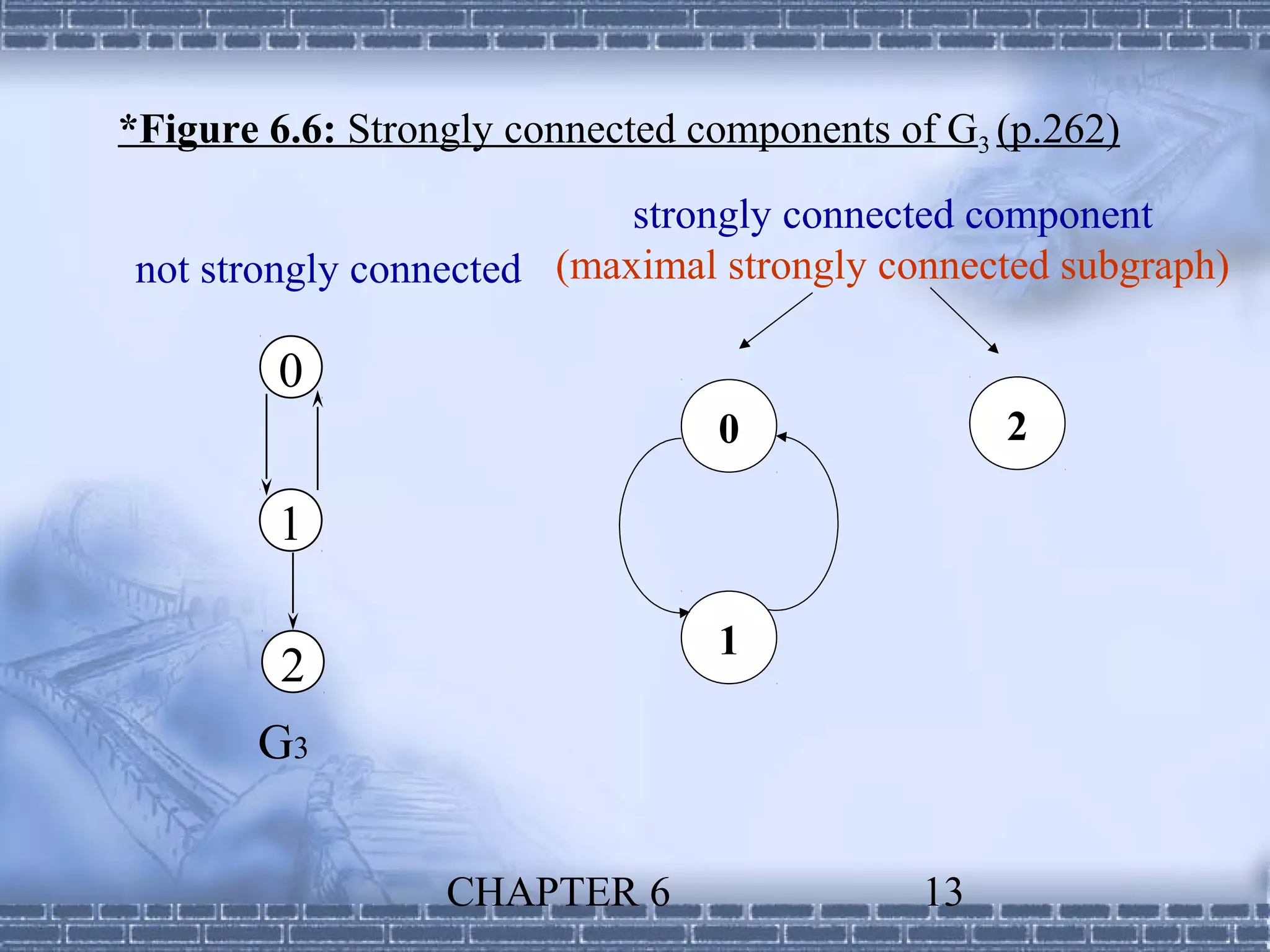
Details on connected components and trees; directed graphs are discussed with strong connectivity.
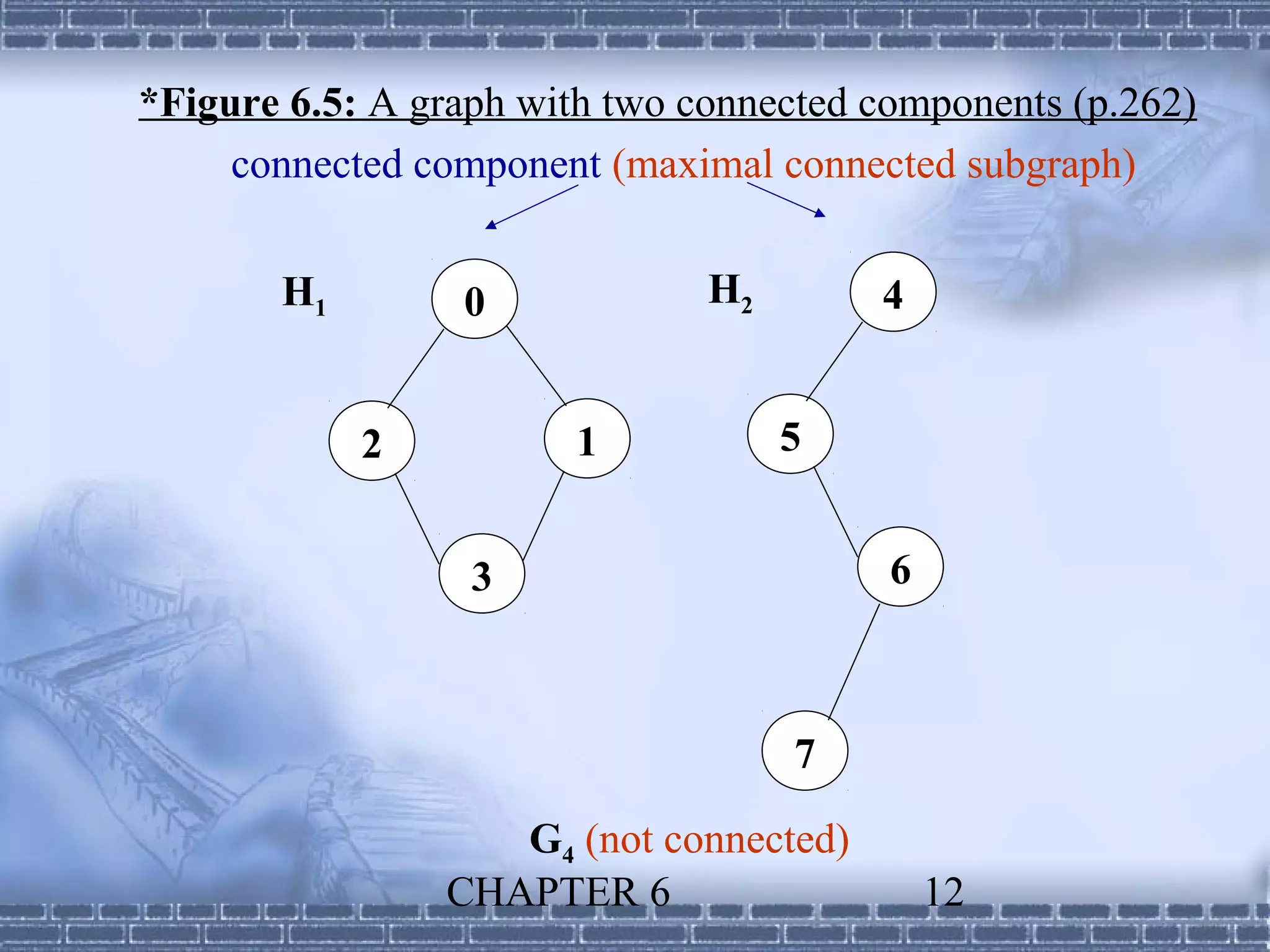
Visual representation of a graph's connected components and their significance.
Illustration of strongly connected components and their definitions in directed graphs.
Definitions of vertex degree, in-degree, out-degree, and their formulas in graph structures.
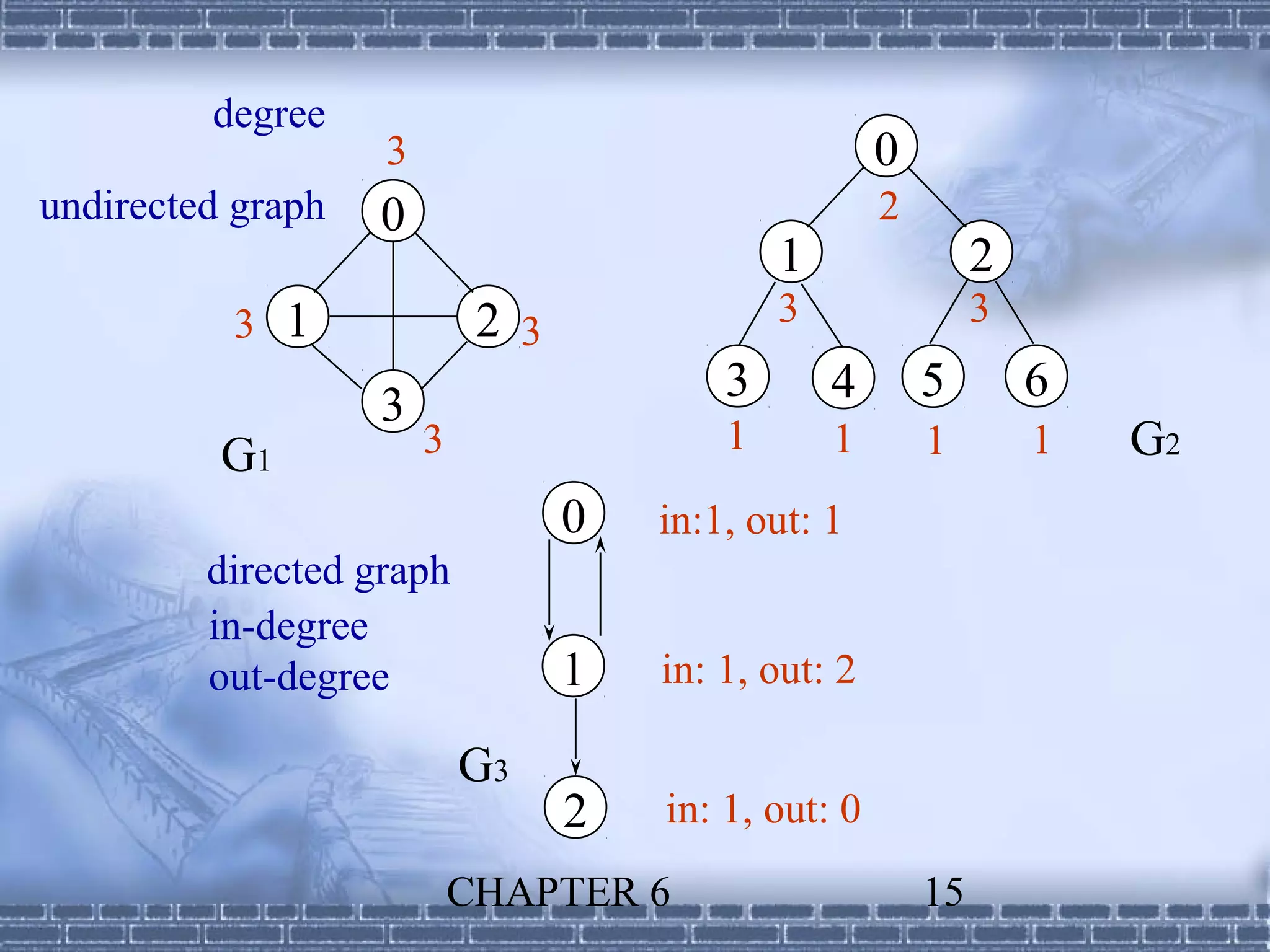
Examples showcasing degrees of vertices in various graphs, both undirected and directed.
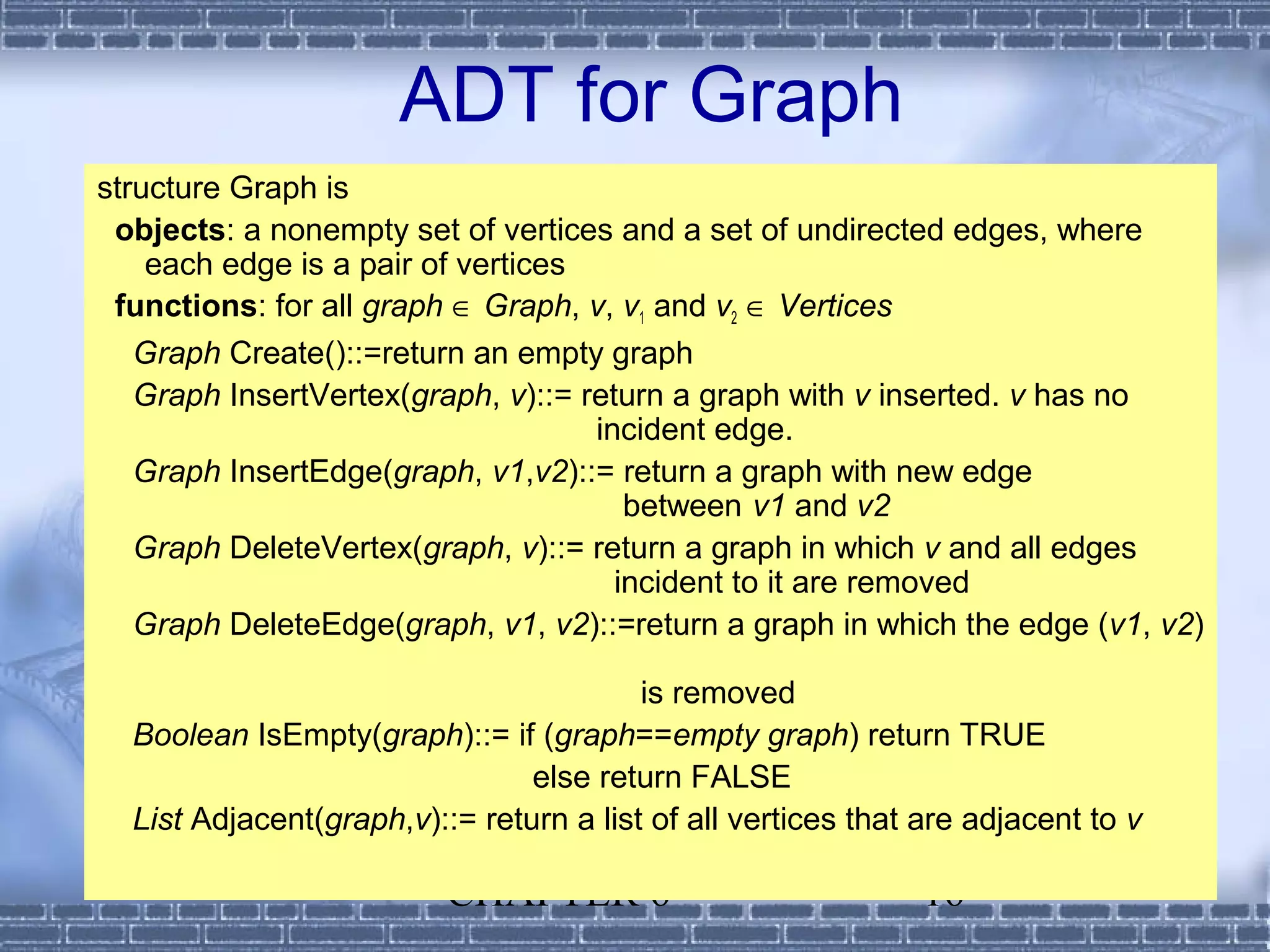
Abstract data type for graphs defined with functions for creating, inserting, and deleting vertices and edges.
