Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
KU
Uploaded by
Kyohei Unno
PPTX, PDF
4,958 views
20160724_cv_sfm_revisited
CV勉強会@関東 CVPR2016読み会 Structure-from-Motion Revisited
Technology
◦
Read more
8
Save
Share
Embed
Embed presentation
Download
Downloaded 72 times
1
/ 23
2
/ 23
3
/ 23
4
/ 23
5
/ 23
6
/ 23
7
/ 23
8
/ 23
9
/ 23
10
/ 23
Most read
11
/ 23
12
/ 23
13
/ 23
14
/ 23
15
/ 23
16
/ 23
Most read
17
/ 23
18
/ 23
Most read
19
/ 23
20
/ 23
21
/ 23
22
/ 23
23
/ 23
More Related Content
PDF
SSII2022 [SS1] ニューラル3D表現の最新動向〜 ニューラルネットでなんでも表せる?? 〜
by
SSII
PPTX
【DL輪読会】ViT + Self Supervised Learningまとめ
by
Deep Learning JP
PDF
【DL輪読会】Perceiver io a general architecture for structured inputs & outputs
by
Deep Learning JP
PDF
SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~
by
SSII
PDF
[DL輪読会]NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis
by
Deep Learning JP
PPTX
【DL輪読会】言語以外でのTransformerのまとめ (ViT, Perceiver, Frozen Pretrained Transformer etc)
by
Deep Learning JP
PPTX
【DL輪読会】Visual Classification via Description from Large Language Models (ICLR...
by
Deep Learning JP
PPTX
【論文読み会】BEiT_BERT Pre-Training of Image Transformers.pptx
by
ARISE analytics
SSII2022 [SS1] ニューラル3D表現の最新動向〜 ニューラルネットでなんでも表せる?? 〜
by
SSII
【DL輪読会】ViT + Self Supervised Learningまとめ
by
Deep Learning JP
【DL輪読会】Perceiver io a general architecture for structured inputs & outputs
by
Deep Learning JP
SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~
by
SSII
[DL輪読会]NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis
by
Deep Learning JP
【DL輪読会】言語以外でのTransformerのまとめ (ViT, Perceiver, Frozen Pretrained Transformer etc)
by
Deep Learning JP
【DL輪読会】Visual Classification via Description from Large Language Models (ICLR...
by
Deep Learning JP
【論文読み会】BEiT_BERT Pre-Training of Image Transformers.pptx
by
ARISE analytics
What's hot
PDF
【メタサーベイ】Video Transformer
by
cvpaper. challenge
PDF
SSII2021 [SS1] Transformer x Computer Visionの 実活用可能性と展望 〜 TransformerのCompute...
by
SSII
PDF
実装レベルで学ぶVQVAE
by
ぱんいち すみもと
PDF
深層学習によるHuman Pose Estimationの基礎
by
Takumi Ohkuma
PPTX
畳み込みニューラルネットワークの高精度化と高速化
by
Yusuke Uchida
PDF
30th コンピュータビジョン勉強会@関東 DynamicFusion
by
Hiroki Mizuno
PDF
ドメイン適応の原理と応用
by
Yoshitaka Ushiku
PDF
Transformer メタサーベイ
by
cvpaper. challenge
PDF
三次元点群を取り扱うニューラルネットワークのサーベイ
by
Naoya Chiba
PPTX
[DL輪読会]Vision Transformer with Deformable Attention (Deformable Attention Tra...
