
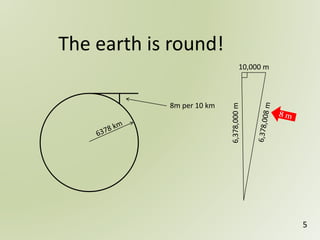
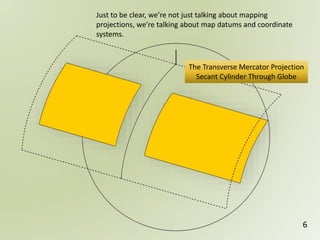

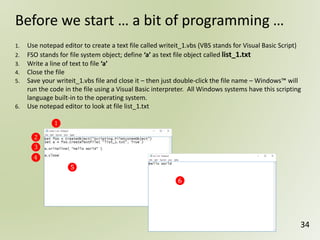
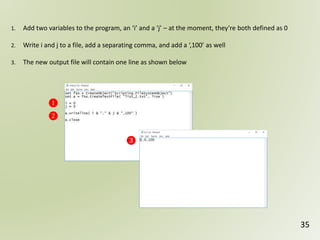


The document discusses geospatial reference systems, focusing on concepts such as reference frames, projections, and transformations, and emphasizes the importance of understanding spatial location and height. It provides insights on geoid models and the differences between various coordinate systems, including NAD27 and NAD83, as well as programming techniques using Visual Basic Script to assist in calculations. Additionally, the document includes links to online resources and tools related to geodetic reference systems and transformations.