Various representations of graphs are discussed: adjacency matrix, adjacency lists, and multilists.
Definitions and properties of adjacency matrices discussed, including symmetry in undirected graphs.
Examples for constructing adjacency matrices with visual representations of graphs G1, G2, G4.
The adjacency matrices provide easy connectivity checks; degree computations are also simplified.
Structure for representing adjacency lists; initialization and representation of vertices and edges.
Visual representations of adjacency lists for undirected graphs and their edge relationships.
Efficiency of operations in undirected graphs like degree calculation and edge counting.
Compact representations of graph data structures are introduced for efficient storage.
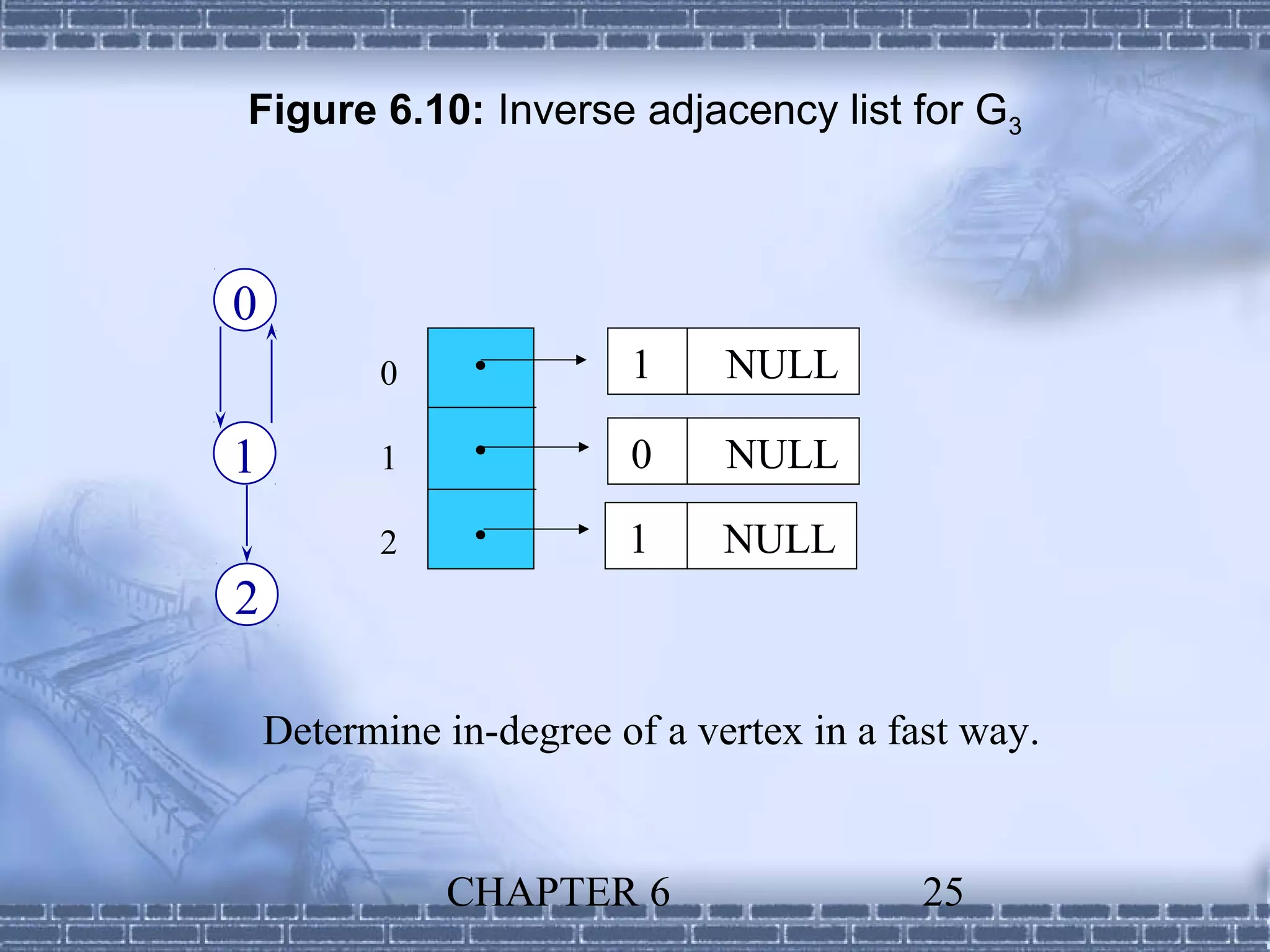
Illustration of inverse adjacency lists for graphs demonstrating fast in-degree determinations.
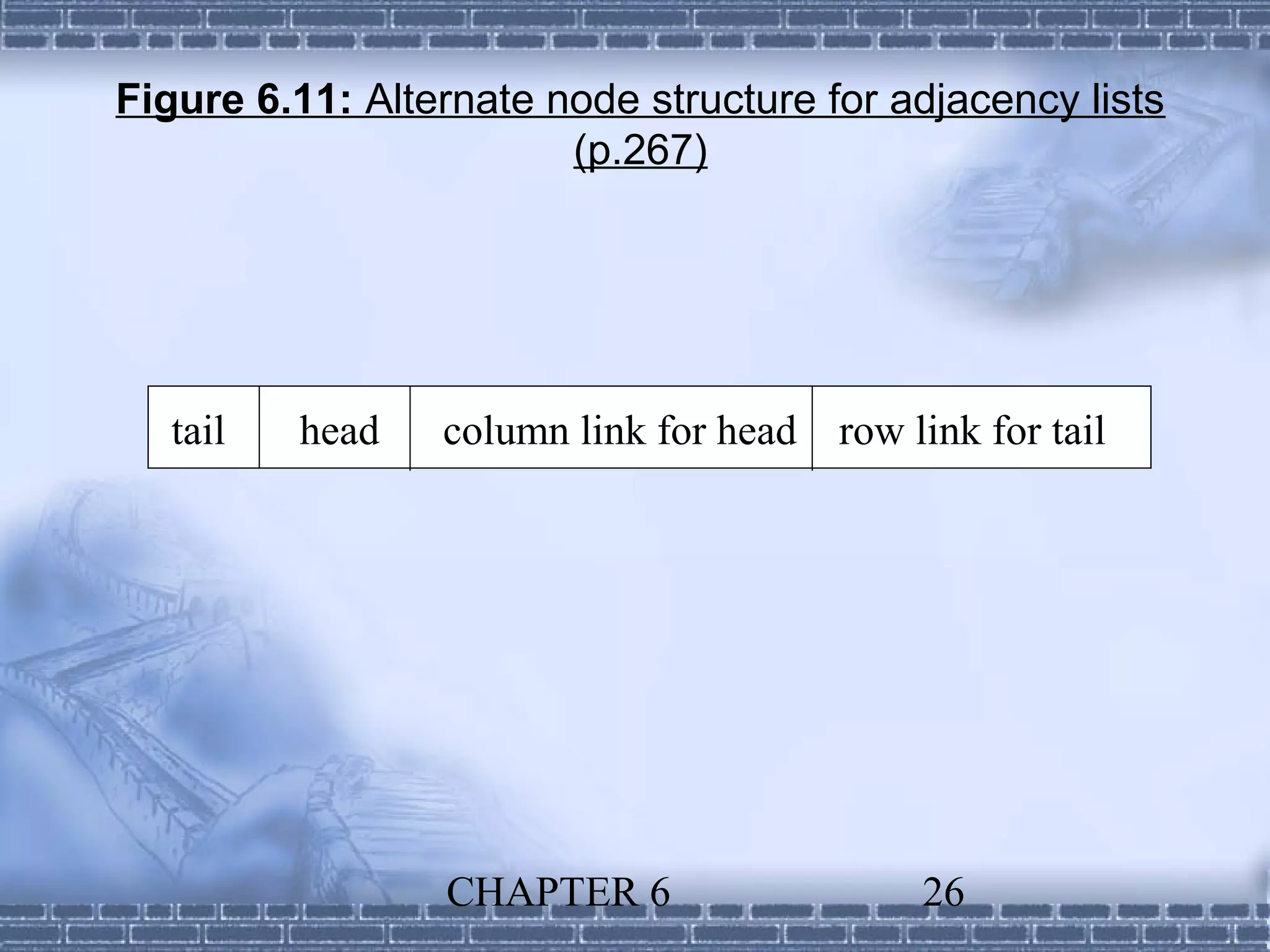
Different representations for graph nodes and edges are discussed with illustrations.
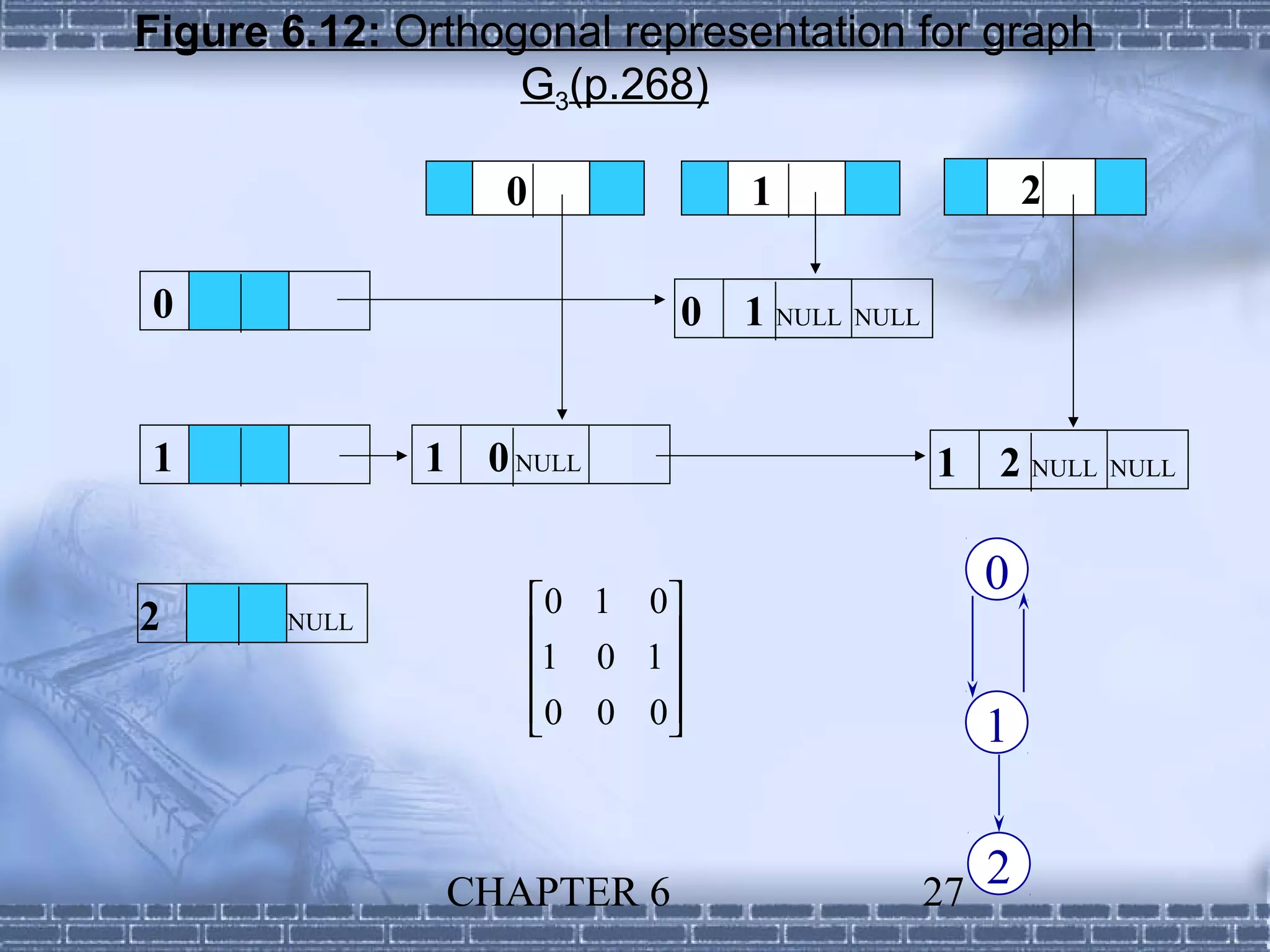
Orthogonal graph representation techniques are visually represented, demonstrating vertex relationships.
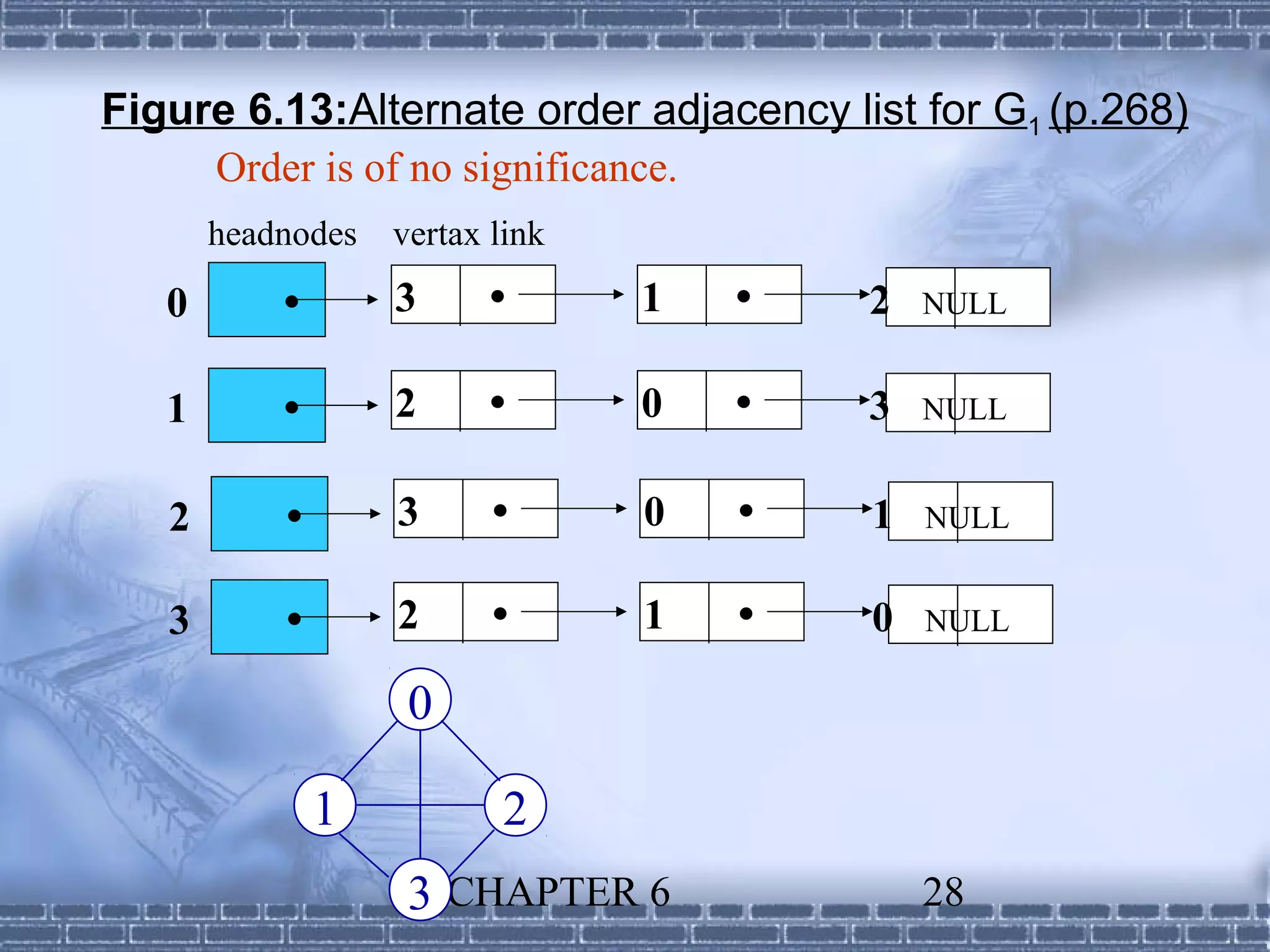
An alternate order for adjacency lists showcases the lack of significance in the order of vertices.