by
Deep Learning JP
PDF
Cvpr 2021 manydepth
by
Kenta Tanaka
PDF
動画認識サーベイv1(メタサーベイ )
by
cvpaper. challenge
PPTX
[DL輪読会]相互情報量最大化による表現学習
by
Deep Learning JP
PDF
SSII2022 [SS2] 少ないデータやラベルを効率的に活用する機械学習技術 〜 足りない情報をどのように補うか?〜
by
SSII
PDF
Skip Connection まとめ(Neural Network)
by
Yamato OKAMOTO
PPTX
Go-ICP: グローバル最適(Globally optimal) なICPの解説
by
Yusuke Sekikawa
PDF
semantic segmentation サーベイ
by
yohei okawa
PPTX
強化学習エージェントの内発的動機付けによる探索とその応用(第4回 統計・機械学習若手シンポジウム 招待公演)
by
Shota Imai
PPTX
3次元計測とフィルタリング
by
Norishige Fukushima
PDF
3D CNNによる人物行動認識の動向
by
Kensho Hara
【メタサーベイ】Video Transformer
by
cvpaper. challenge
SSII2021 [SS1] Transformer x Computer Visionの 実活用可能性と展望 〜 TransformerのCompute...
by
SSII
実装レベルで学ぶVQVAE
by
ぱんいち すみもと
深層学習によるHuman Pose Estimationの基礎
by
Takumi Ohkuma
畳み込みニューラルネットワークの高精度化と高速化
by
Yusuke Uchida
30th コンピュータビジョン勉強会@関東 DynamicFusion
by
Hiroki Mizuno
ドメイン適応の原理と応用
by
Yoshitaka Ushiku
Transformer メタサーベイ
by
cvpaper. challenge
三次元点群を取り扱うニューラルネットワークのサーベイ
by
Naoya Chiba
[DL輪読会]Vision Transformer with Deformable Attention (Deformable Attention Tra...
by
Deep Learning JP
Cvpr 2021 manydepth
by
Kenta Tanaka
動画認識サーベイv1(メタサーベイ )
by
cvpaper. challenge
[DL輪読会]相互情報量最大化による表現学習
by
Deep Learning JP
SSII2022 [SS2] 少ないデータやラベルを効率的に活用する機械学習技術 〜 足りない情報をどのように補うか?〜
by
SSII
Skip Connection まとめ(Neural Network)
by
Yamato OKAMOTO
Go-ICP: グローバル最適(Globally optimal) なICPの解説
by
Yusuke Sekikawa
semantic segmentation サーベイ
by
yohei okawa
強化学習エージェントの内発的動機付けによる探索とその応用(第4回 統計・機械学習若手シンポジウム 招待公演)
by
Shota Imai
3次元計測とフィルタリング
by
Norishige Fukushima
3D CNNによる人物行動認識の動向
by
Kensho Hara
Viewers also liked
PPTX
関東コンピュータビジョン勉強会
by
nonane
PPTX
畳み込みLstm
by
tak9029
PPTX
有名論文から学ぶディープラーニング 2016.03.25
by
Minoru Chikamune
PDF
VisualSFMとMeshLabとCloudCompareによるドローン撮影画像を用いたデジタル地図作成
by
Hiroshi Yamaguchi
PPTX
深層学習とTensorFlow入門
by
tak9029
PDF
機械学習モデルフォーマットの話:さようならPMML、こんにちはPFA
by
Shohei Hido
PDF
Hough forestを用いた物体検出
by
MPRG_Chubu_University
PDF
【関東GPGPU勉強会#4】GTX 1080でComputer Vision アルゴリズムを色々動かしてみる
by
Yasuhiro Yoshimura
PDF
ディジタル信号処理 課題解説 その9
by
noname409
PDF
Cloud frontの概要と勘所
by
Kei Hirata
PDF
Chainer, Cupy入門
by
Yuya Unno
PPTX
Process Simulation using DWSIM
by
Naren P.R.
PDF
TensorFlowで遊んでみよう!
by
Kei Hirata
PDF
最先端NLP勉強会 “Learning Language Games through Interaction” Sida I. Wang, Percy L...
by
Yuya Unno
PPTX
20161203 cv 3_d_recon_tracking_eventcamera
by
Kyohei Unno
PDF
アセンブラ漢文
by
kozossakai
PPTX
Cvim saisentan-cvpr-hyper depth
by
tomoaki0705
PDF
続・ハロー・ワールド入門(オープンソースカンファレンス2016 Tokyo/Spring ライトニングトーク)
by
kozossakai
PDF
Software for Edge Heavy Computing @ INTEROP 2016 Tokyo
by
Shohei Hido
PPTX
Scilab: Computing Tool For Engineers
by
Naren P.R.
