Download to read offline
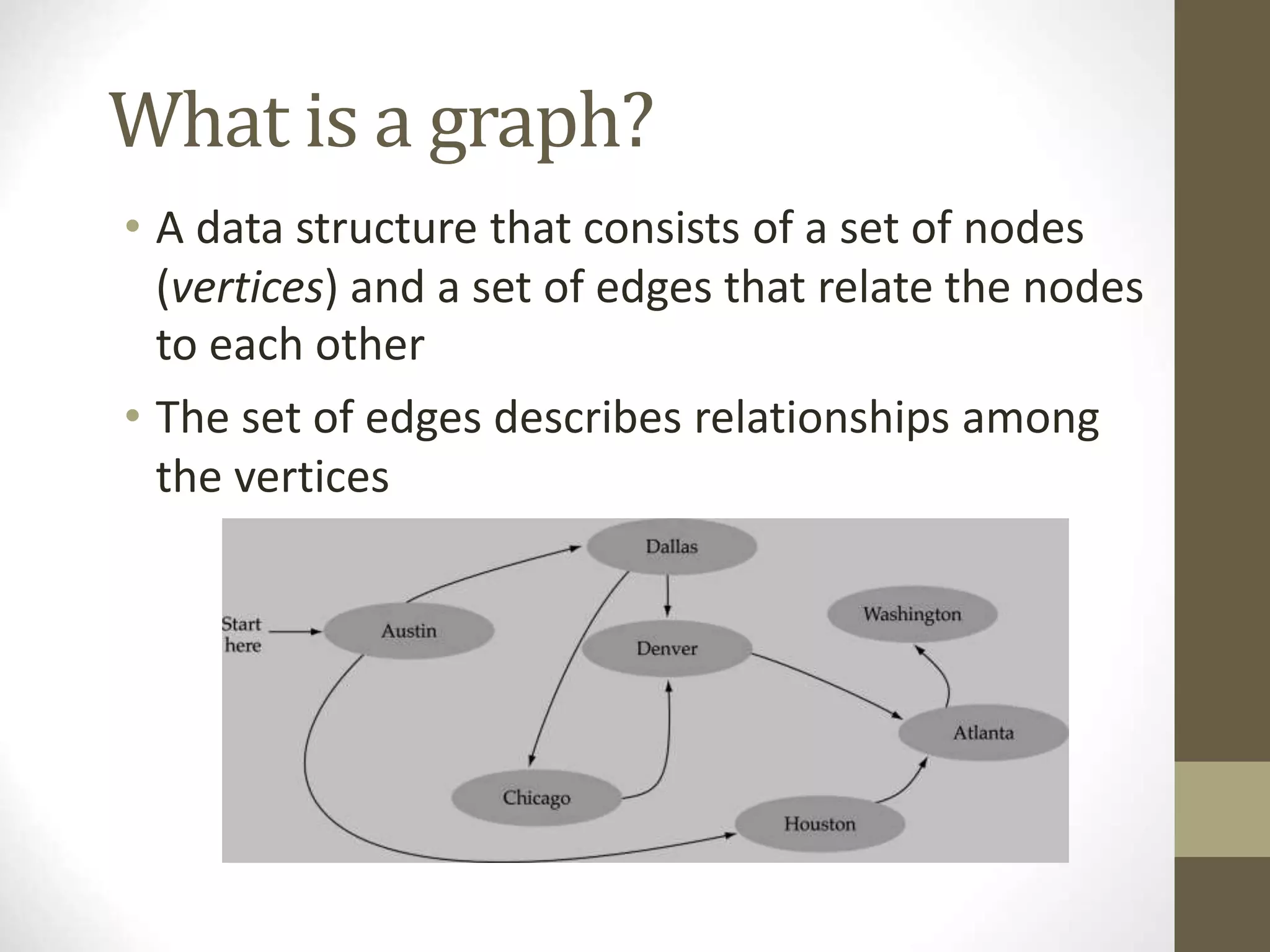
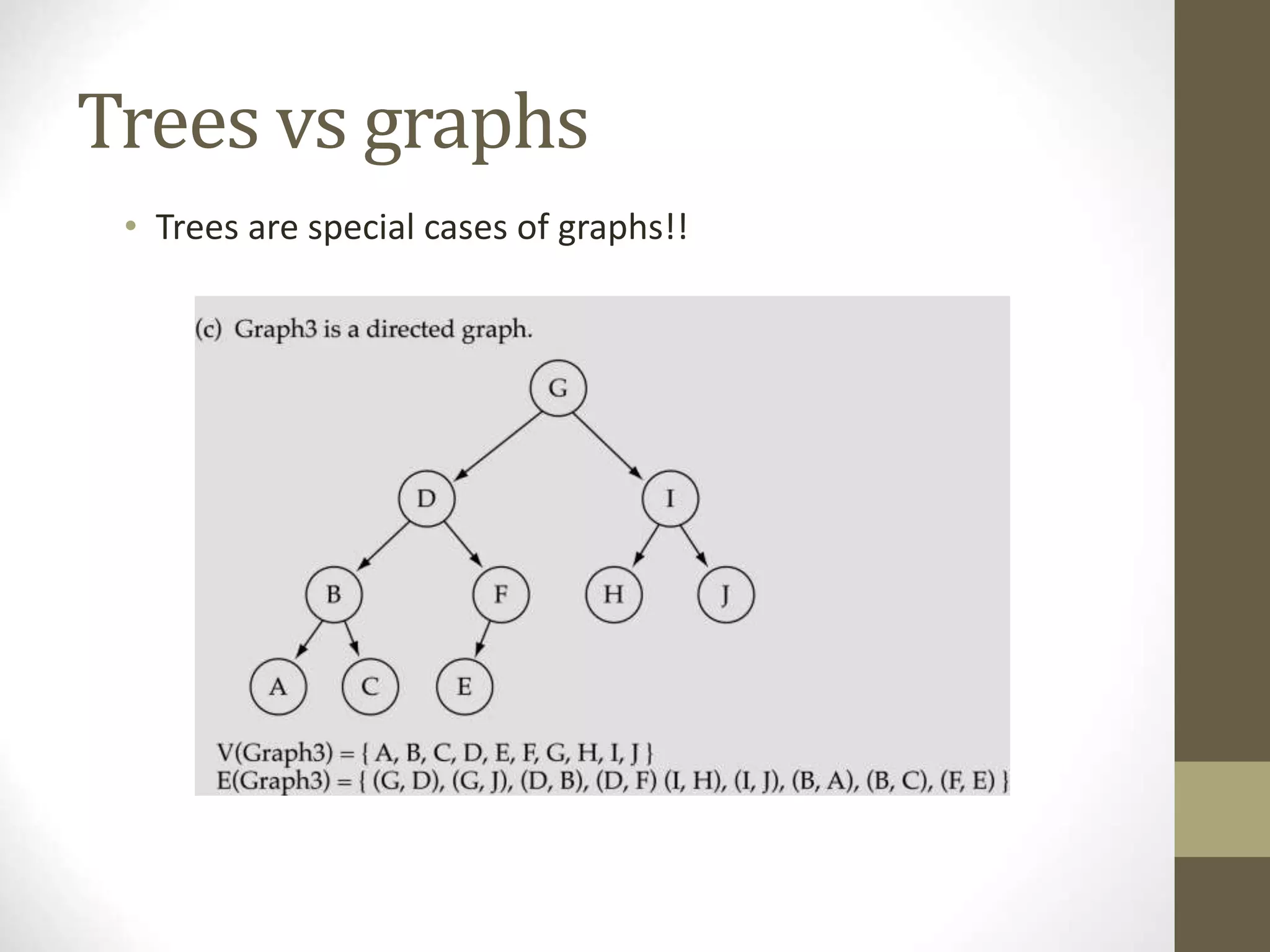
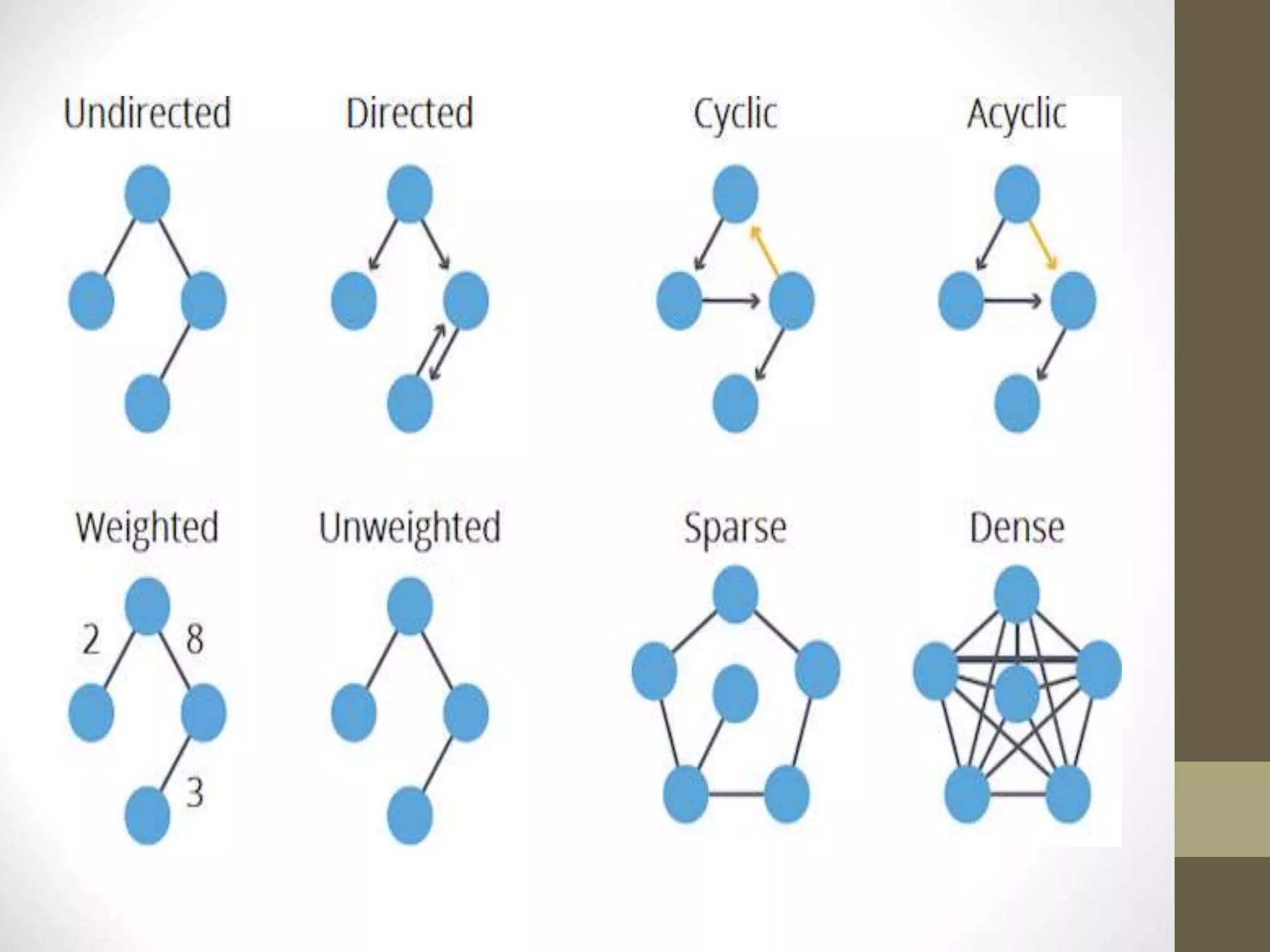
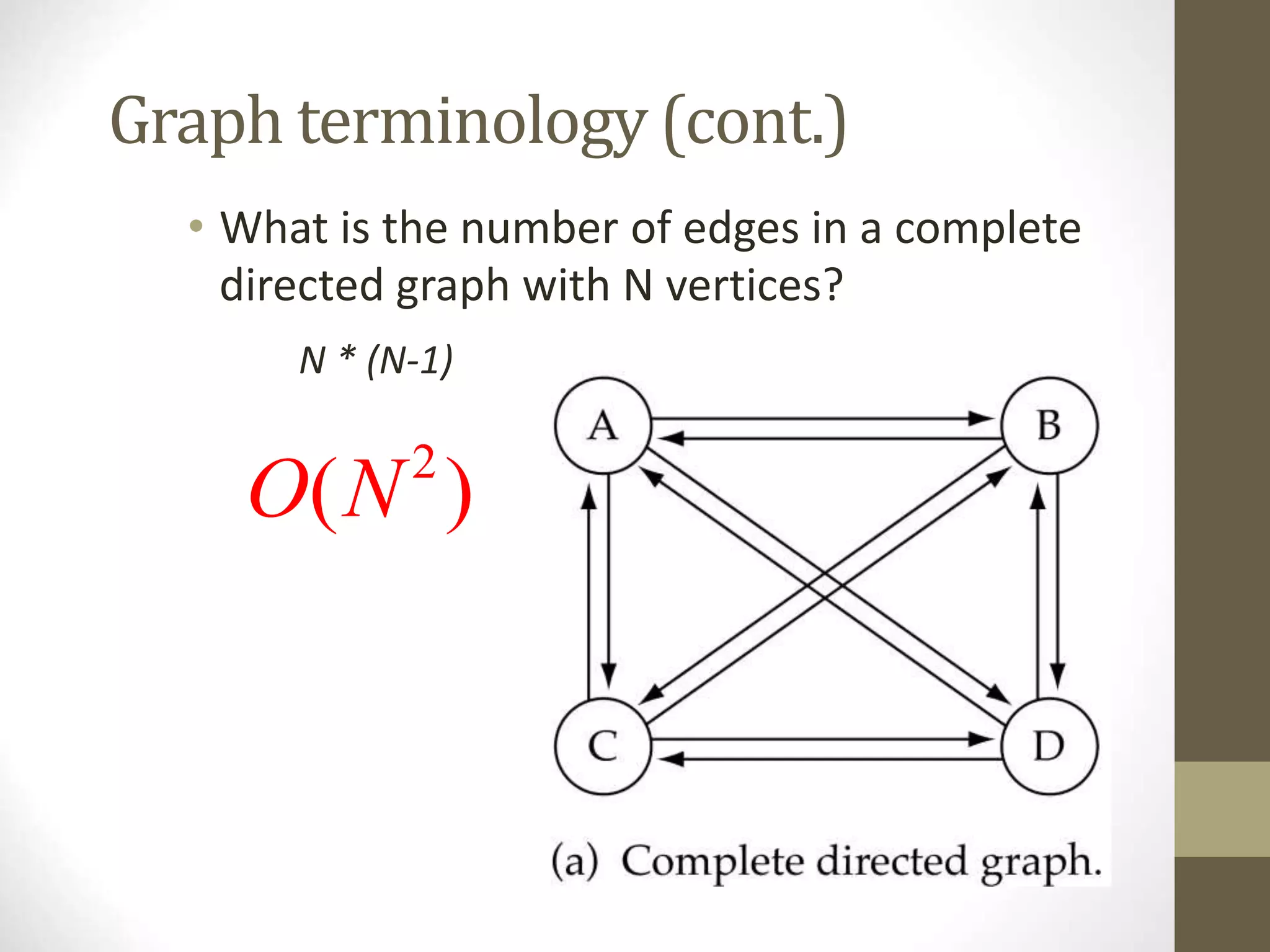
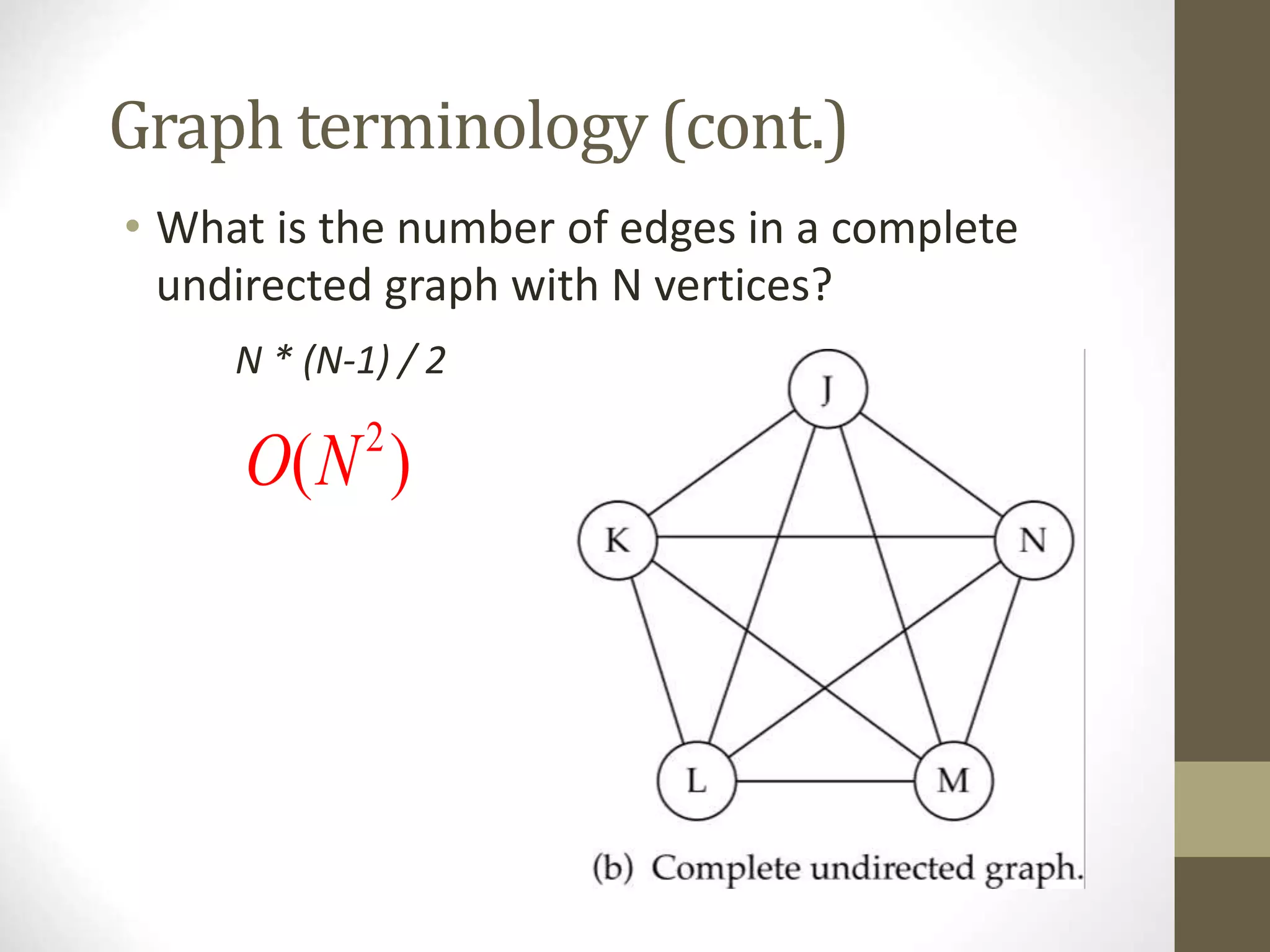