Introduction to adjacency multilists which allow for shared nodes among multiple lists.
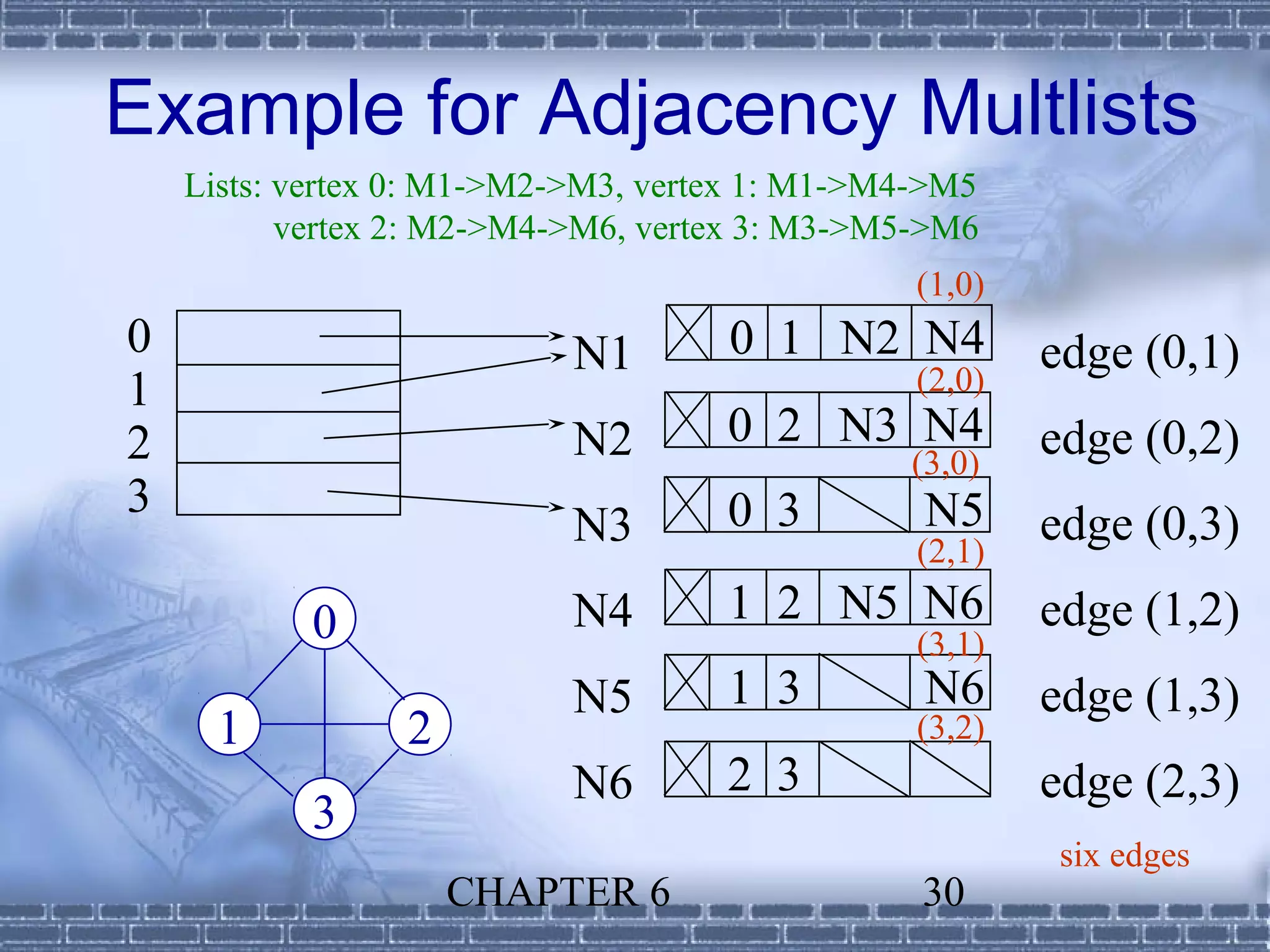
Examples of adjacency multilists show how shared edges and relationships between vertices are represented.
Overview of common graph operations like traversal, DFS, BFS, and connected components exploration.
Depth-first search algorithm is illustrated with examples using adjacency lists.
Illustrates the breadth-first search algorithm for traversing graphs level-wise.
Presents code snippets demonstrating breadth-first search implementation using queues.
Using DFS to identify connected components of a graph through traversal techniques.
Introduction to spanning trees and their significance in connected graphs.
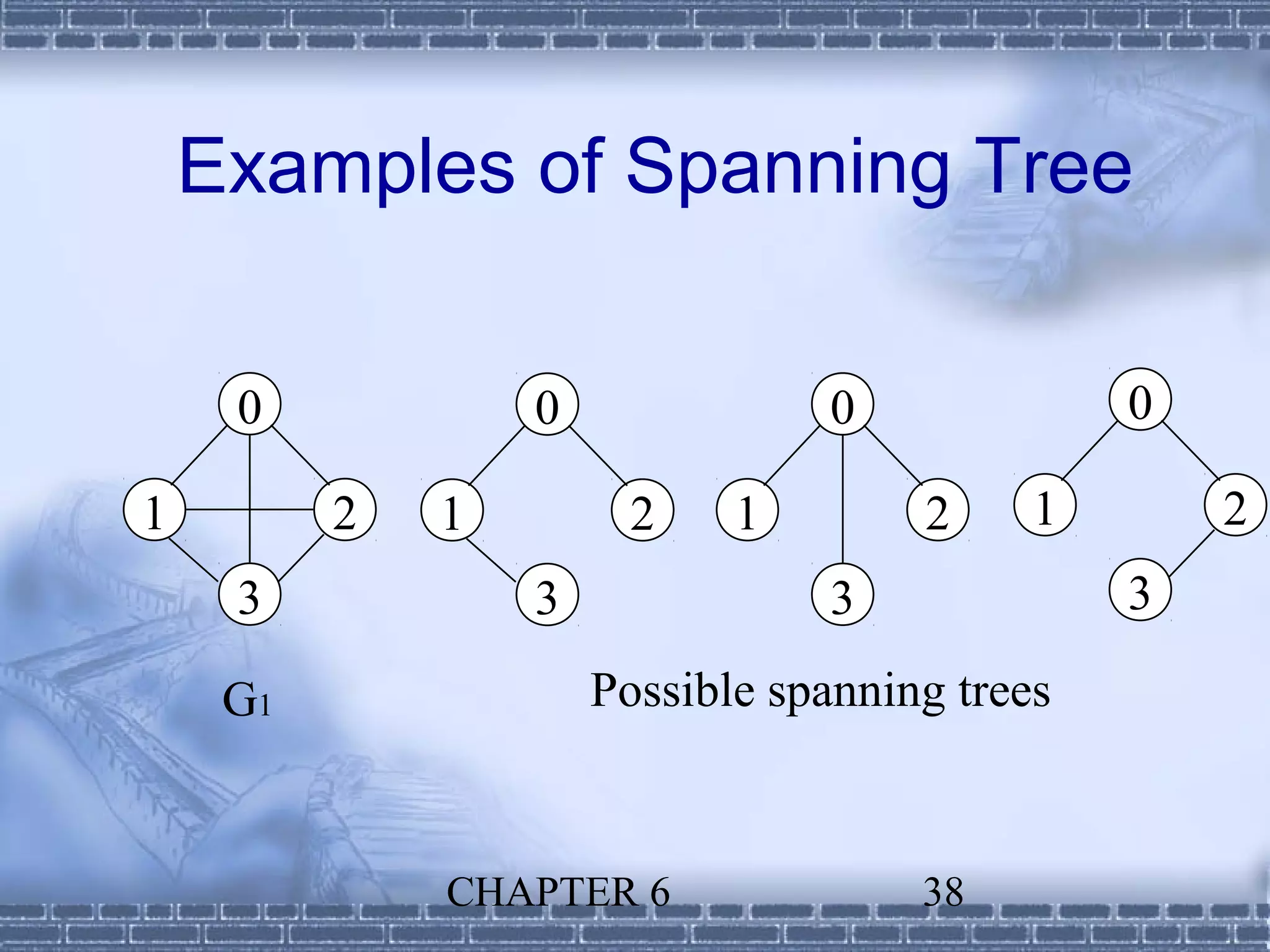
Illustrations of multiple spanning trees derived from given graphs with visual examples.
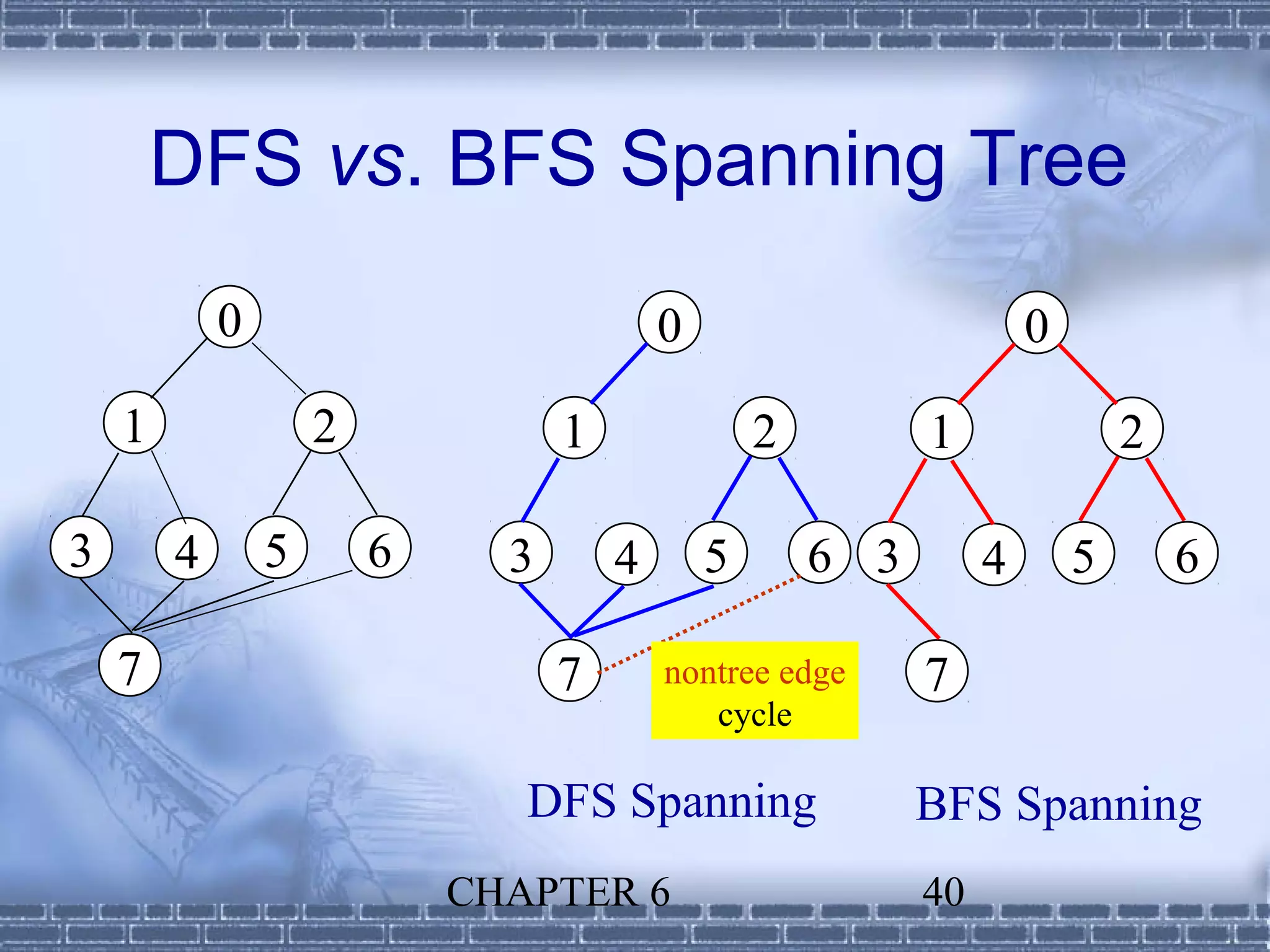
Compares spanning trees generated from depth-first and breadth-first search approaches.
Definition of arbitrary spanning trees and their relationship with connected graphs.