関東コンピュータビジョン勉強会
by
nonane
畳み込みLstm
by
tak9029
有名論文から学ぶディープラーニング 2016.03.25
by
Minoru Chikamune
VisualSFMとMeshLabとCloudCompareによるドローン撮影画像を用いたデジタル地図作成
by
Hiroshi Yamaguchi
深層学習とTensorFlow入門
by
tak9029
機械学習モデルフォーマットの話:さようならPMML、こんにちはPFA
by
Shohei Hido
Hough forestを用いた物体検出
by
MPRG_Chubu_University
【関東GPGPU勉強会#4】GTX 1080でComputer Vision アルゴリズムを色々動かしてみる
by
Yasuhiro Yoshimura
ディジタル信号処理 課題解説 その9
by
noname409
Cloud frontの概要と勘所
by
Kei Hirata
Chainer, Cupy入門
by
Yuya Unno
Process Simulation using DWSIM
by
Naren P.R.
TensorFlowで遊んでみよう!
by
Kei Hirata
最先端NLP勉強会 “Learning Language Games through Interaction” Sida I. Wang, Percy L...
by
Yuya Unno
20161203 cv 3_d_recon_tracking_eventcamera
by
Kyohei Unno
アセンブラ漢文
by
kozossakai
Cvim saisentan-cvpr-hyper depth
by
tomoaki0705
続・ハロー・ワールド入門(オープンソースカンファレンス2016 Tokyo/Spring ライトニングトーク)
by
kozossakai
Software for Edge Heavy Computing @ INTEROP 2016 Tokyo
by
Shohei Hido
Scilab: Computing Tool For Engineers
by
Naren P.R.
Similar to 20160724_cv_sfm_revisited
PDF
SLAMチュートリアル大会資料(ORB-SLAM)
by
Masaya Kaneko
PPTX
論文紹介: Fast R-CNN&Faster R-CNN
by
Takashi Abe
PDF
Semantic segmentation
by
Takuya Minagawa
PPTX
Image Retrieval Overview (from Traditional Local Features to Recent Deep Lear...
by
Yusuke Uchida
PDF
優れた問いを見つける(中京大学講演)
by
cvpaper. challenge
PDF
これからのコンピュータビジョン技術 - cvpaper.challenge in PRMU Grand Challenge 2016 (PRMU研究会 2...
by
cvpaper. challenge
PDF
B3スタートアップ コンピュータビジョンの現在と未来にやるべきこと(東京電機大学講演)
by
cvpaper. challenge
PDF
R-SCoRe: Revisiting Scene Coordinate Regression for Robust Large-Scale Visual...
by
Takuya Minagawa
PPTX
CVPR2018 参加報告(速報版)初日
by
Atsushi Hashimoto
PPTX
Eccv2018 report day3
by
Atsushi Hashimoto
PPTX
Eccv2018 report day2
by
Atsushi Hashimoto
PPTX
Cvpr2018 参加報告(速報版)3日目
by
Atsushi Hashimoto
PDF
Learning Spatial Common Sense with Geometry-Aware Recurrent Networks
by
Kento Doi
PPTX
CVPR2017 参加報告 速報版 本会議3日目
by
Atsushi Hashimoto
PPTX
ACCV2014参加報告
by
Yasutomo Kawanishi
PPTX
Eccv2018 report day4
by
Atsushi Hashimoto
PDF
Copy and-paste networks for deep video inpainting
by
邦洋 長谷川
PDF
20140726 関東cv勉強会
by
M Kimura
PDF
【2015.07】(2/2)cvpaper.challenge@CVPR2015
by
cvpaper. challenge
PDF
【2015.08】(1/5)cvpaper.challenge@CVPR2015
by
cvpaper. challenge
SLAMチュートリアル大会資料(ORB-SLAM)
by
Masaya Kaneko
論文紹介: Fast R-CNN&Faster R-CNN
by
Takashi Abe
Semantic segmentation
by
Takuya Minagawa
Image Retrieval Overview (from Traditional Local Features to Recent Deep Lear...
