Download to read offline


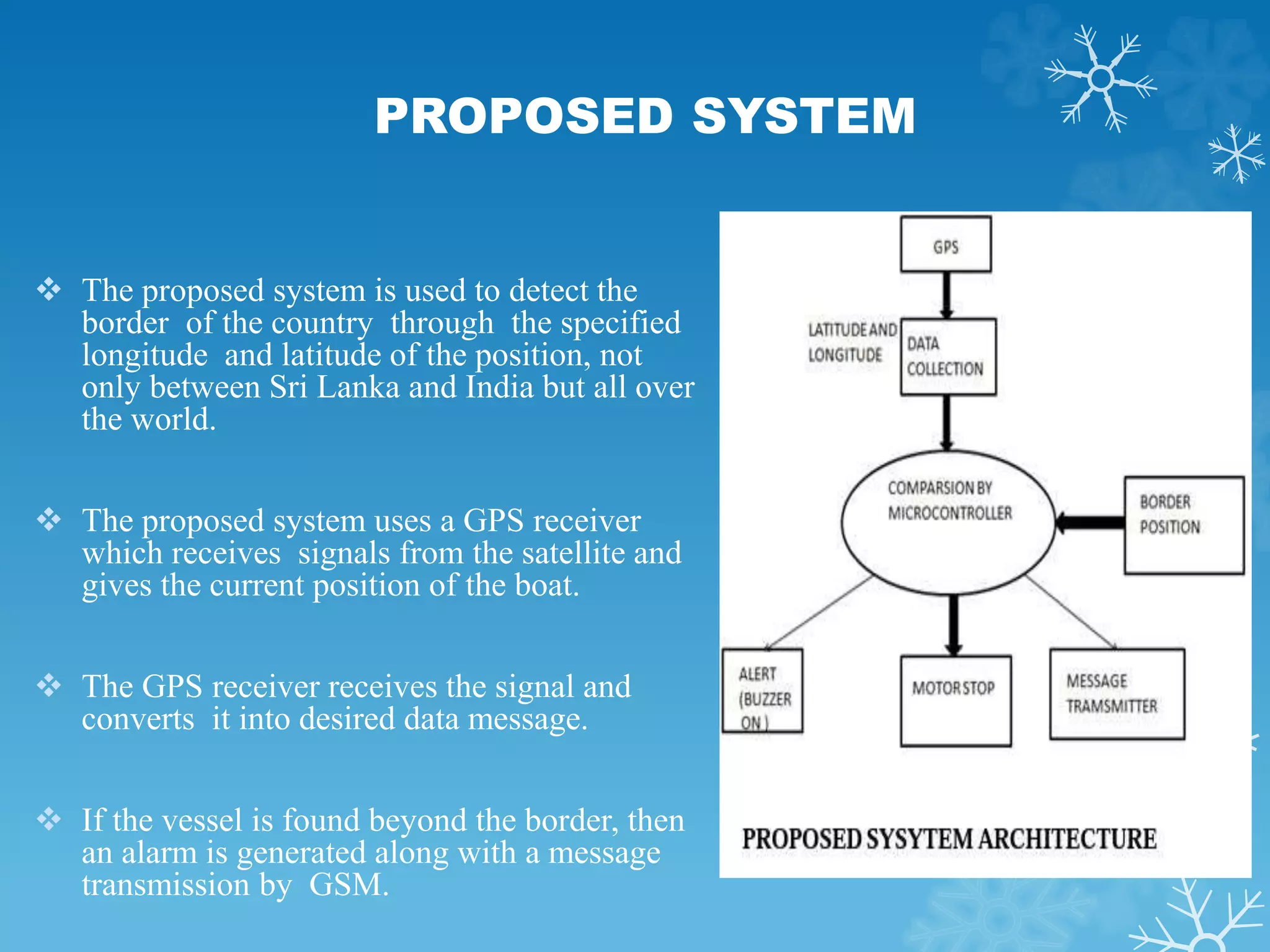

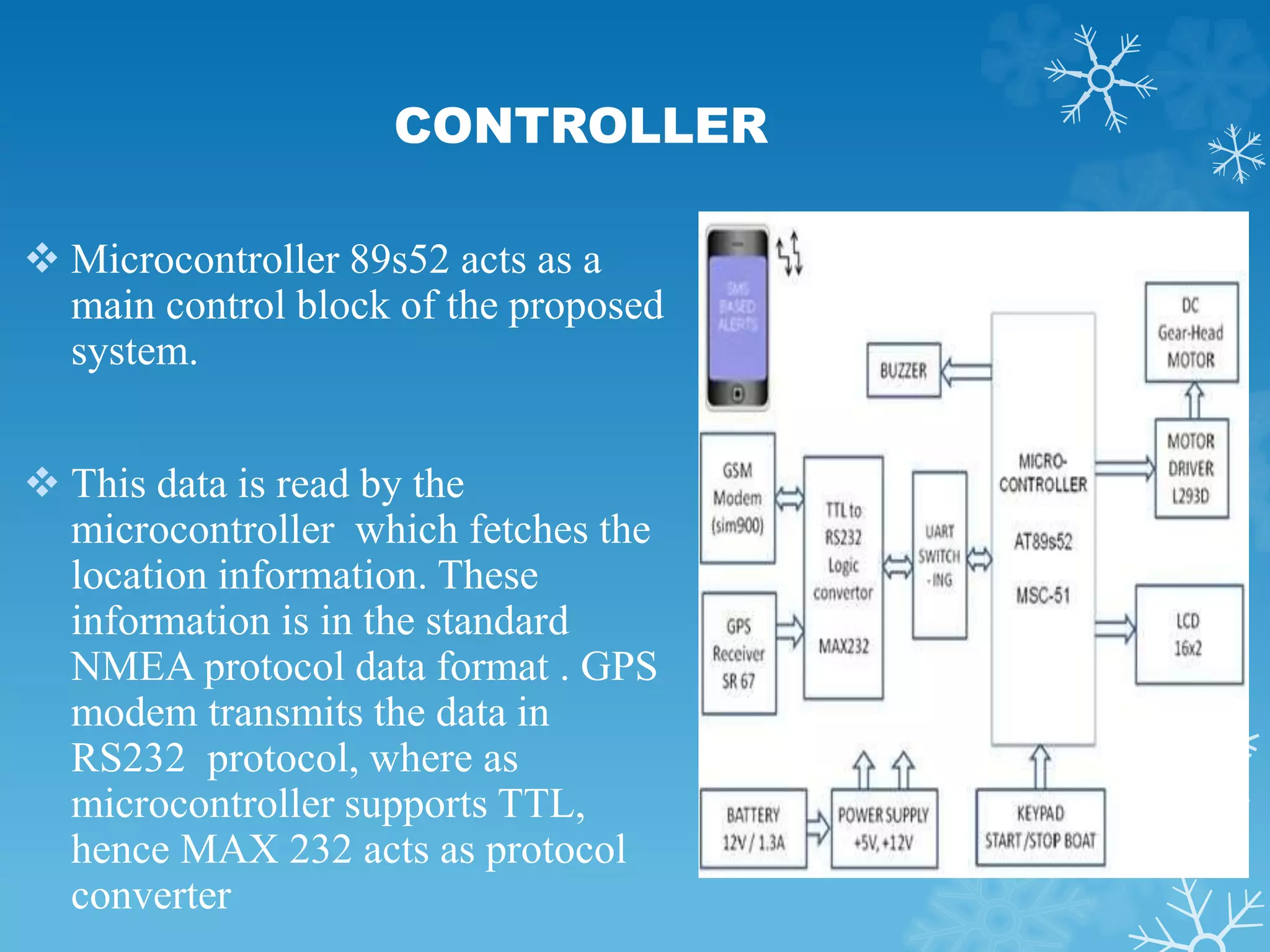



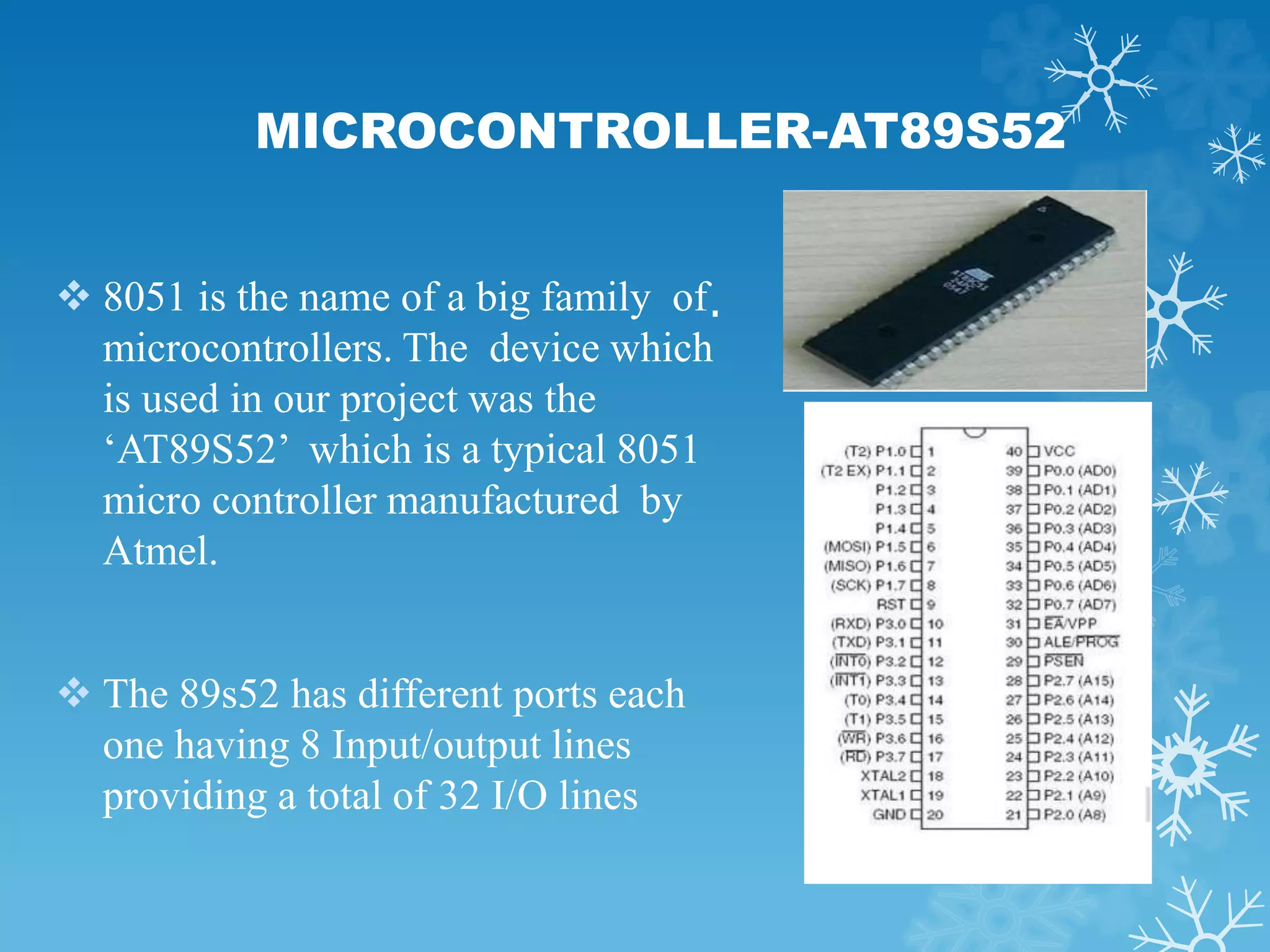







This document describes a proposed system to alert fishermen when their boats approach national borders at sea using GPS and GSM technologies. The system would track the boat's location via GPS and send alerts to the fishermen's mobile phones as well as border authorities when the boat enters different zones near the border, including generating an alarm and slowing the boat engine if it enters the restricted zone. The system is intended to help prevent fishermen from accidentally crossing borders and protect them from harm.































