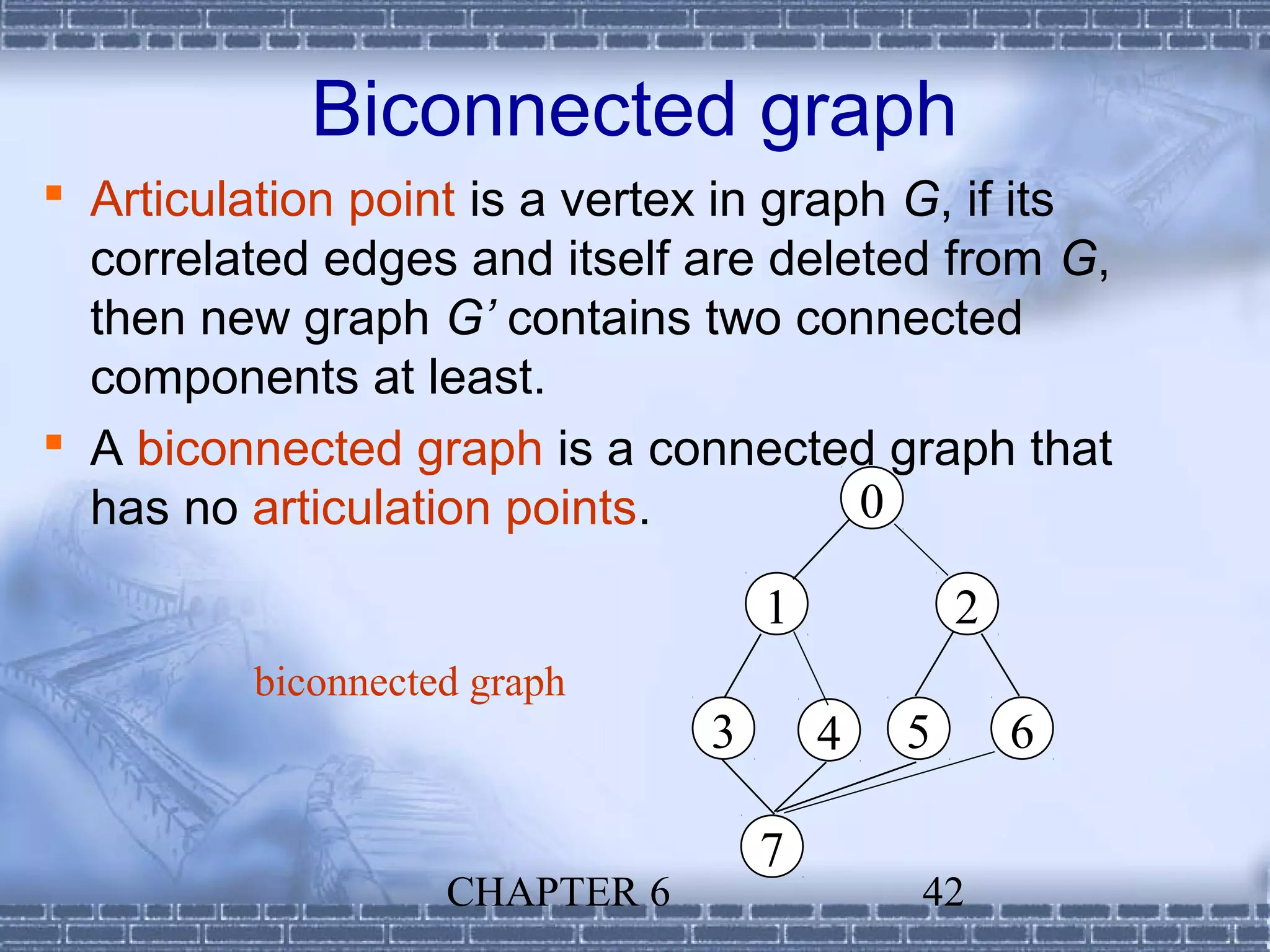
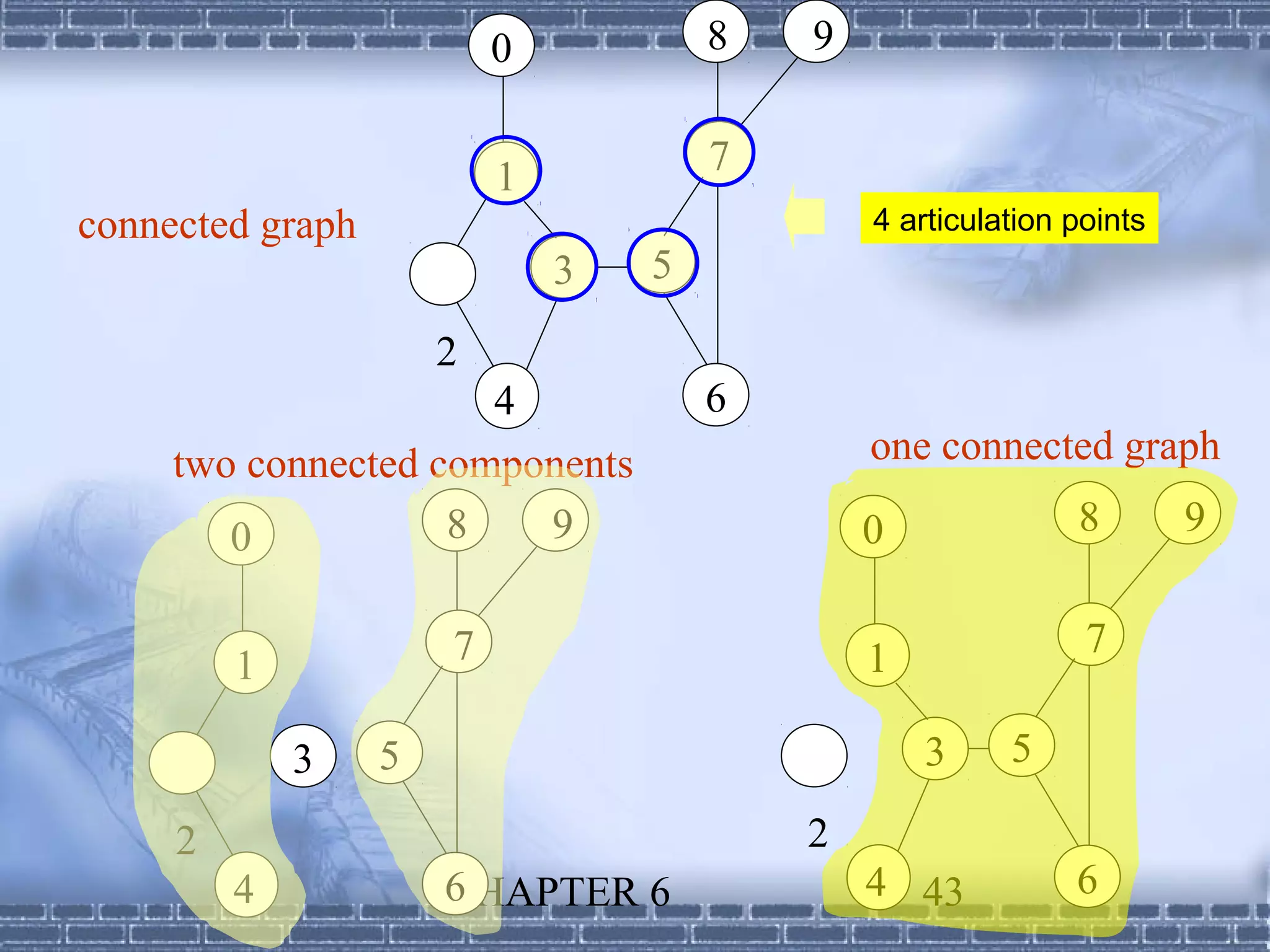
Concept of articulation points in biconnected graphs to discuss the significance of connectivity.
Visuals showing biconnected graphs and articulation points with examples.
Definition of maximal biconnected components within a connected graph is discussed.
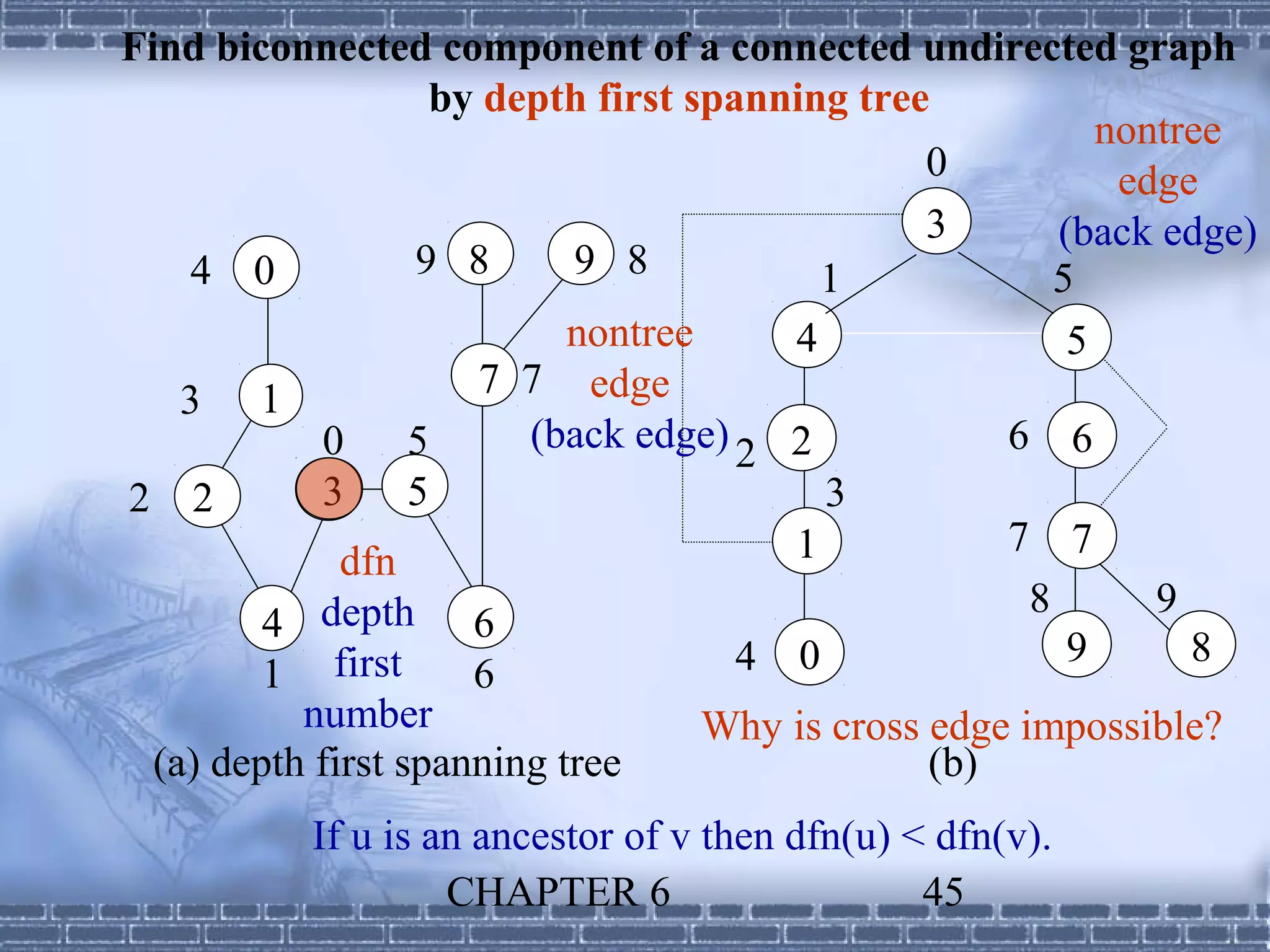
Methodology for identifying biconnected components in connected undirected graphs using DFS.
Definition and significance of minimum cost spanning trees in weighted undirected graphs.
Discusses the greedy approach applied to efficiently construct minimum spanning trees.
Detailed explanation of Kruskal's algorithm for building a minimum spanning tree.
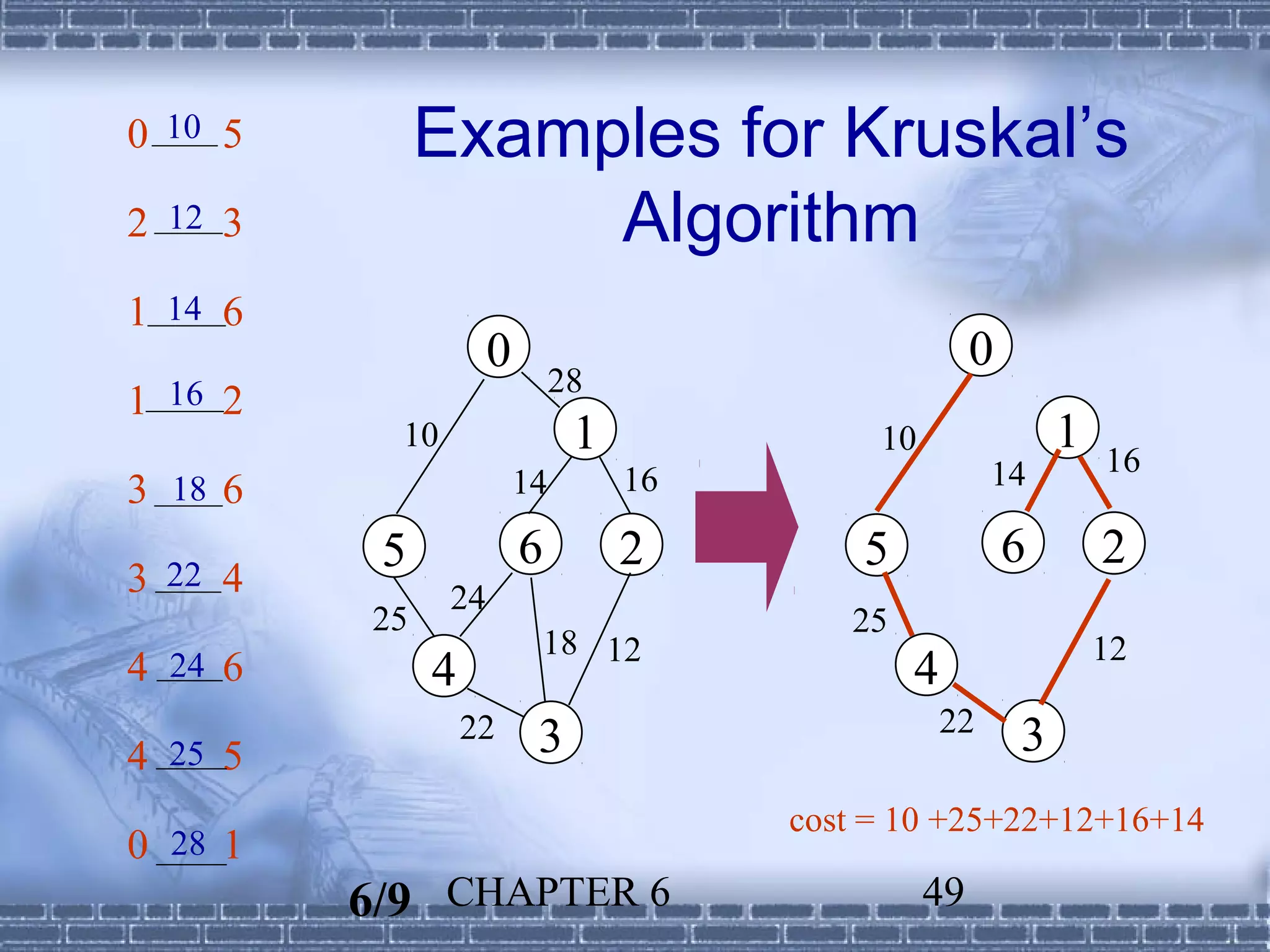
Examples illustrate the implementation of Kruskal’s algorithm with costs.
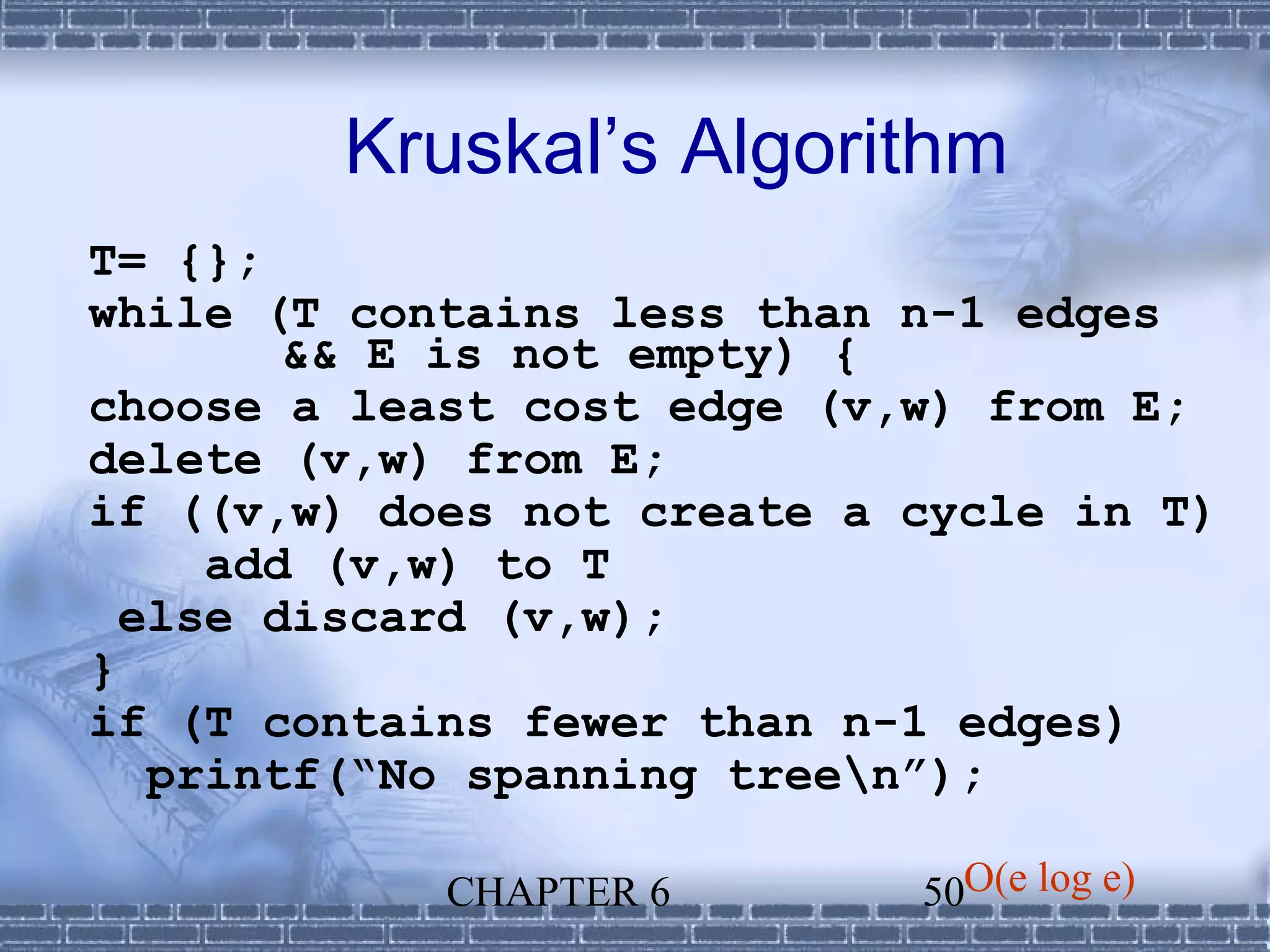
Algorithm for Kruskal's spanning tree construction is detailed with conditions for cycle elimination.
