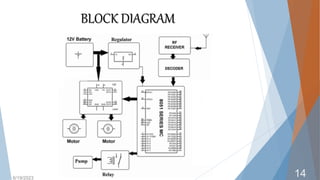
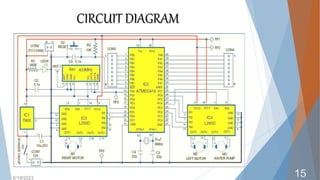
The document presents a project on an IoT-based fire-fighting robot designed to quickly detect and extinguish fires, which can operate in dangerous environments without human intervention. It details the robot's objectives, components, and its operational mechanics, including the use of various sensors and motors for navigation and fire suppression. The project aims to enhance safety, reduce ecological impacts, and improve response times in emergency scenarios.