by
Yusuke Uchida
優れた問いを見つける(中京大学講演)
by
cvpaper. challenge
これからのコンピュータビジョン技術 - cvpaper.challenge in PRMU Grand Challenge 2016 (PRMU研究会 2...
by
cvpaper. challenge
B3スタートアップ コンピュータビジョンの現在と未来にやるべきこと(東京電機大学講演)
by
cvpaper. challenge
R-SCoRe: Revisiting Scene Coordinate Regression for Robust Large-Scale Visual...
by
Takuya Minagawa
CVPR2018 参加報告(速報版)初日
by
Atsushi Hashimoto
Eccv2018 report day3
by
Atsushi Hashimoto
Eccv2018 report day2
by
Atsushi Hashimoto
Cvpr2018 参加報告(速報版)3日目
by
Atsushi Hashimoto
Learning Spatial Common Sense with Geometry-Aware Recurrent Networks
by
Kento Doi
CVPR2017 参加報告 速報版 本会議3日目
by
Atsushi Hashimoto
ACCV2014参加報告
by
Yasutomo Kawanishi
Eccv2018 report day4
by
Atsushi Hashimoto
Copy and-paste networks for deep video inpainting
by
邦洋 長谷川
20140726 関東cv勉強会
by
M Kimura
【2015.07】(2/2)cvpaper.challenge@CVPR2015
by
cvpaper. challenge
【2015.08】(1/5)cvpaper.challenge@CVPR2015
by
cvpaper. challenge
20160724_cv_sfm_revisited
1.
第35回 CV勉強会@関東 後編 CVPR2016読み会 Structure-from-Motion
Revisited 2016年7月24日 @OZ_Z_C 2016/7/24 CV勉強会@関東 CVPR2016読み会 1
2.
自己紹介 @OZ_Z_C (twitter) 某企業研究所所属 専門:画像符号化
(画像圧縮) 仕事 過去:H.264 encoderの開発、など 2016/4~ CV的な研究テーマに従事 よろしくお願いします! 2016/7/24 CV勉強会@関東 CVPR2016読み会 2
3.
今回読んだ論文 タイトル Structure-from-Motion Revisited どんな論文? Structure-from-Motionを全体的に地道によくした この論文を選んだ理由 Structure-from-Motionを勉強したかった アルゴリズム全体について述べられているので全体像を知るにはちょうどよい ソースコード&ビルド済みバイナリを公開していた COLMAP http://people.inf.ethz.ch/jschoenb/colmap/ 2016/7/24 CV勉強会@関東
CVPR2016読み会 3
4.
今回読んだ論文 タイトル Structure-from-Motion Revisited どんな論文? Structure-from-Motionを全体的に地道によくした この論文を選んだ理由 Structure-from-Motionを勉強したかった アルゴリズム全体について述べられているので全体像を知るにはちょうどよい ソースコード&ビルド済みバイナリを公開していた COLMAP http://people.inf.ethz.ch/jschoenb/colmap/ いろいろDLしてやってみたが、うまくいかなかった・・・ 自前ビルドは、LinuxかMac推奨 (Windowsでやったが挫折) ビルド済みバイナリはなぜかうまく動かなかった 2016/7/24
CV勉強会@関東 CVPR2016読み会 4
5.
発表の流れ 論文の流れに沿って下記順序で説明 1. Structure-from-Motionのアルゴリズム 2. 提案手法のコントリビューション 3.