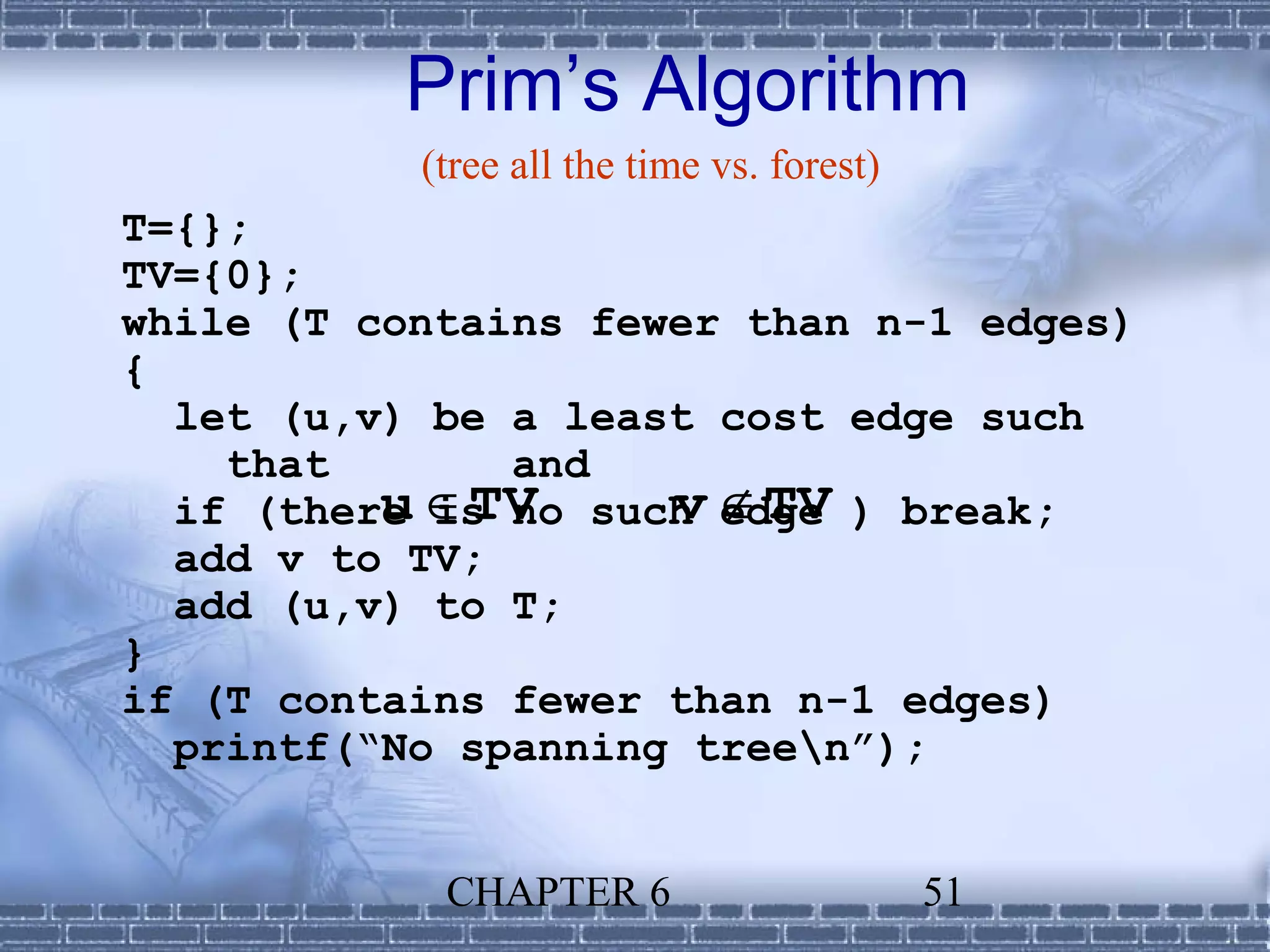
Introduction to Prim’s algorithm for constructing minimum spanning trees in graphs.
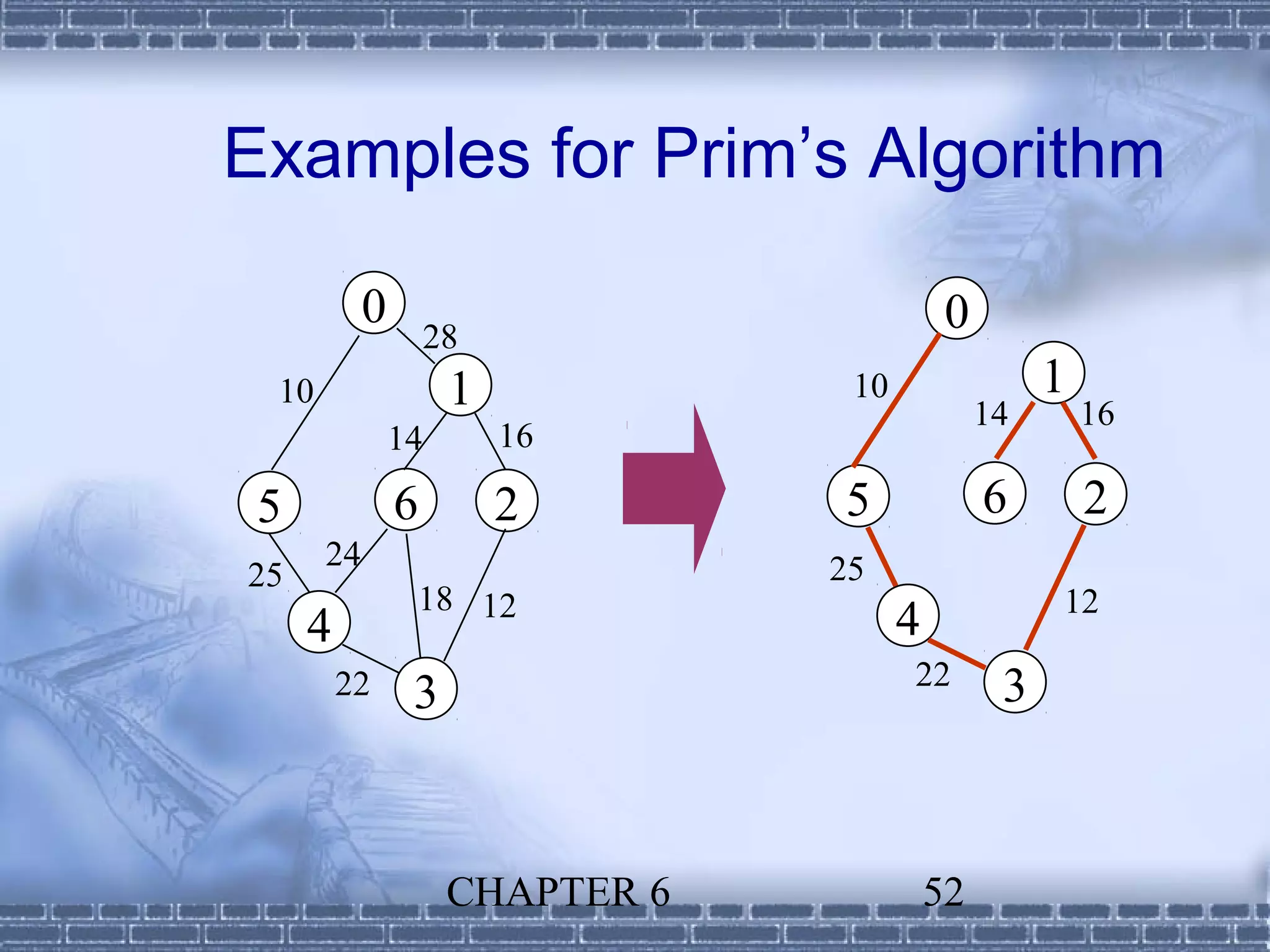
Examples provided to demonstrate the application of Prim’s algorithm in graphs.
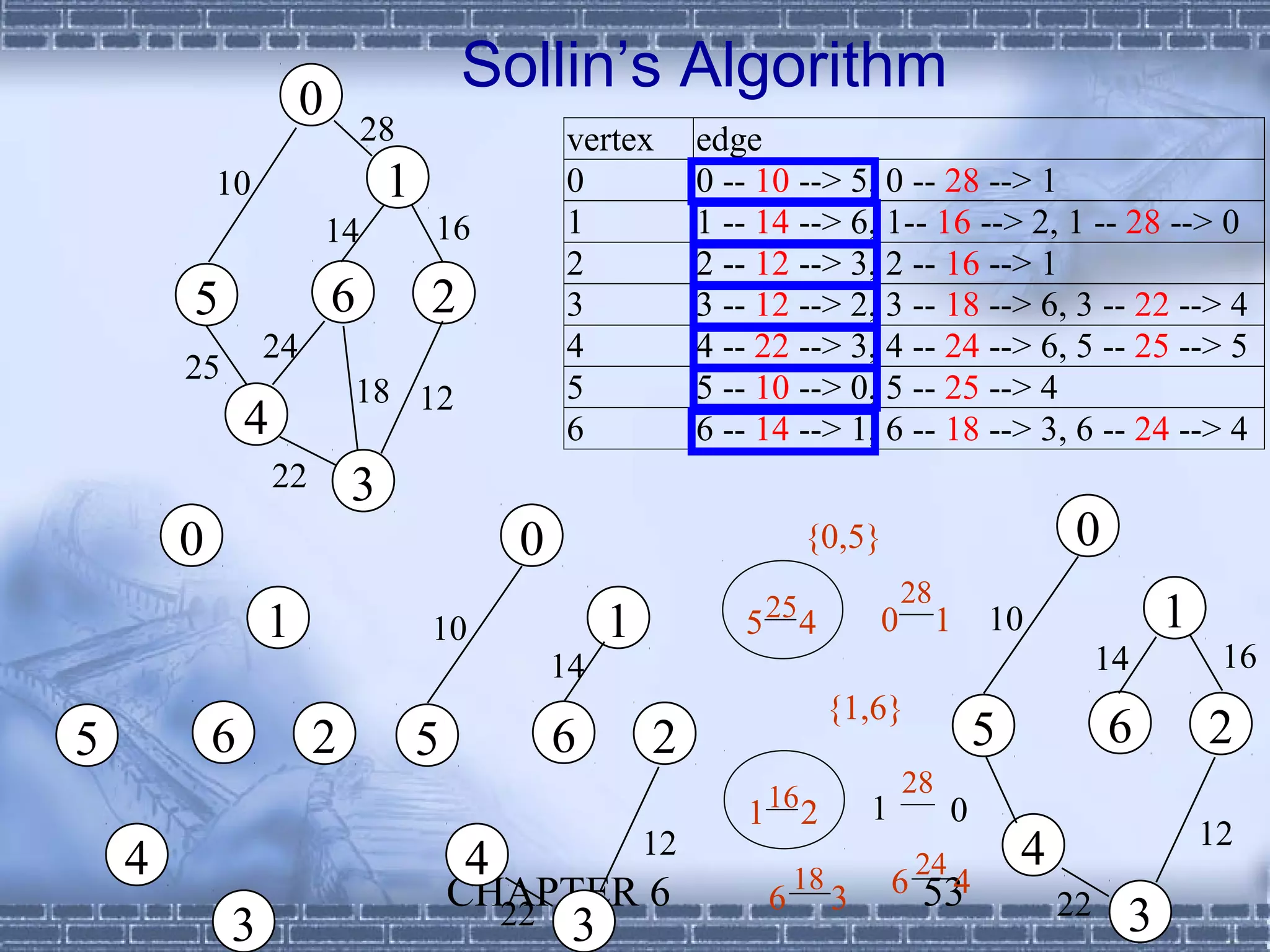
Description of Sollin’s algorithm for minimum spanning trees utilizing edge selection.