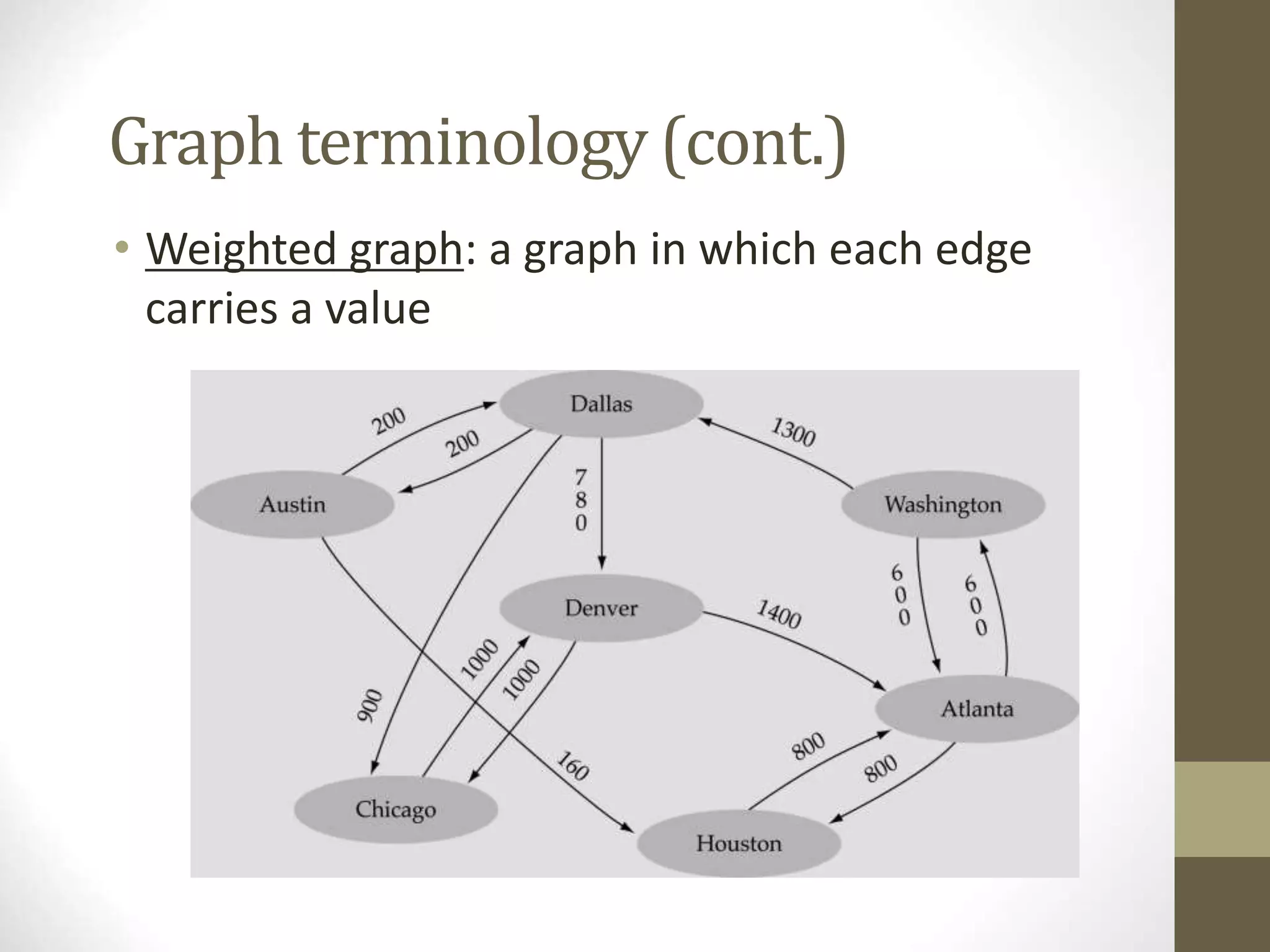
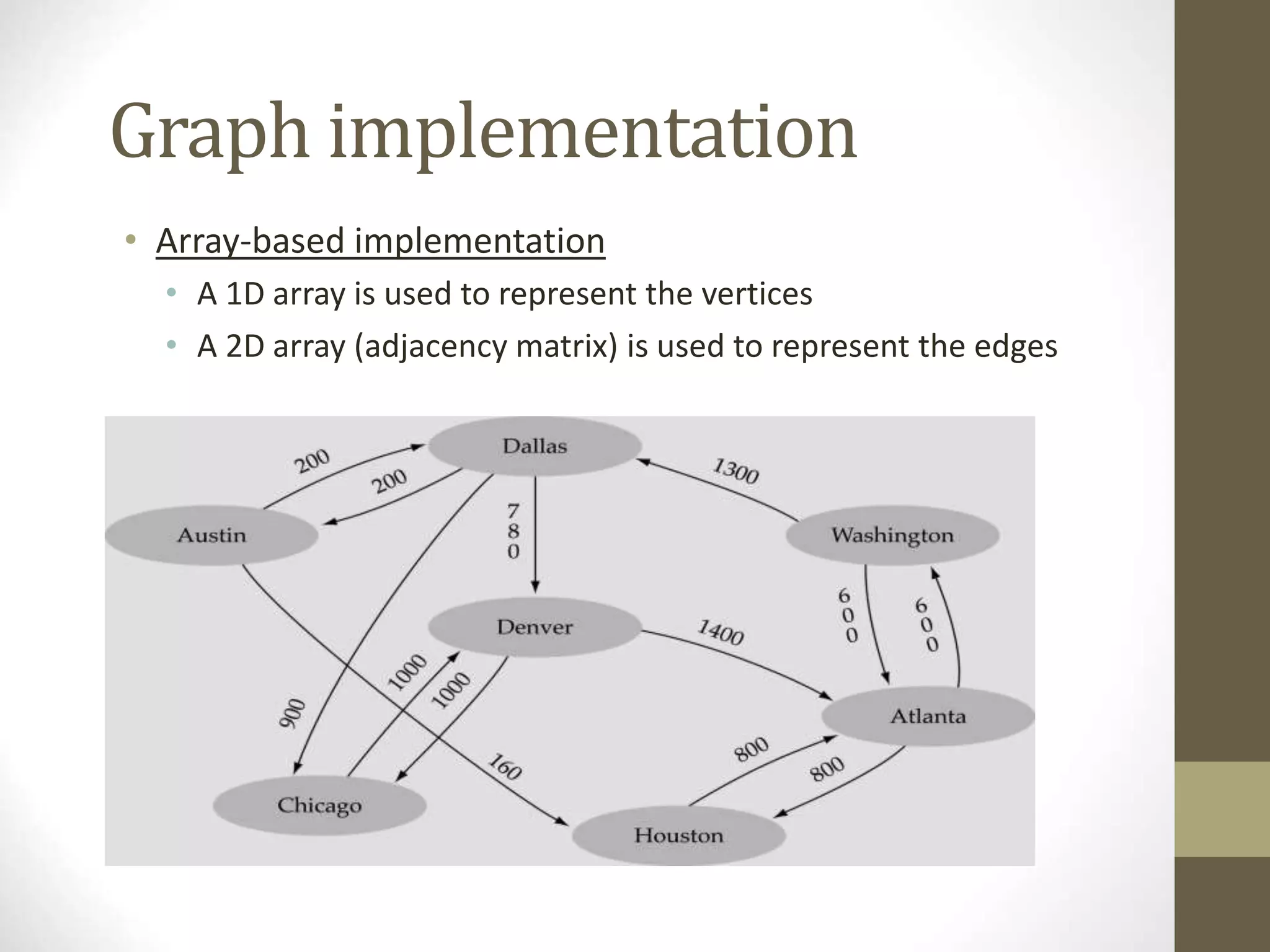
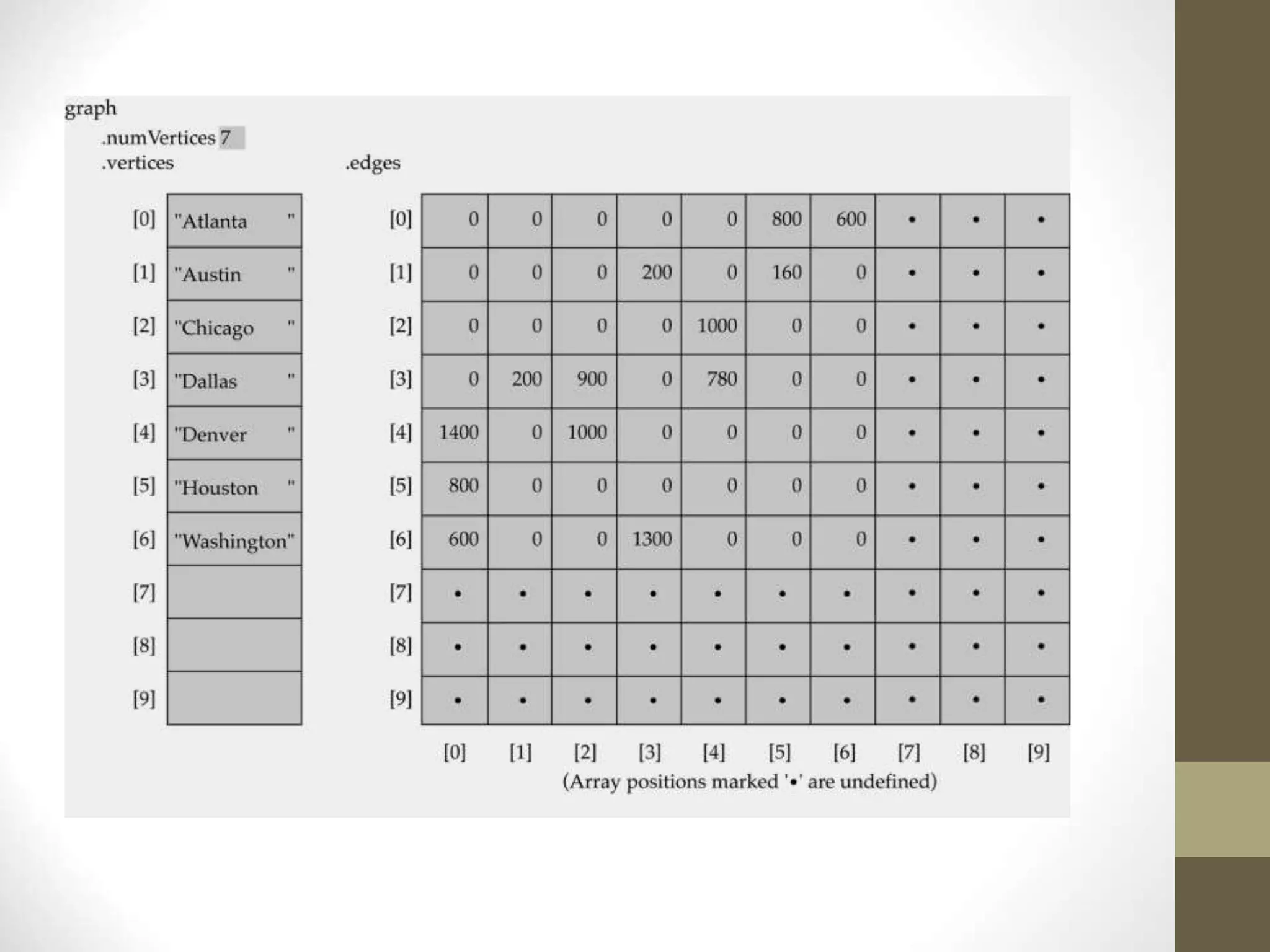
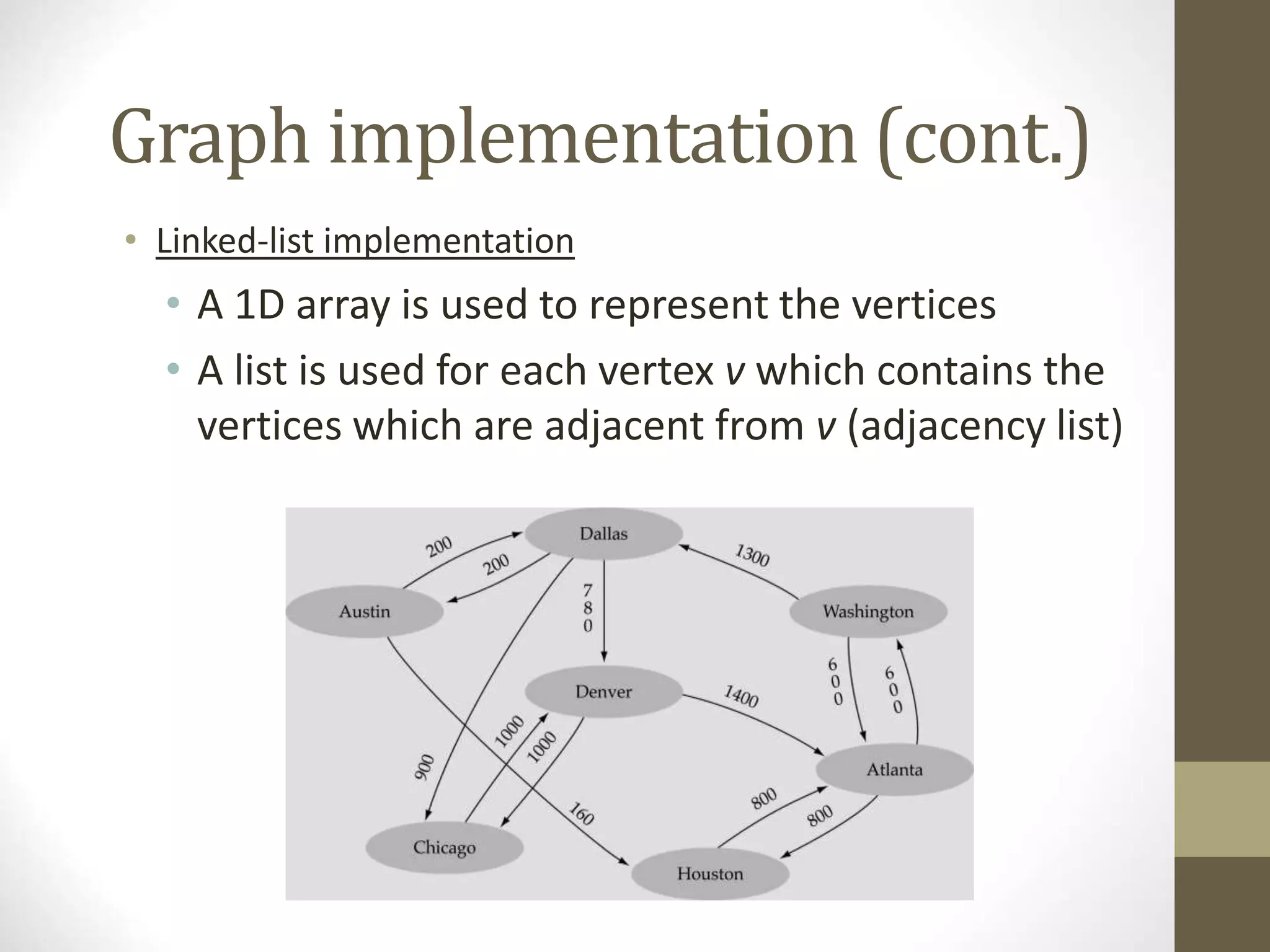
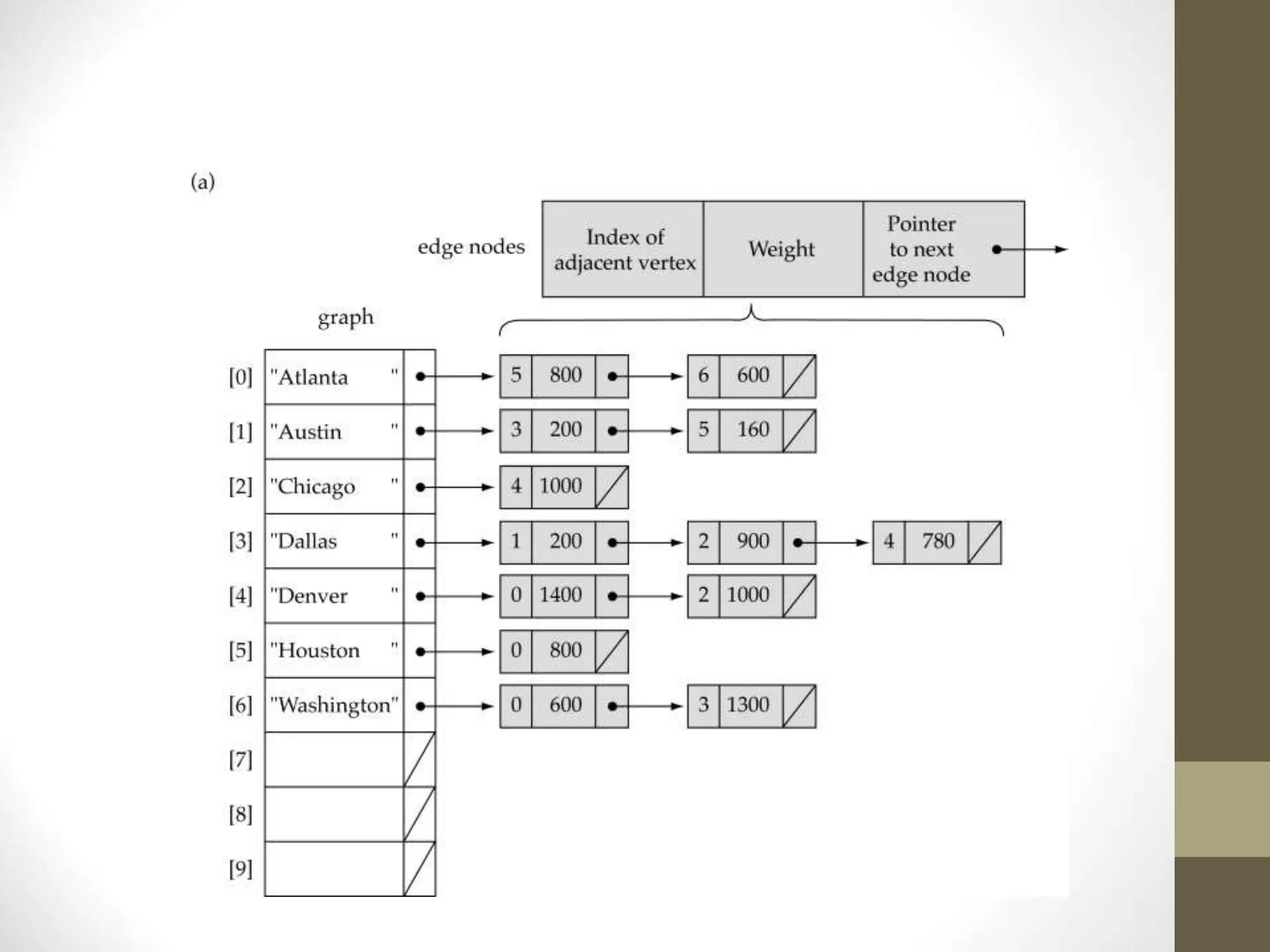
