This document summarizes a project on bidirectional buck boost cascade inverters. It presents:
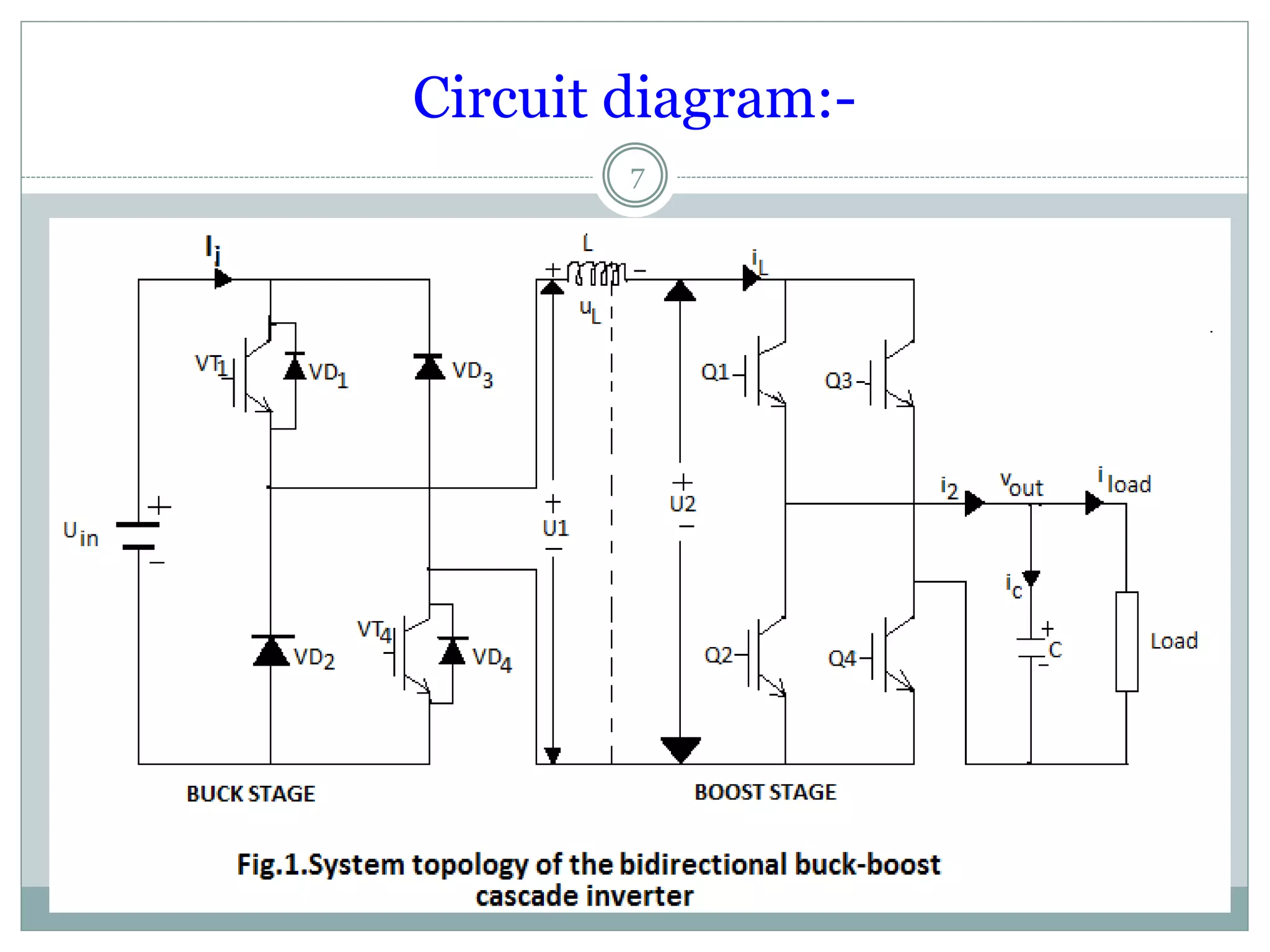
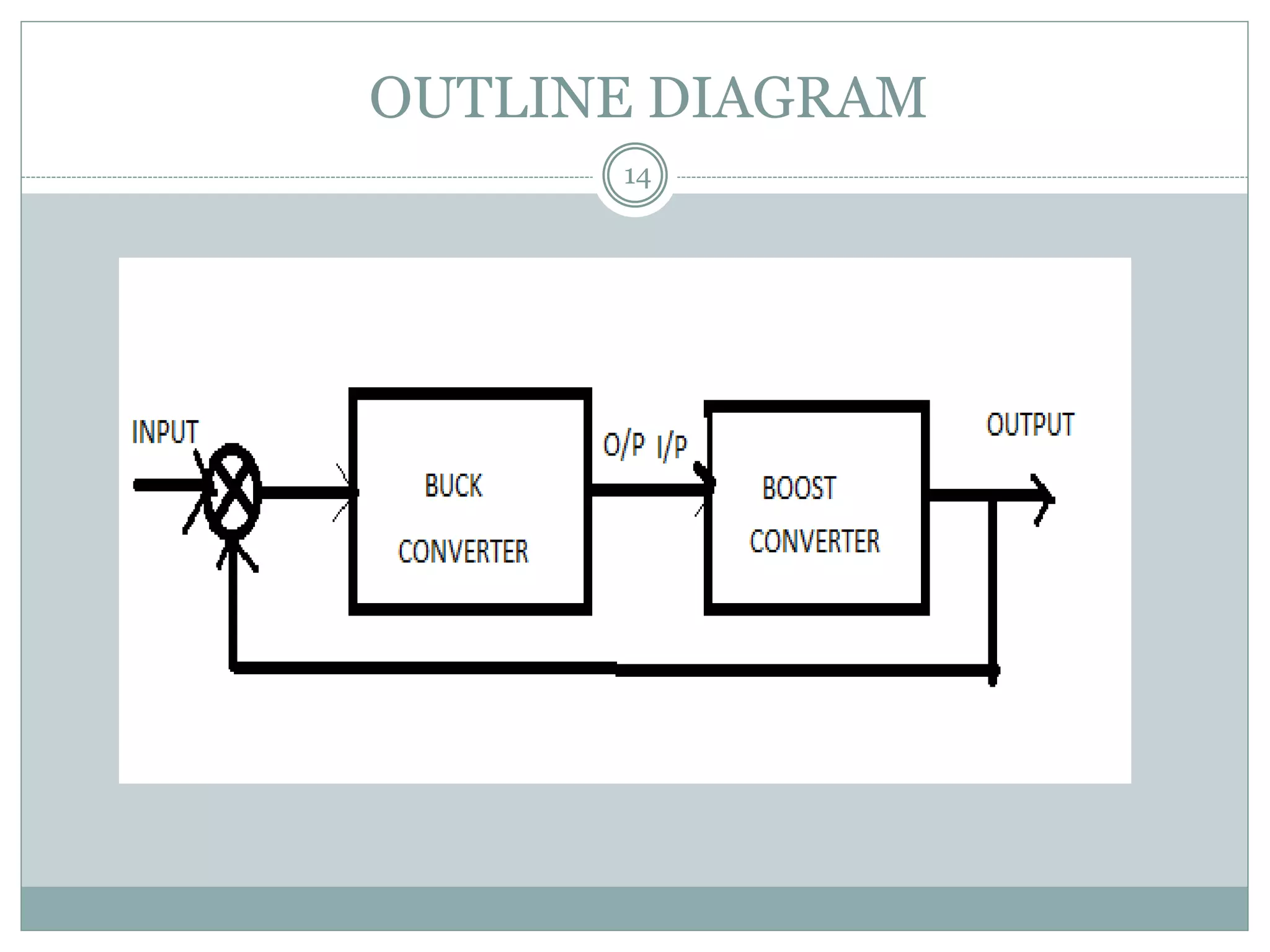
1. An abstract describing a bidirectional buck boost cascade inverter that uses a buck converter stage to maintain inductor current and a boost converter stage to control output voltage.
2. Descriptions of buck and boost converter operations, components, and applications such as battery charging.
3. Explanations of fuzzy logic controllers, including their advantages over PID controllers for uncertain or nonlinear systems.
4. A comparison of PID and fuzzy logic controllers, noting that fuzzy controllers can achieve high performance by eliminating system nonlinearities.