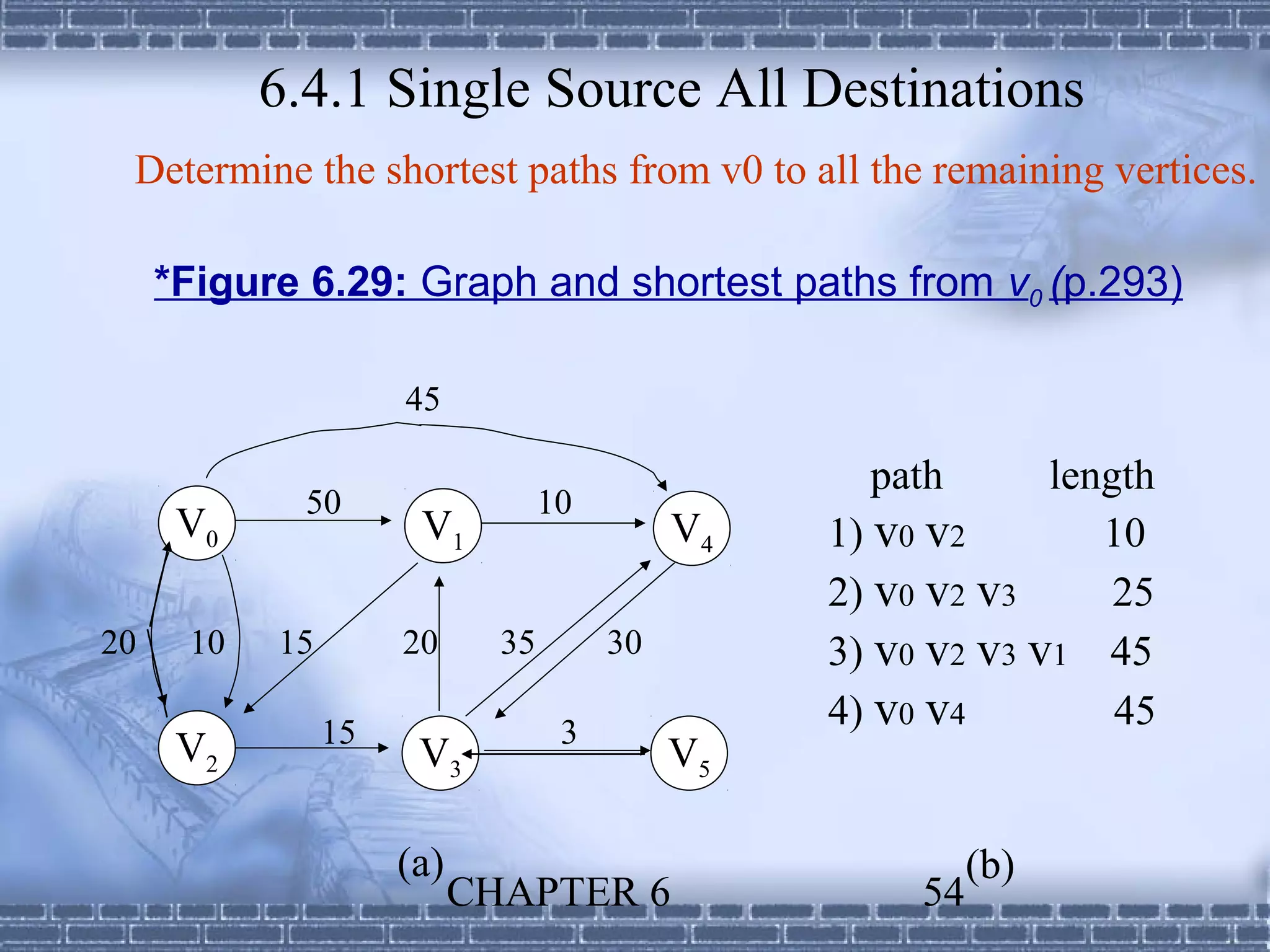
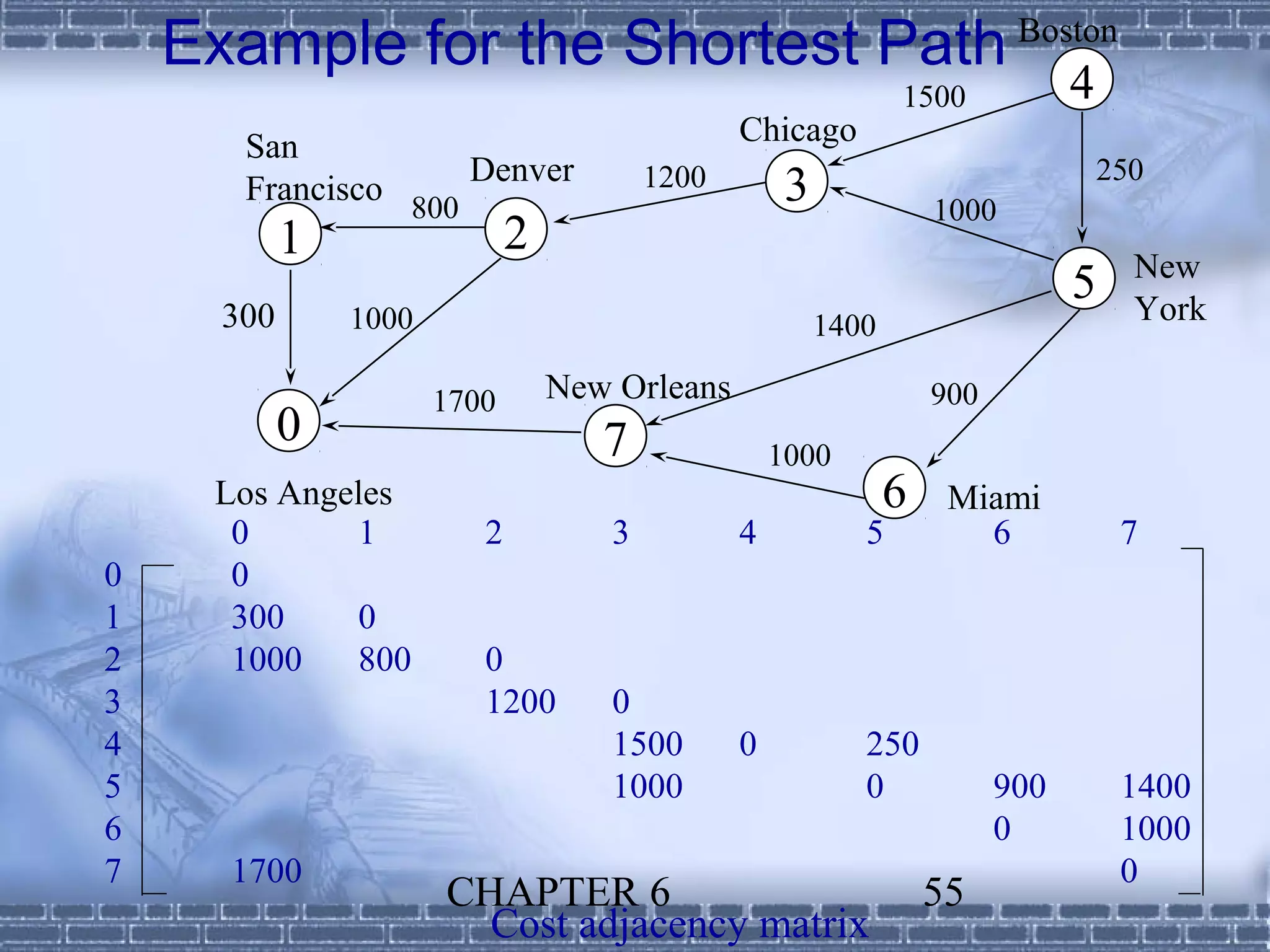
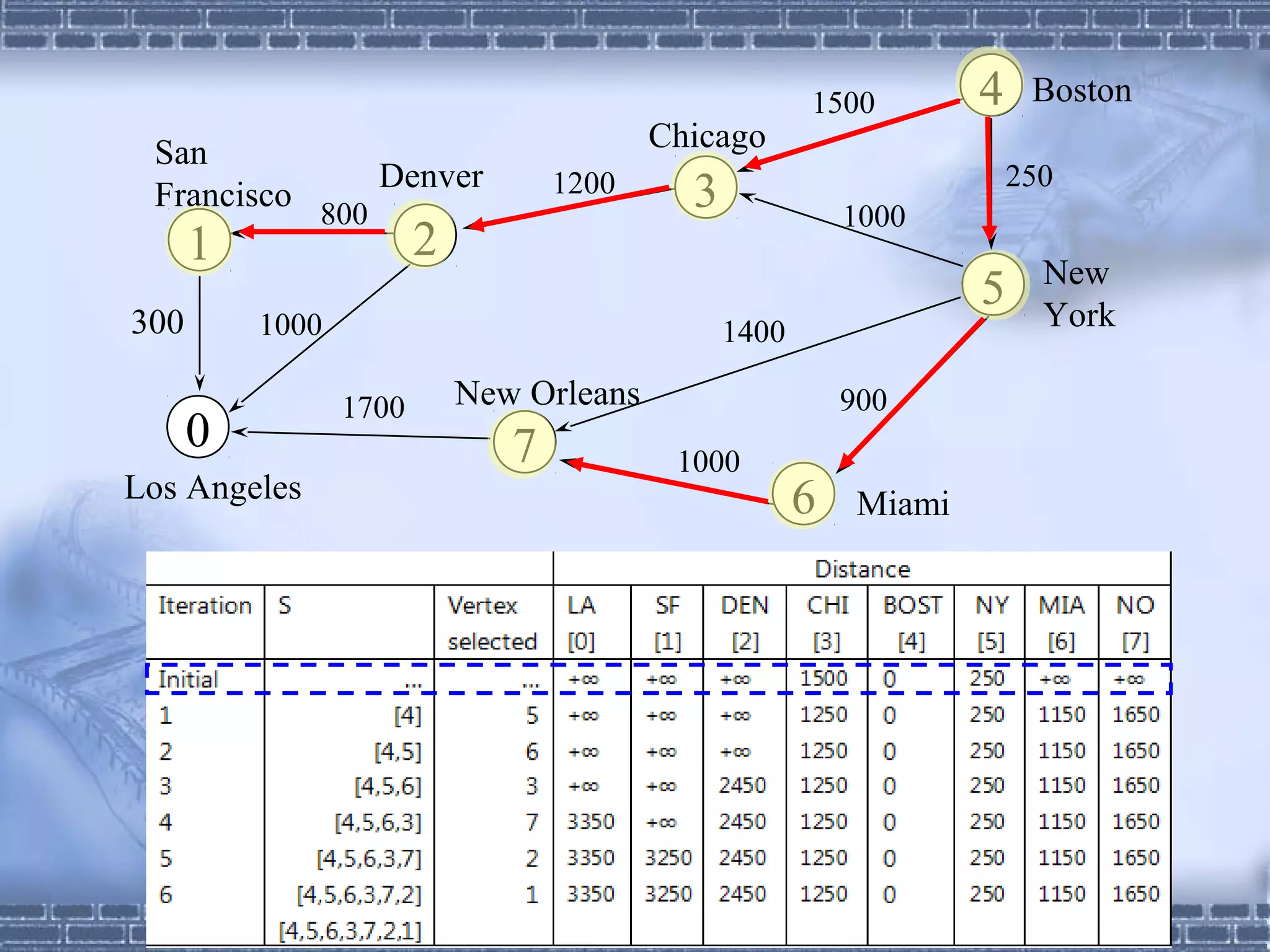
Methodology to determine shortest paths from a single vertex to all others in the graph.
Case study demonstrating the shortest path through various city locations with distances.
Definition of data structures required for implementing shortest path algorithms.
Implementation details of a function to calculate shortest paths from a defined source.
Strategies to compute shortest paths between all pairs of vertices are outlined.
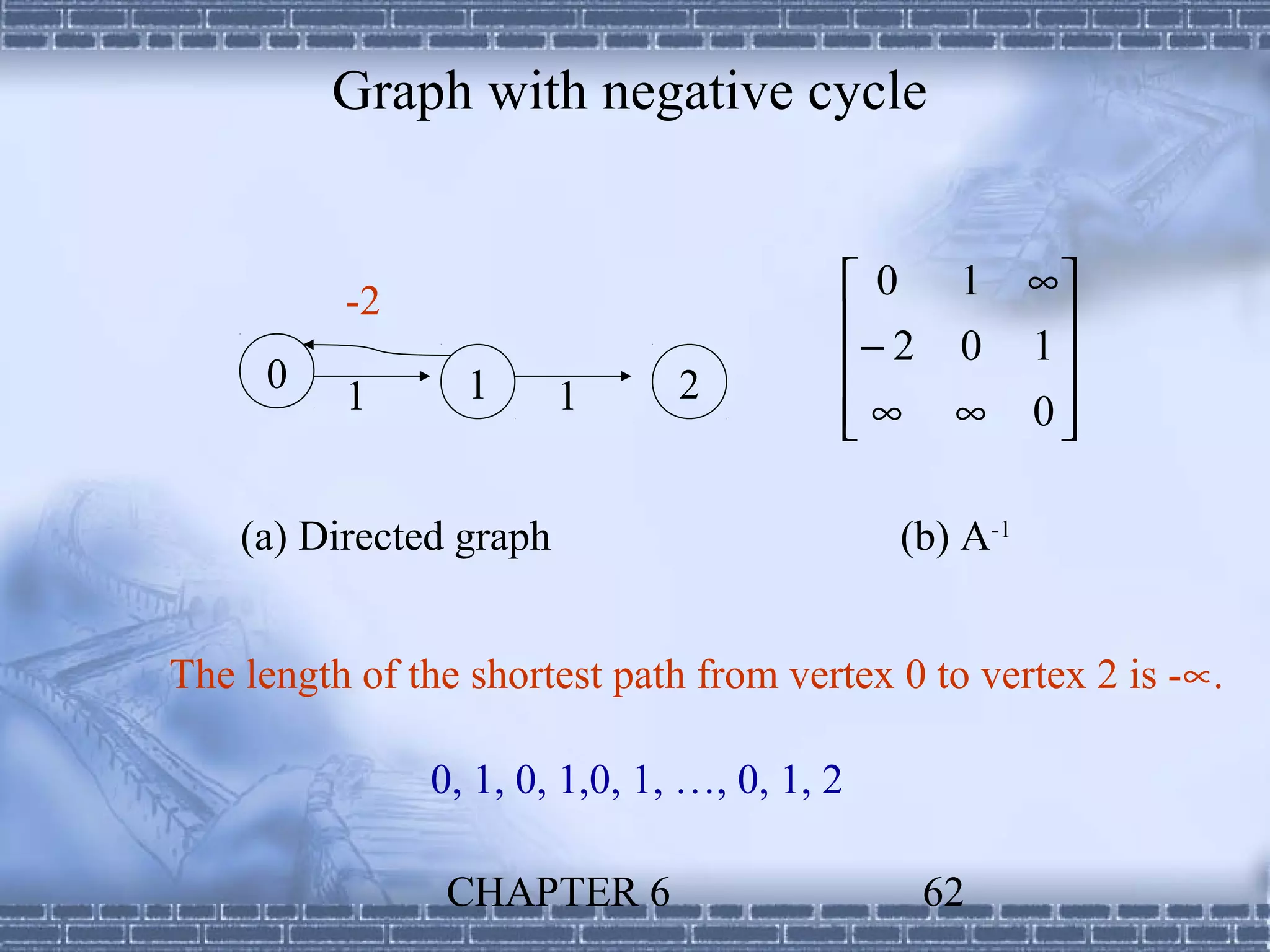
Discussion on directed graphs with negative cycles and implications for shortest paths.
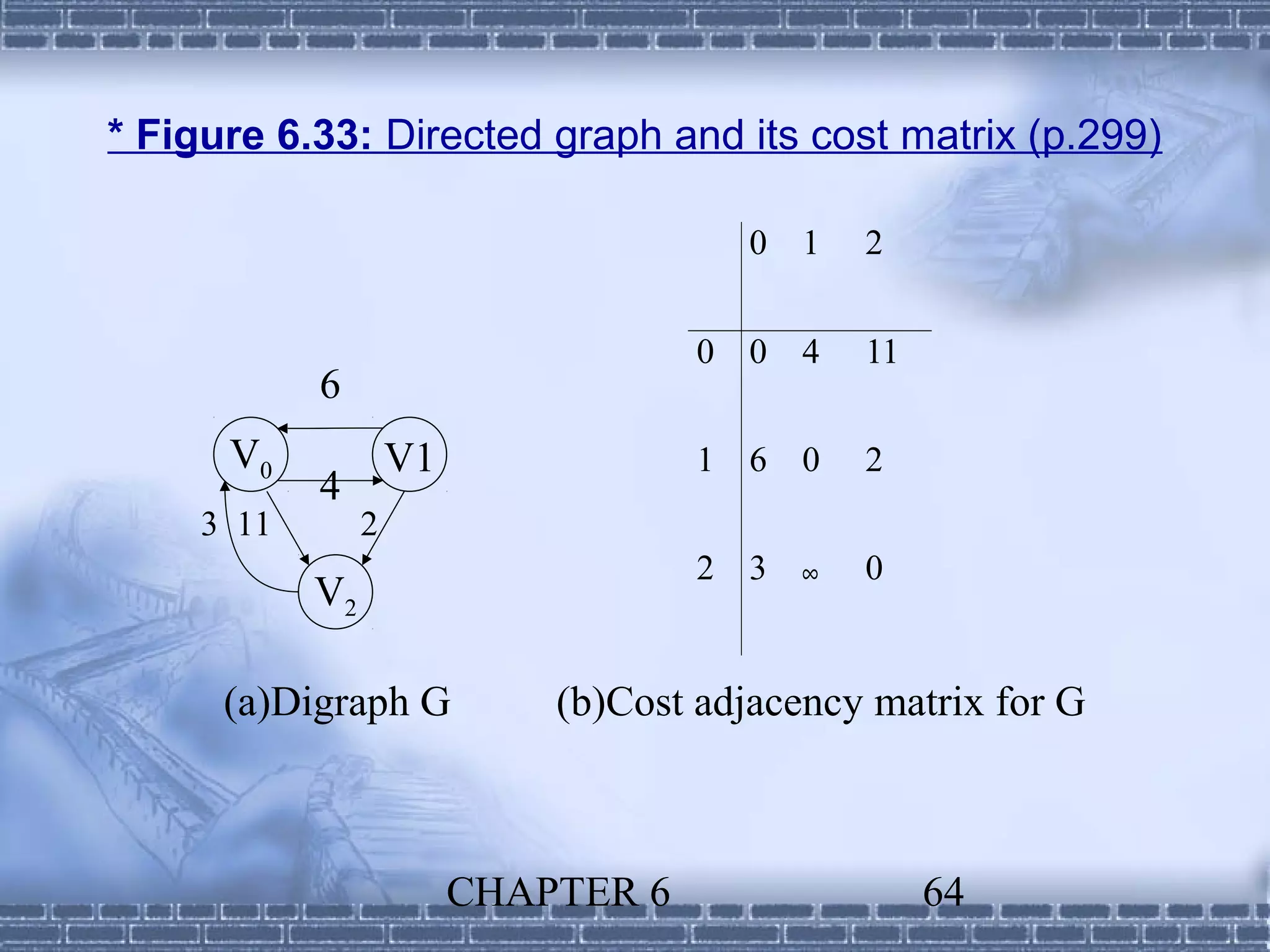
Algorithm for calculating all pairs shortest paths using iterative cost matrix updates.