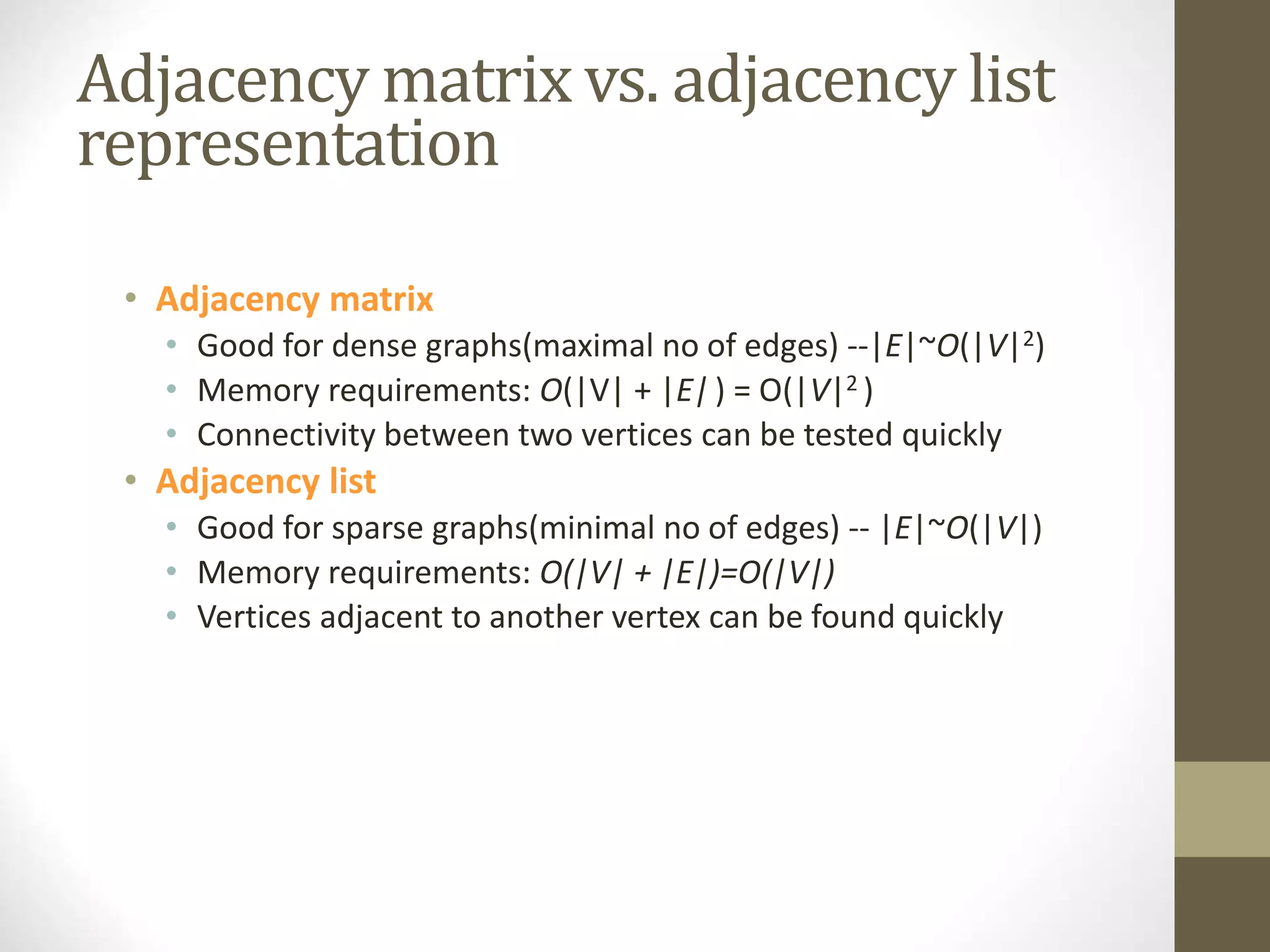
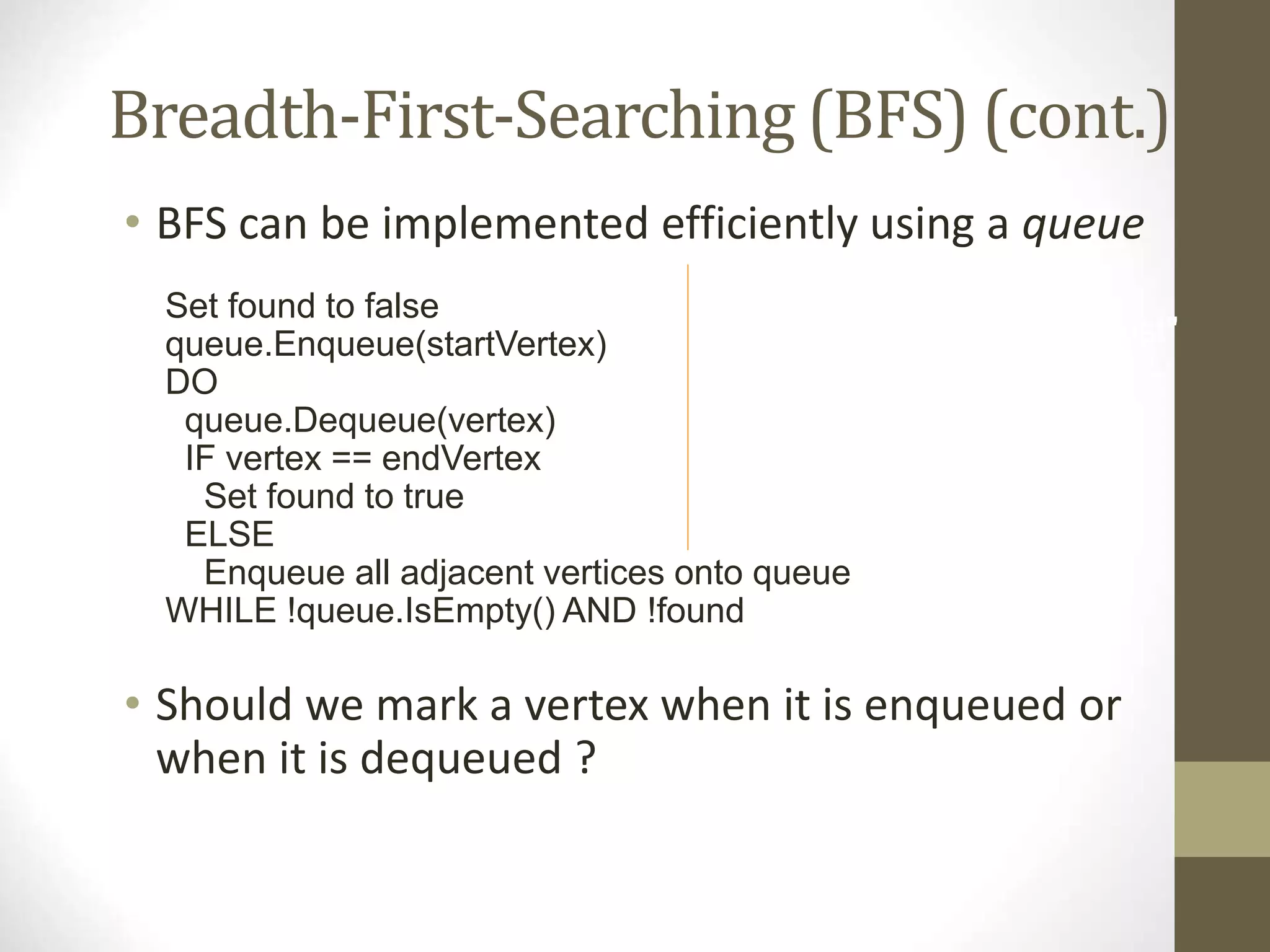
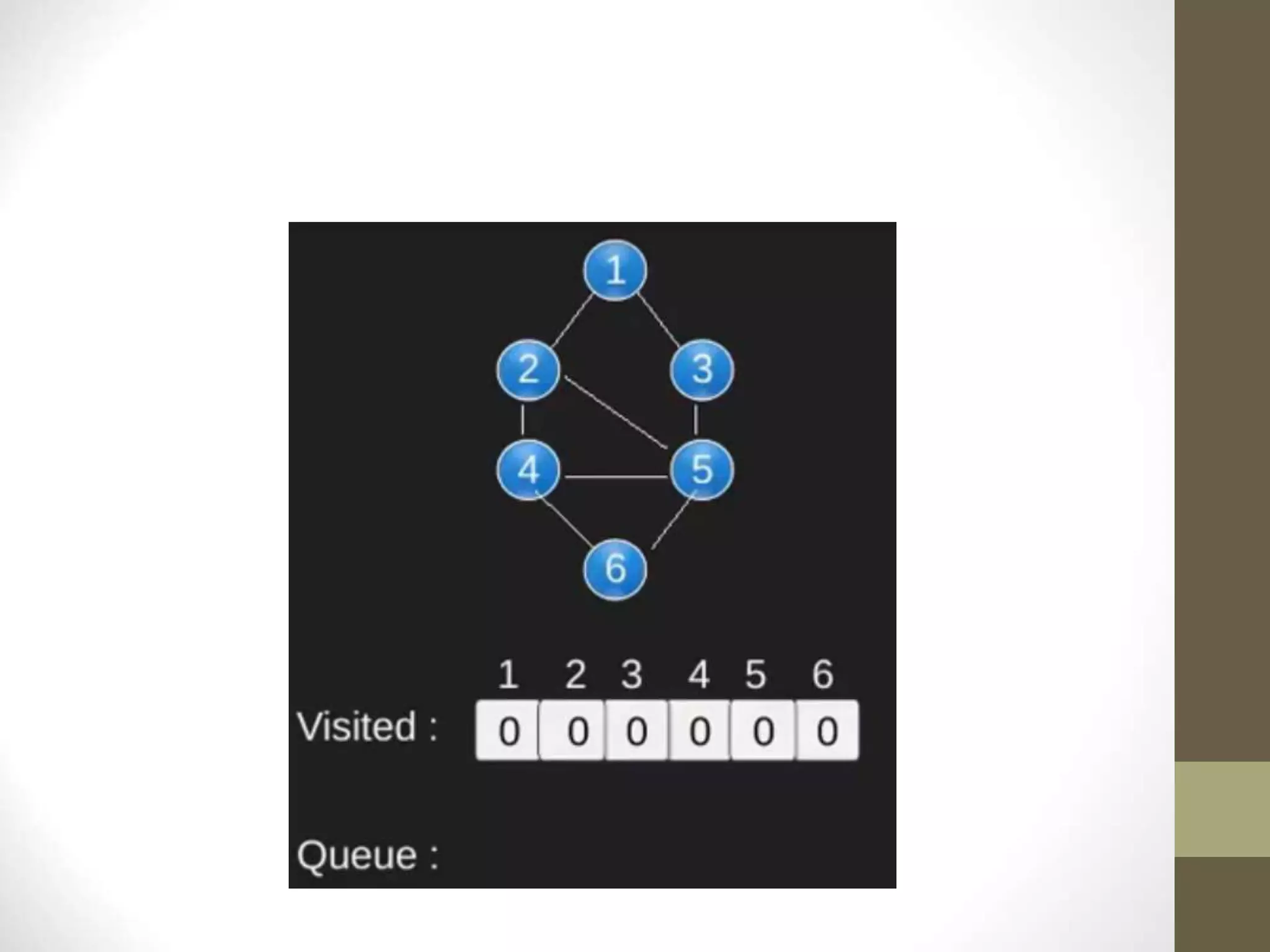
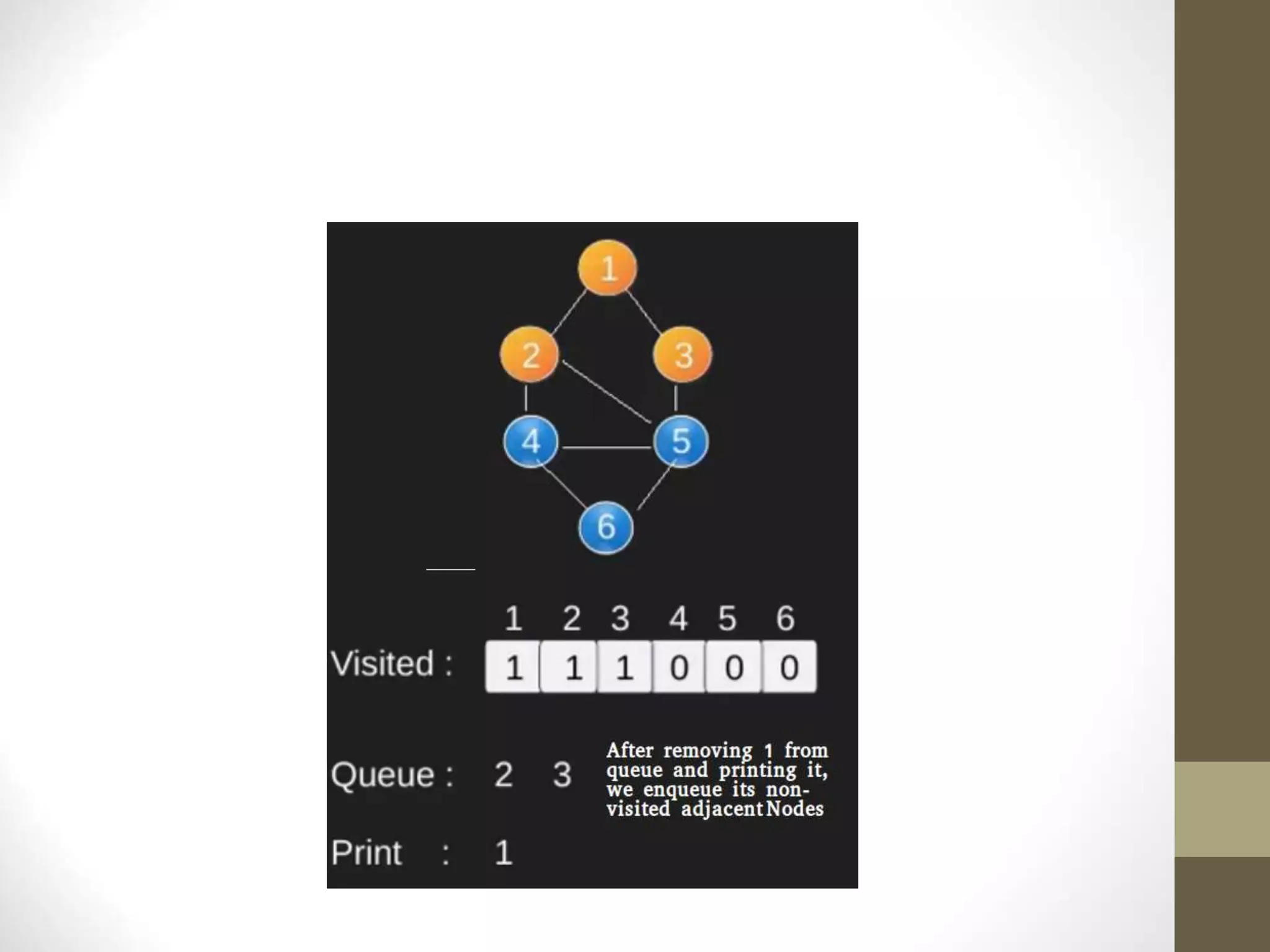
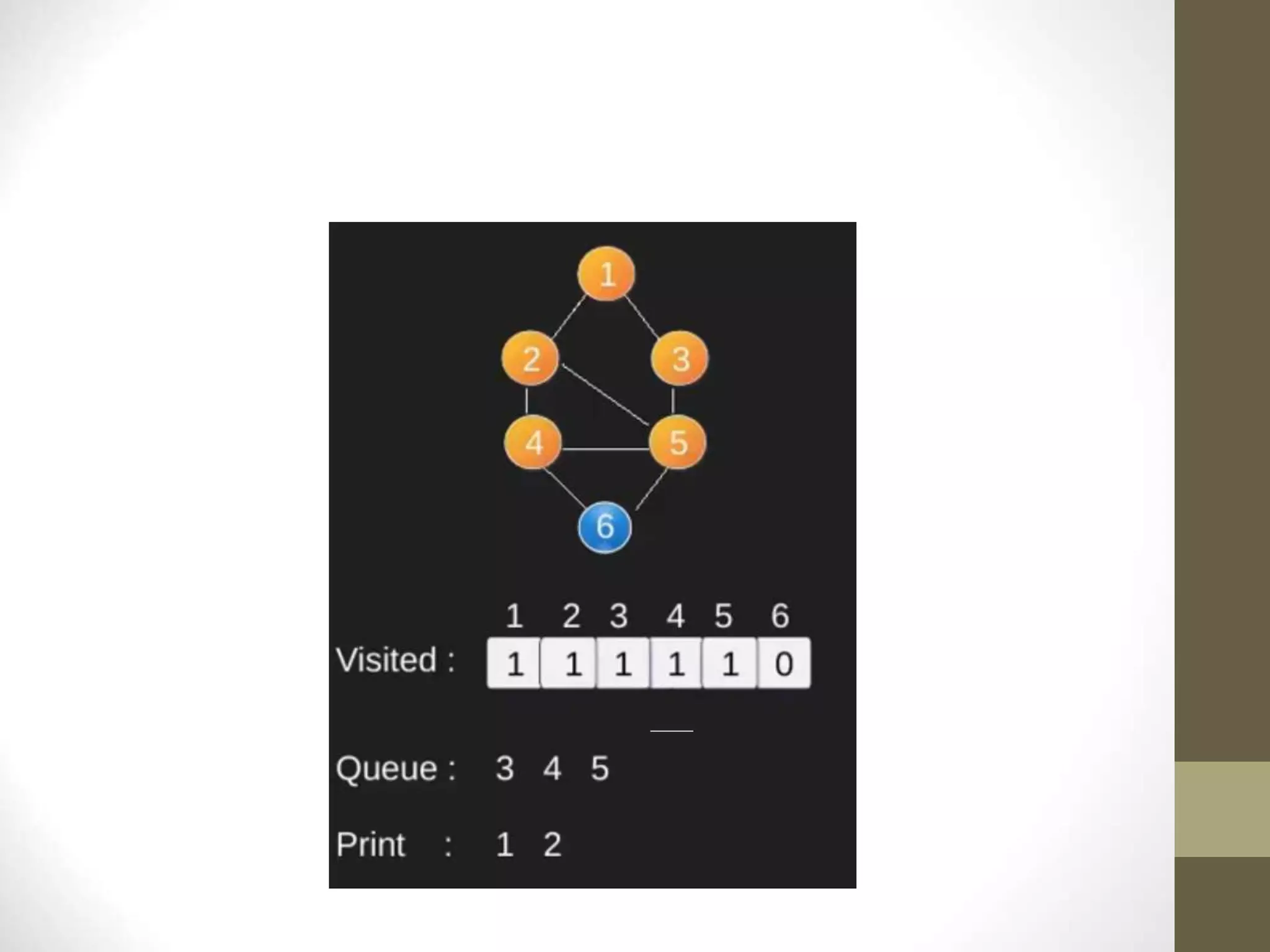
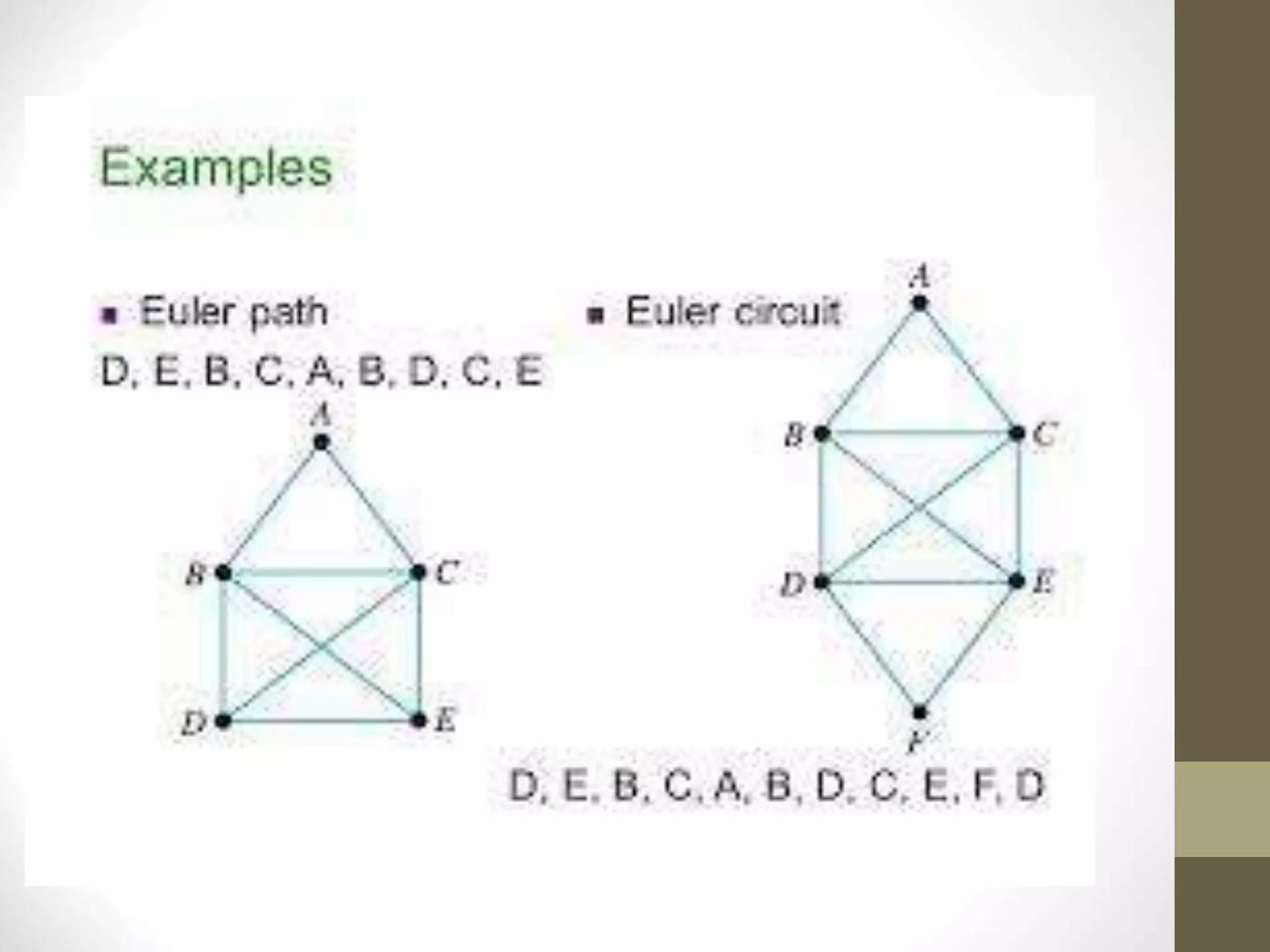