性能評価 2016/7/24 CV勉強会@関東 CVPR2016読み会 5
6.
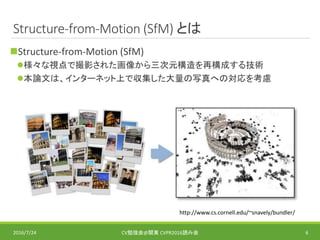
Structure-from-Motion (SfM) とは Structure-from-Motion
(SfM) 様々な視点で撮影された画像から三次元構造を再構成する技術 本論文は、インターネット上で収集した大量の写真への対応を考慮 2016/7/24 CV勉強会@関東 CVPR2016読み会 6 http://www.cs.cornell.edu/~snavely/bundler/
7.
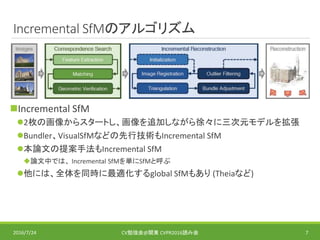
Incremental SfMのアルゴリズム Incremental SfM 2枚の画像からスタートし、画像を追加しながら徐々に三次元モデルを拡張 Bundler、VisualSfMなどの先行技術もIncremental
SfM 本論文の提案手法もIncremental SfM 論文中では、 Incremental SfMを単にSfMと呼ぶ 他には、全体を同時に最適化するglobal SfMもあり (Theiaなど) 2016/7/24 CV勉強会@関東 CVPR2016読み会 7
8.
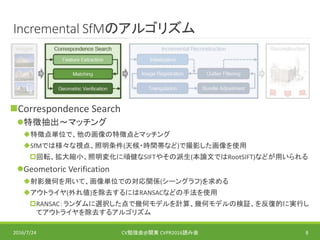
Incremental SfMのアルゴリズム Correspondence Search 特徴抽出~マッチング 特徴点単位で、他の画像の特徴点とマッチング SfMでは様々な視点、照明条件(天候・時間帯など)で撮影した画像を使用 回転、拡大縮小、照明変化に頑健なSIFTやその派生(本論文ではRootSIFT)などが用いられる Geometoric
Verification 射影幾何を用いて、画像単位での対応関係(シーングラフ)を求める アウトライヤ(外れ値)を除去するにはRANSACなどの手法を使用 RANSAC:ランダムに選択した点で幾何モデルを計算、幾何モデルの検証、を反復的に実行し てアウトライヤを除去するアルゴリズム 2016/7/24 CV勉強会@関東 CVPR2016読み会 8
9.
Incremental SfMのアルゴリズム Incremental Reconstruction 初期化 初期ペア画像で三次元モデルを初期化 初期値は大事 ロバスト性、精度、パフォーマンス(演算量❓)に影響 Image
Registration 三次元モデルに新しい画像を登録 三次元位置を算出済みの点と、新しく登録する画像の特徴点でPnP問題を解く カメラの位置・姿勢を推定 2016/7/24 CV勉強会@関東 CVPR2016読み会 9
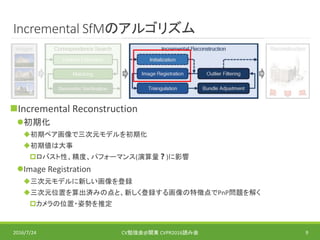
10.
Incremental SfMのアルゴリズム Incremental Reconstruction 三角測量 三角測量により、新しい画像の特徴点の三次元位置を算出 バンドル調整 画像登録(カメラの位置・姿勢推定)と三角測量(点の三次元位置算出)は互いに影響 再調整しないと、すぐ三次元モデルが破綻してしまう 下記2つの間の誤差(再投影誤差)を最小化してモデルを修正 画像上の特徴点(観測点)座標 構築した三次元モデルから算出した特徴点座標 2016/7/24
CV勉強会@関東 CVPR2016読み会 10
11.