Graphical representation of cost adjacency matrices demonstrating path lengths.
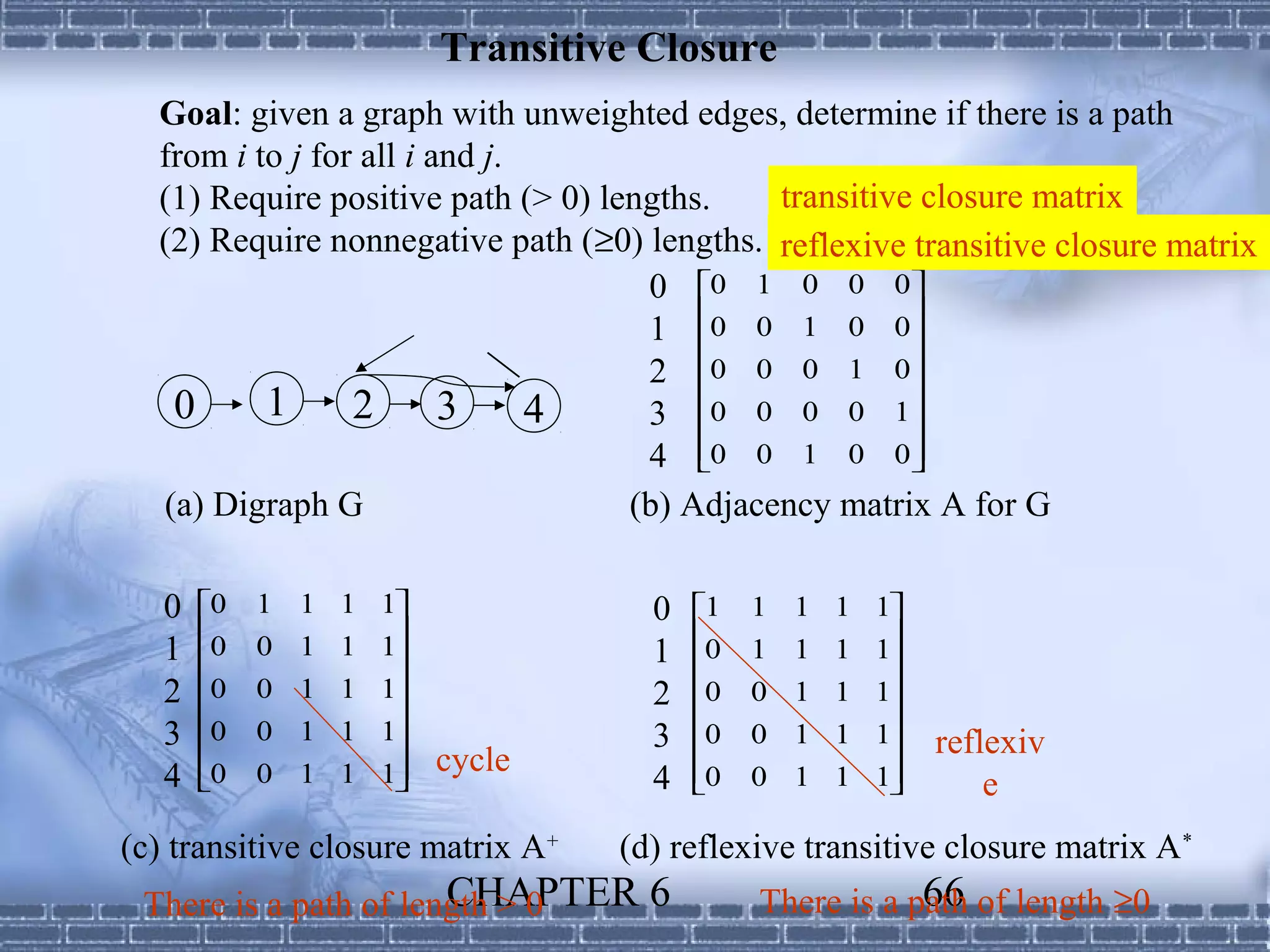
Definition of transitive closure for graphs to determine path existence between vertices.
Defines AOV networks with vertices representing tasks and edges showing precedence relations.
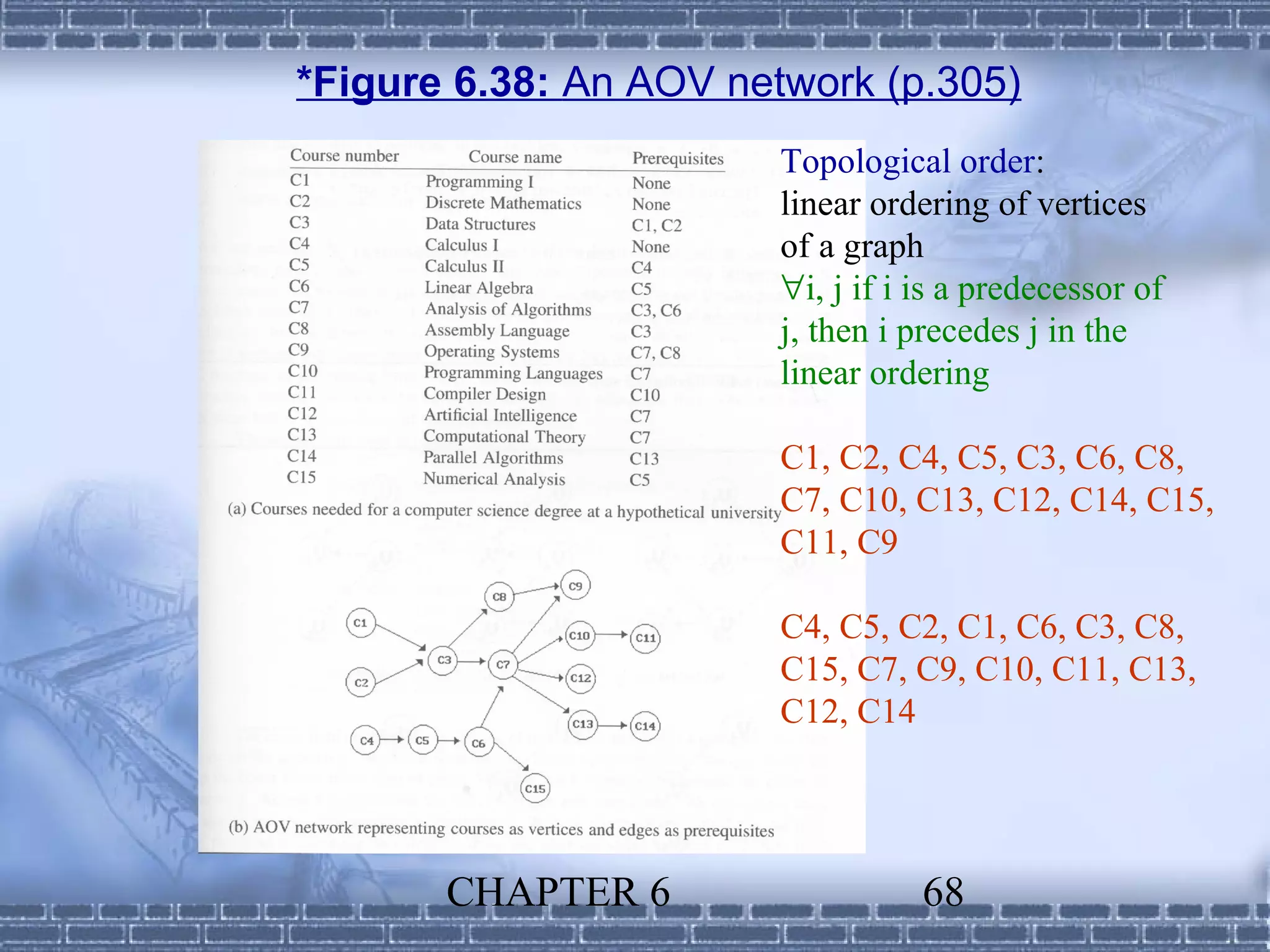
Topological order and linear vertex arrangement examples showcased in AOV networks.
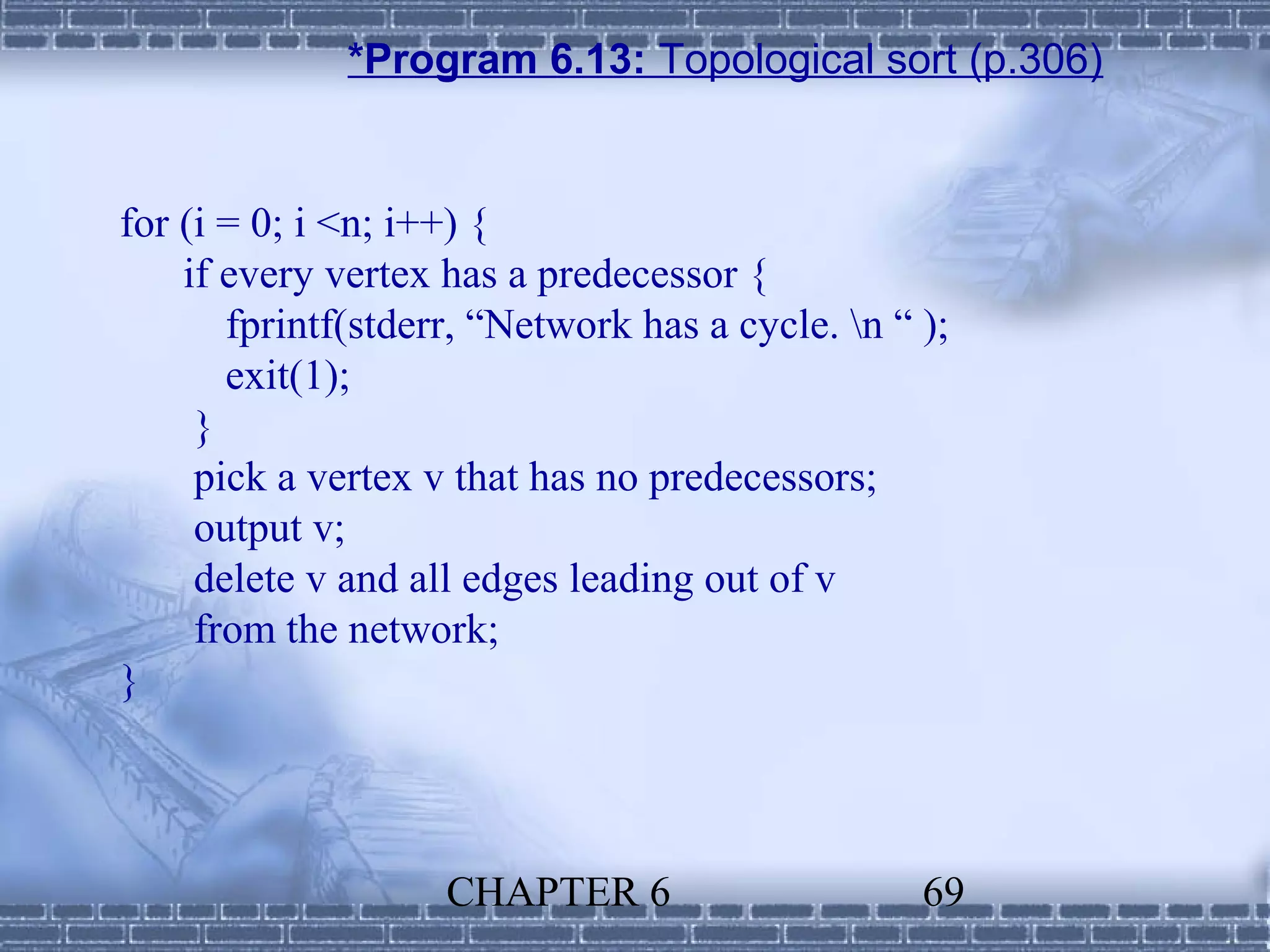
Program structure for performing topological sorting on AOV networks is presented.
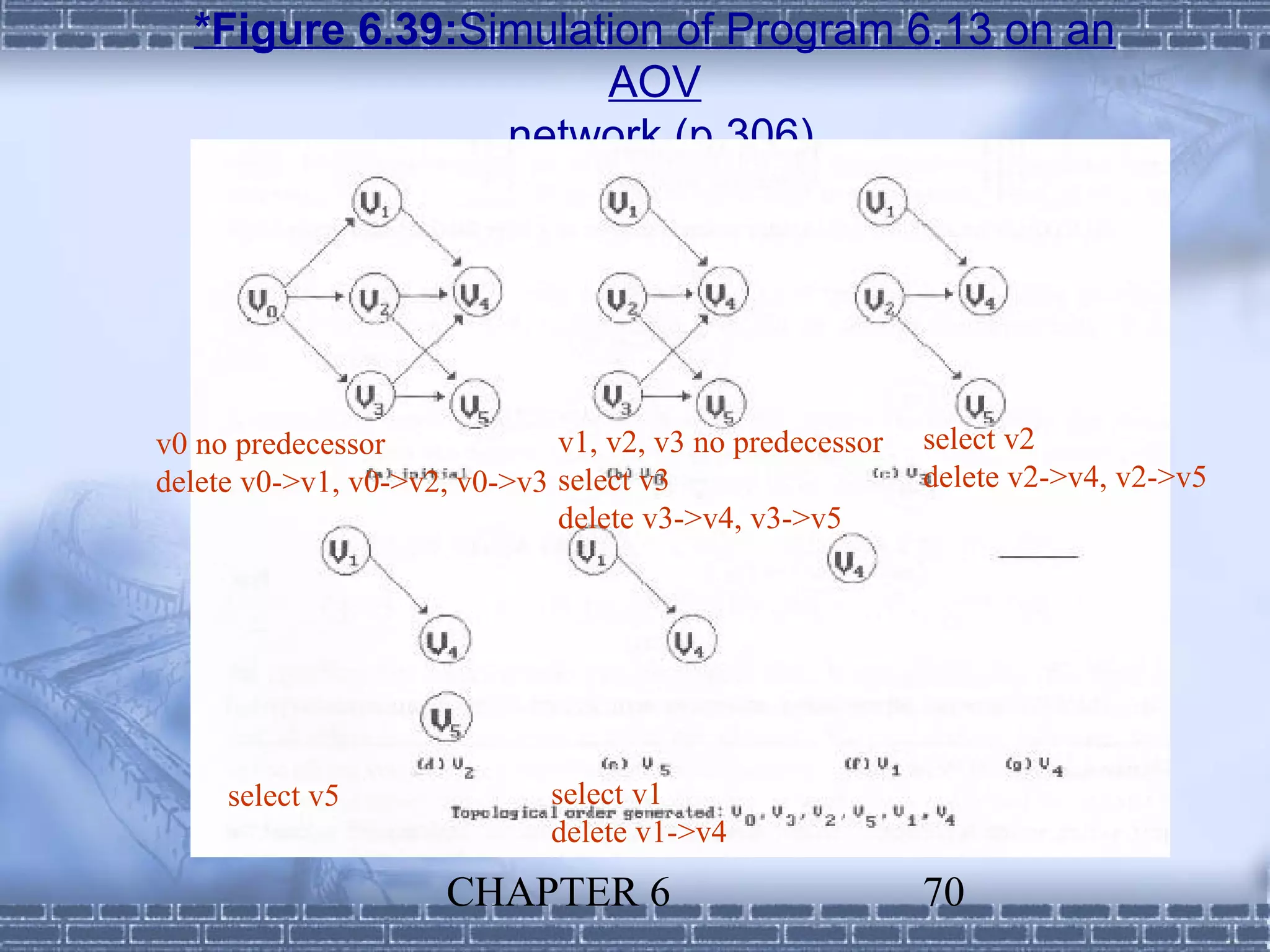
Illustration of a simulation showing selection and deletion of vertices in an AOV network.