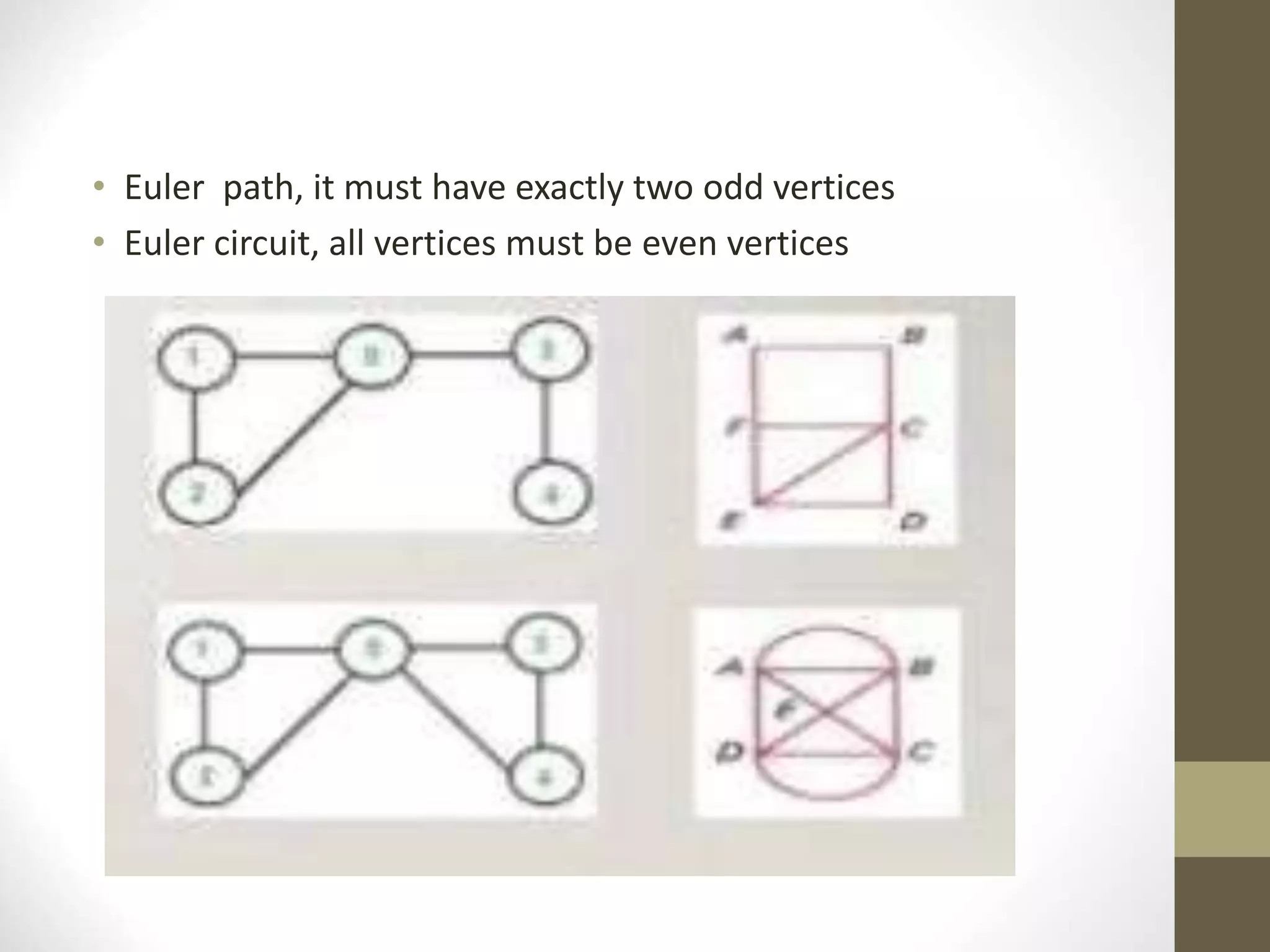
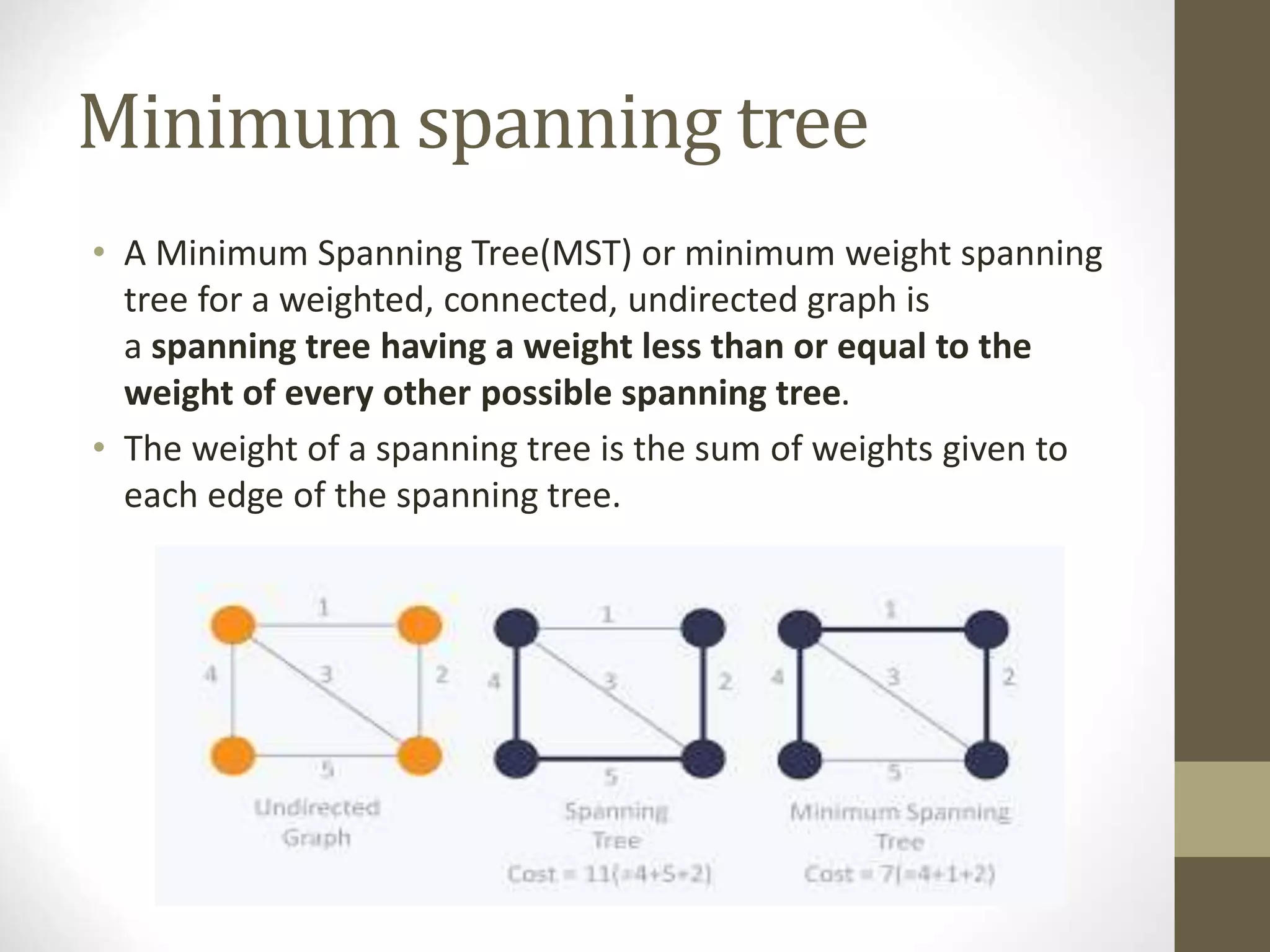
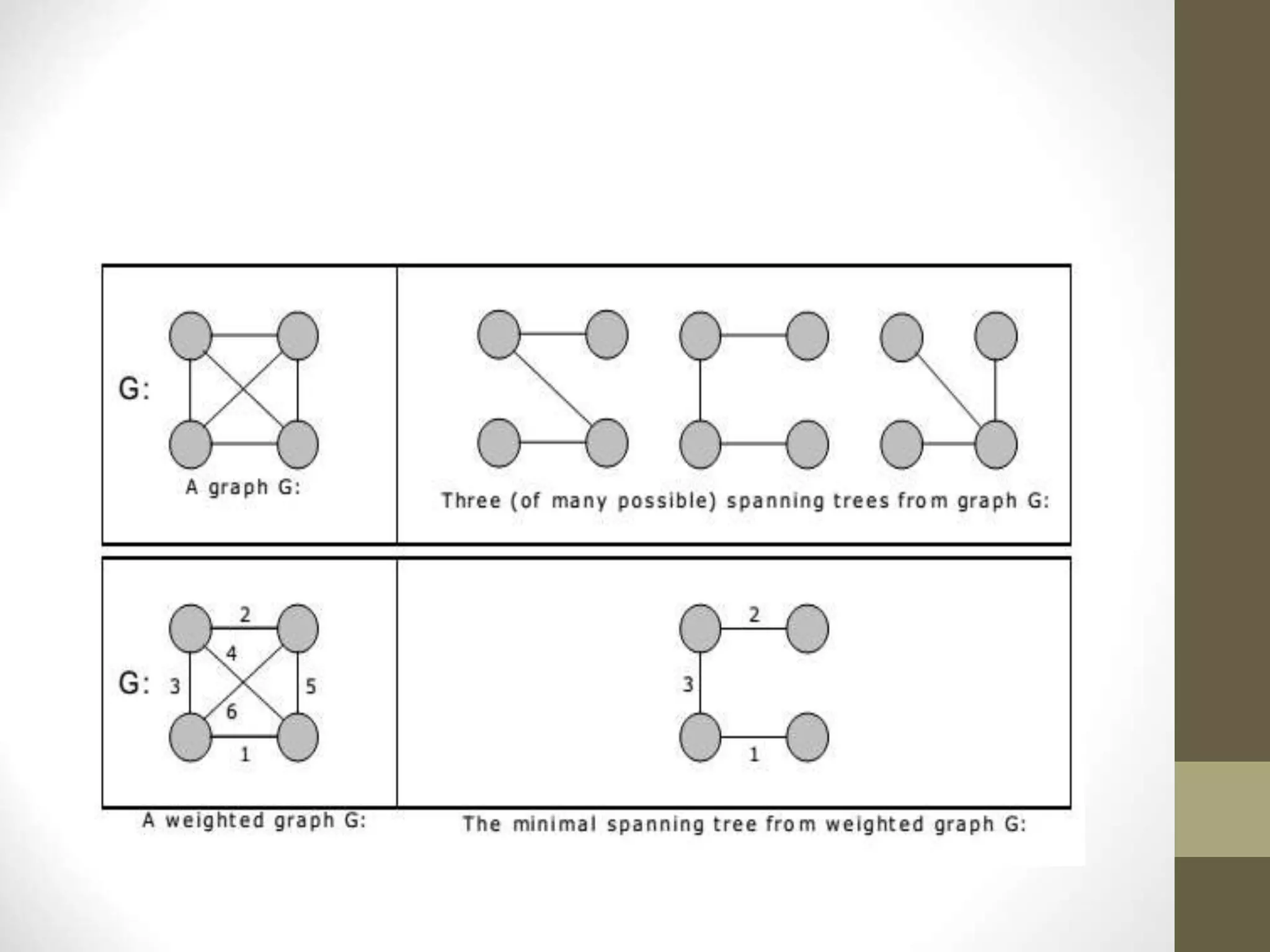

This document defines and explains various graph concepts: - A graph consists of vertices and edges connecting the vertices. Graphs can be directed or undirected. - Common graph terminology includes adjacent vertices, paths, complete graphs, weighted graphs, and representations using adjacency matrices and lists. - Graph searching algorithms like depth-first search (DFS) and breadth-first search (BFS) are used to find paths between vertices. - Graphs have applications in areas like maps, networks, and computational systems. Other graph topics covered include topological sorting, biconnectivity, cut vertices, Euler circuits, and minimum spanning trees.





![Data Structures - Lecture 10 [Graphs]](https://cdn.slidesharecdn.com/ss_thumbnails/datastructures-lecture10graphs-150305004608-conversion-gate01-thumbnail.jpg?width=640&height=640&fit=bounds)

















![Graph theory[1]](https://cdn.slidesharecdn.com/ss_thumbnails/graphtheory1-151213070323-thumbnail.jpg?width=640&height=640&fit=bounds)