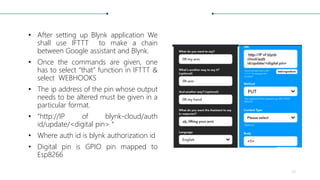
The Exoskeleton Arm Project Phase II aims to develop a hand exoskeleton for stroke rehabilitation, leveraging IoT to enable remote monitoring and therapy. The design involves multiple components, including actuators, microcontrollers, and EMG sensors, with a focus on torque requirements and a 3D-printed frame for the arm. The system integrates voice command functionality through Google Assistant and has potential applications in medical rehabilitation as well as military use.
![EXOSKELETON ARM
Project Phase II
› PROJECT GUIDE
› Mr. Anuroop PV
› Assistant Professor
› Division of EEE
› GROUP MEMBERS
› Adheena Joseph [19170200]
› Akarsh B Dhanesh [19170204]
› Anagha Chand P [19170207]
› Vivek C [19170240]
1](https://image.slidesharecdn.com/exoskeletonarmppt-201116160828/85/Exoskeleton-arm-ppt-1-320.jpg)
![EXOSKELETON ARM
Project Phase II
› PROJECT GUIDE
› Mr. Anuroop PV
› Assistant Professor
› Division of EEE
› GROUP MEMBERS
› Adheena Joseph [19170200]
› Akarsh B Dhanesh [19170204]
› Anagha Chand P [19170207]
› Vivek C [19170240]
1](https://image.slidesharecdn.com/exoskeletonarmppt-201116160828/75/Exoskeleton-arm-ppt-1-2048.jpg)