Key considerations for managing predecessor relationships and incident edges in data structures.
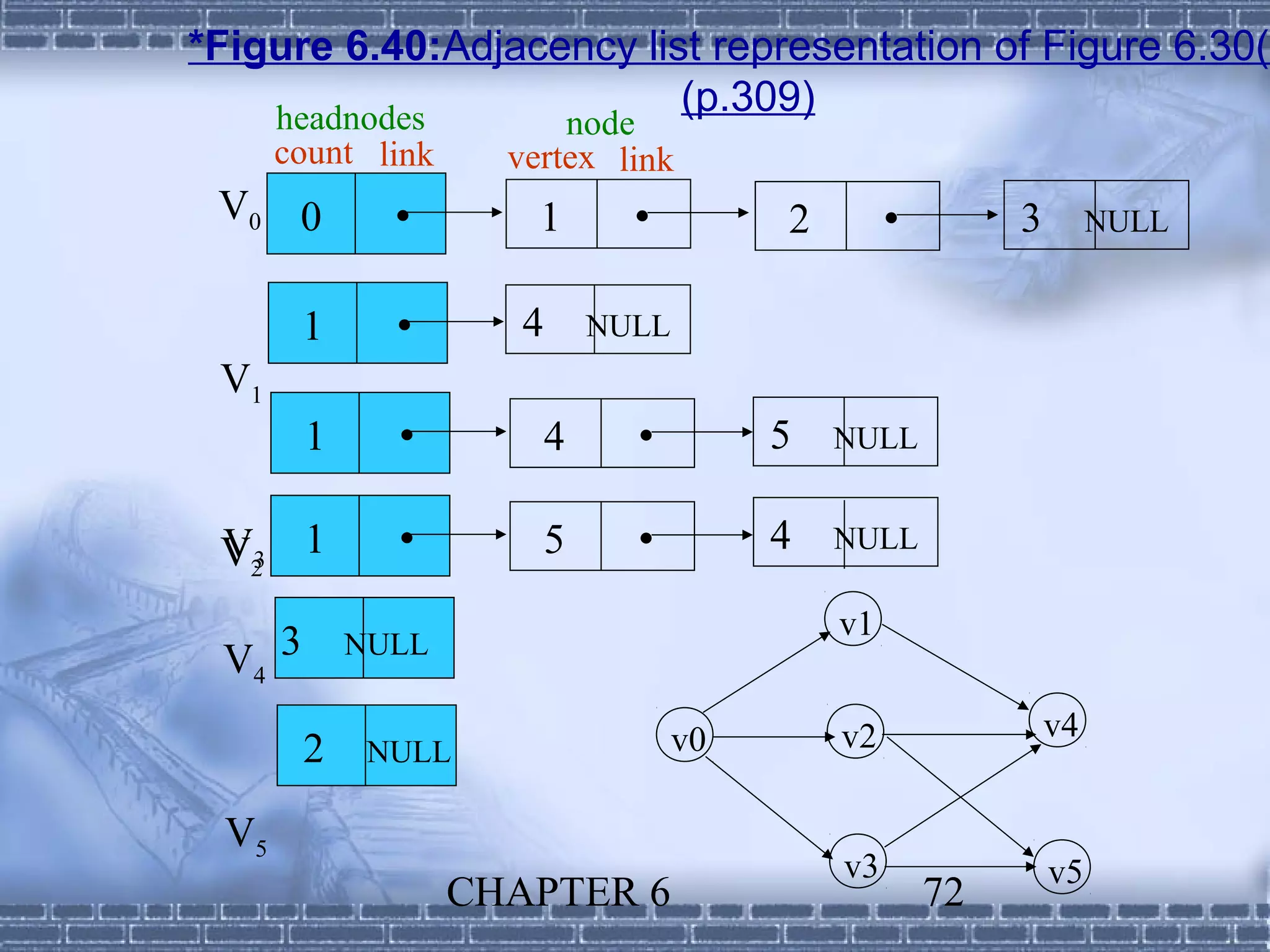
Example showcasing the adjacency list representation of a graph with task relations.
Provides structural definitions necessary for implementing AOV network sorting algorithms.
Implementation details for performing topological sort on vertices in an AOV network.
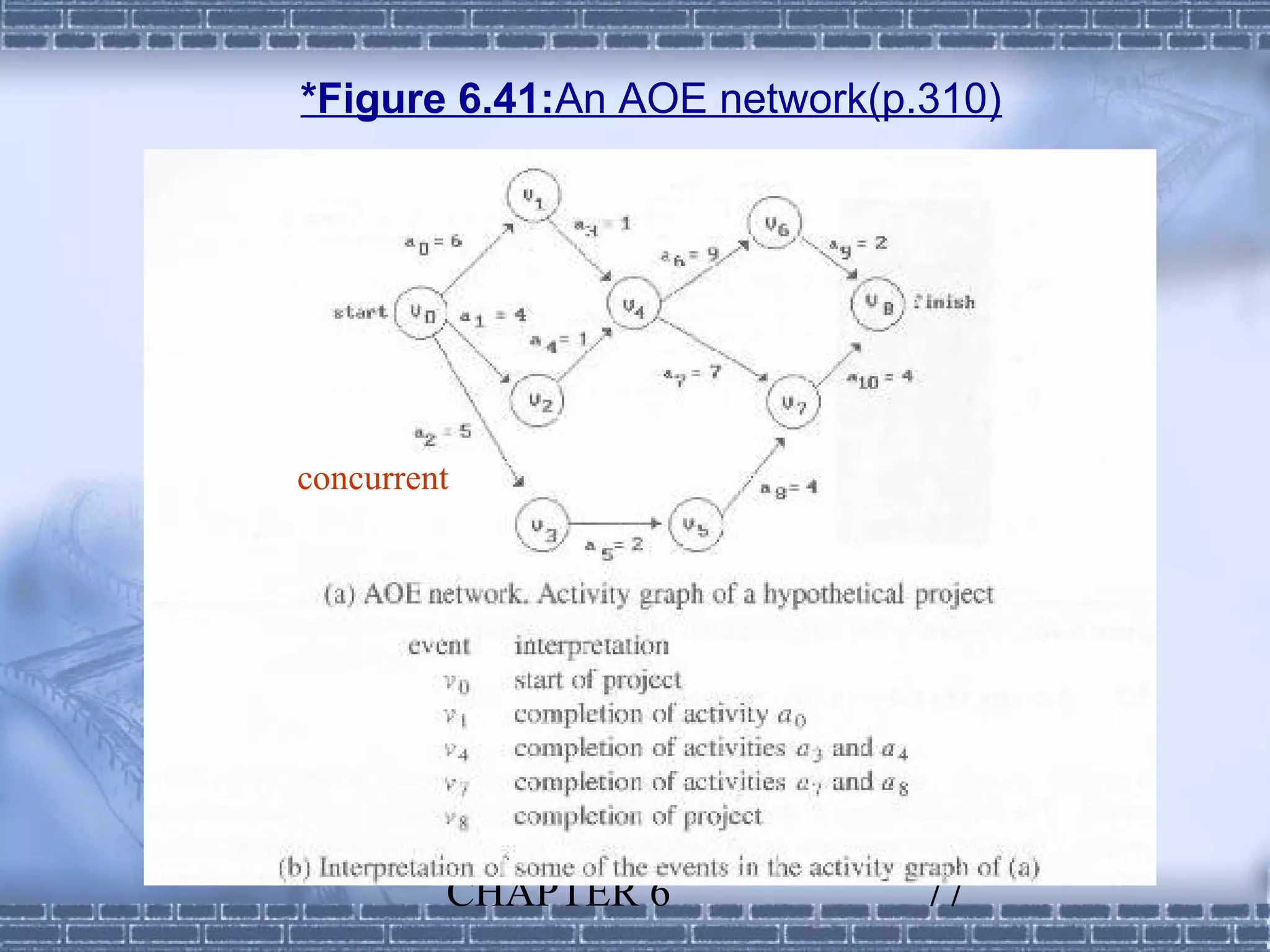
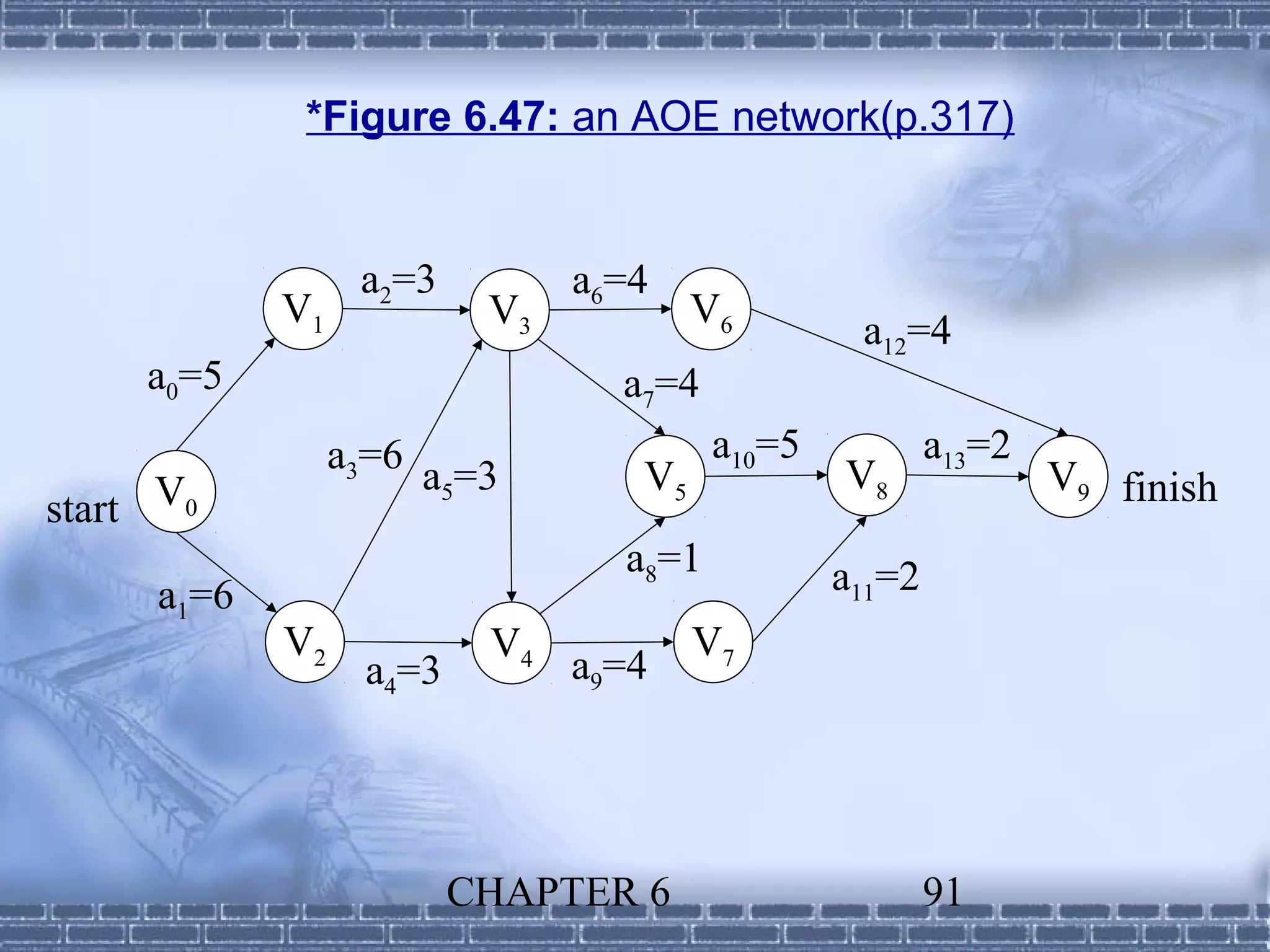
Definition and explanation of AOE networks, along with characteristics and time metrics.
Applications of AOE networks focusing on critical paths and optimal project durations.
Factors like earliest and latest events calculations influencing activity schedules are outlined.
Calculations of earliest and latest times for activities within AOE networks are defined.
Methodology for calculating earliest times using topological order in the network.
Procedure to compute latest event occurrence times through the AOE network analysis.
Final critical values computation in AOE networks for optimizing project scheduling.
Visual representation of an AOE network, demonstrating deletion of noncritical activities.





































![Data Structures - Lecture 10 [Graphs]](https://cdn.slidesharecdn.com/ss_thumbnails/datastructures-lecture10graphs-150305004608-conversion-gate01-thumbnail.jpg?width=640&height=640&fit=bounds)







































![[BDD 2025 - Mobile Development] Exploring Apple’s On-Device FoundationModels](https://cdn.slidesharecdn.com/ss_thumbnails/md-exploringappleson-devicefoundationmodels-251124030840-d690542c-thumbnail.jpg?width=640&height=640&fit=bounds)






![Support, Monitoring, Continuous Improvement & Scaling Agentic Automation [3/3]](https://cdn.slidesharecdn.com/ss_thumbnails/agenticcommunityseries-day3-cfd-251120170304-ddef8112-thumbnail.jpg?width=640&height=640&fit=bounds)



![[BDD 2025 - Full-Stack Development] The Modern Stack: Building Web & AI Appli...](https://cdn.slidesharecdn.com/ss_thumbnails/fs-themodernstackbuildingwebaiapplicationswithserverless-251124030844-388cf04f-thumbnail.jpg?width=640&height=640&fit=bounds)






![[BDD 2025 - Full-Stack Development] Digital Accessibility: Why Developers nee...](https://cdn.slidesharecdn.com/ss_thumbnails/fs-digitalaccessibilitywhydevelopersneedtoknowandcarein2025-251127011019-0674441d-thumbnail.jpg?width=640&height=640&fit=bounds)