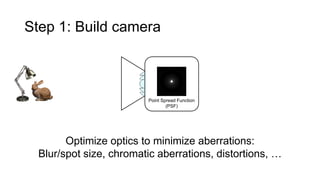
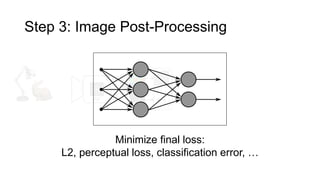
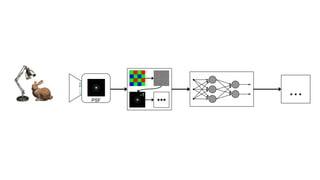
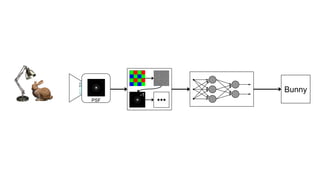
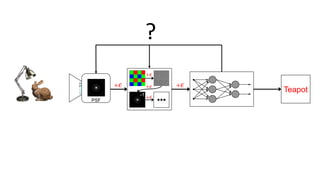
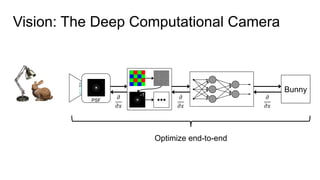
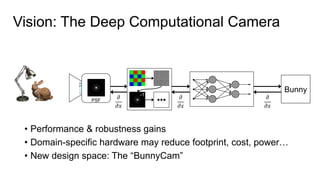
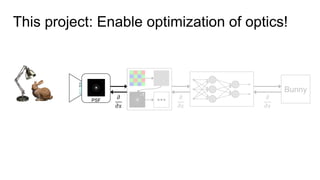
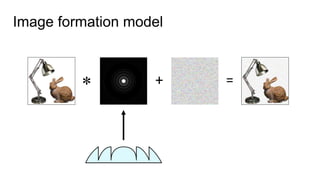
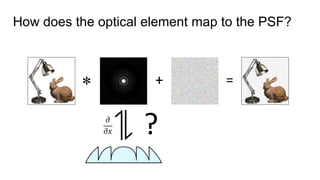
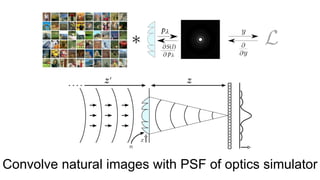
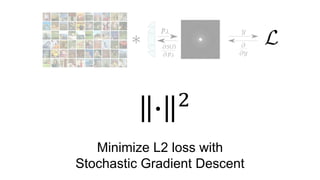
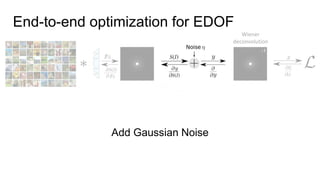
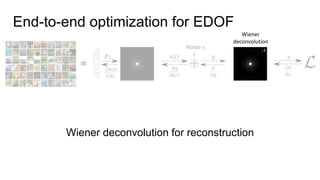
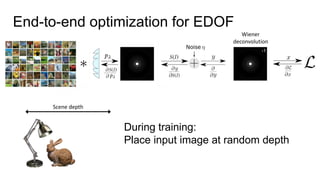
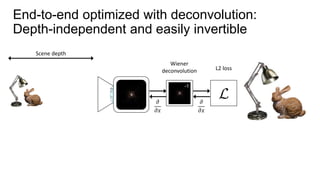
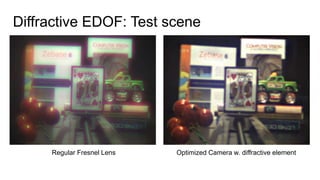
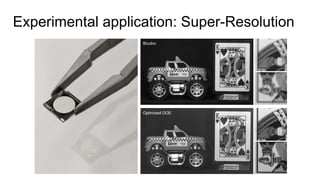
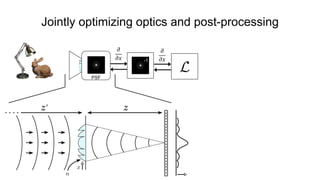
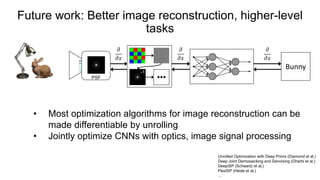
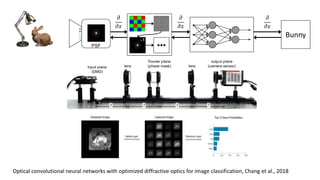
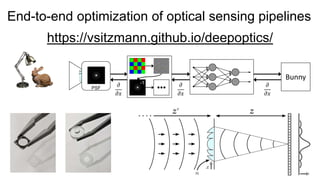
This document discusses the end-to-end optimization of optics and image processing for enhanced imaging techniques, focusing on achieving achromatic extended depth of field (EDOF) and super-resolution. It outlines a pipeline that includes the optimization of optical components to reduce aberrations, followed by image signal processing and final post-processing for improved outcomes. Future work aims to refine image reconstruction methods and integrate optics with image processing frameworks using advanced optimization algorithms.






![Height Map parameterization
(diffractive)
Zernike basis parameterization
(refractive)
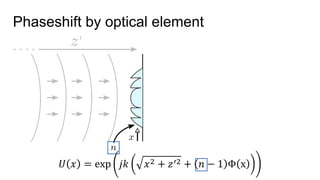
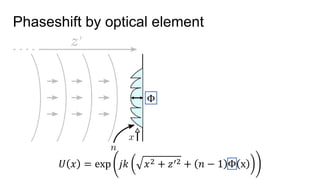
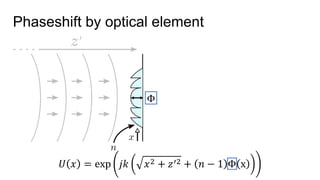
Φ 𝑥 = [ 𝑎11, 𝑎12, … , … ] Φ[𝑥] = 𝑍𝑖
𝑗
𝑥 ∙ 𝑎𝑖𝑗](https://image.slidesharecdn.com/learningdomain-specificcameras-180925221706/85/End-to-end-Optimization-of-Cameras-and-Image-Processing-SIGGRAPH-2018-27-320.jpg)












![[DL輪読会]PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metr...](https://cdn.slidesharecdn.com/ss_thumbnails/181214dlpointnet-181214053349-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]Deep High-Resolution Representation Learning for Human Pose Estimation](https://cdn.slidesharecdn.com/ss_thumbnails/20190517hrnet-190517005504-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2020 [O3-01] Extreme 3D センシング](https://cdn.slidesharecdn.com/ss_thumbnails/200612-ssii-extreme3dsensing-print3-200608114658-thumbnail.jpg?width=640&height=640&fit=bounds)