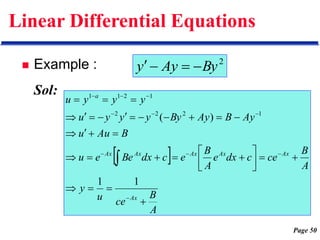
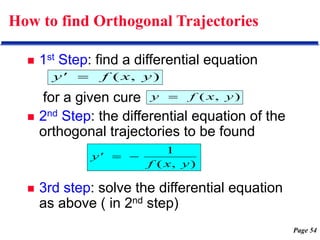
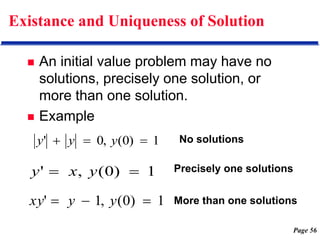
This document provides an outline and overview of concepts related to first-order differential equations. It discusses basic concepts such as differentiation, integration, orders of differential equations, and general vs. particular solutions. It also covers specific types of first-order differential equations like separable, exact, and linear differential equations. Methods for solving these types of equations are presented, including separation of variables, substitution, integrating factors, and finding general and particular solutions. Examples of applying these concepts and solution methods are provided.









































































![Human Reproduction [ Reproductive System ] Notes @irfanullah_mehar Irfanullah...](https://cdn.slidesharecdn.com/ss_thumbnails/humanreproductionreproductivesystemnotesirfanullahmeharirfanullahmeharjanantantra-260111172350-56e85778-thumbnail.jpg?width=640&height=640&fit=bounds)