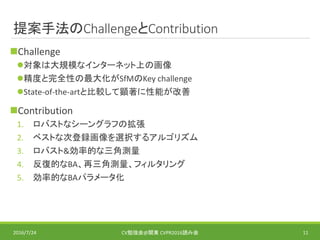
提案手法のChallengeとContribution Challenge 対象は大規模なインターネット上の画像 精度と完全性の最大化がSfMのKey challenge State-of-the-artと比較して顕著に性能が改善 Contribution 1. ロバストなシーングラフの拡張 2.
ベストな次登録画像を選択するアルゴリズム 3. ロバスト&効率的な三角測量 4. 反復的なBA、再三角測量、フィルタリング 5. 効率的なBAパラメータ化 2016/7/24 CV勉強会@関東 CVPR2016読み会 11
12.
提案手法のChallengeとContribution ContributionとIncremental SfMアルゴリズムの関係 2016/7/24 CV勉強会@関東
CVPR2016読み会 12 4.1 Scene Graph Augmentation 4.2 Next Best View Selection 4.3 Robust and Efficient Triangulation 4.5 Redundant View Mining 4.4 Bundle Adjustment
13.
4.1 Scene Graph
Augmentation 二つの工夫でロバストにシーングラフを拡大 1. Panoramic (純粋な回転) なシーン(画像ペア)を見つける 焦点距離・基礎行列などが求められない→のちの三角測量で使わないようにするため 手順 1. 下記3つの手法でGeometric Verificationを行い、インライアの数Nを求める 基礎行列F:NF、基本行列E:NE、ホモグラフィH:NH 2. NH / NF < εHF の場合、general (普通の❓) シーンとみなす 3. NE / NF > εEF (正しくキャリブレーションされている)かつNH / NF < εHF の場合、三角測量した際 の角のメディアン値αmを用いてpanoramic or planar を判定する NH / NE > εHE の間違い? 実際はαmを使っていない? (ソースコードより) 2016/7/24 CV勉強会@関東 CVPR2016読み会 13 Panoramicな例
14.
4.1 Scene Graph
Augmentation 二つの工夫でロバストにシーングラフを拡大 2. WTFs (Watermark, Timestamp, Frames) が含まれる画像を除外 手順 1. 画面端でのインライアの数NSを求める 2. NS / NF > εSF ∨ NS / NE > εSE の場合、WTFsが含まれた画像とみなす 2016/7/24 CV勉強会@関東 CVPR2016読み会 14 [60]T.Weyand, et.al. Fixing wtfs: Detecting image matches caused by watermark, timestamps, and frames in internet photos
15.
4.2 Next Best
View Selection “良い”画像とは? 可視点 (Visible point) がたくさんある 画面全体にまんべんなく分布している これらの両方をうまく評価できる指標? 下記4パターンだと右下が一番良い 2016/7/24 CV勉強会@関東 CVPR2016読み会 15
16.
4.2 Next Best
View Selection スコアSを提案 画面をL階層に四分木分割 階層l (l = 1, … ,L ) の各セルに可視点があるかないかを2値で表現 𝑆 = 𝑙=1 𝐿 𝑤𝑙 ∙ 𝑁𝑙 𝑤𝑙: = 22l 重み , 𝑁𝑙: l階層目の”1”のセル数 最もSが大きい画像がBest! 2016/7/24 CV勉強会@関東 CVPR2016読み会 16 数の違い 分布の 違い wl = 2l ?
17.
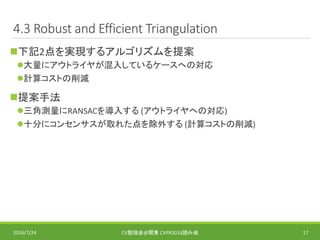
4.3 Robust and
Efficient Triangulation 下記2点を実現するアルゴリズムを提案 大量にアウトライヤが混入しているケースへの対応 計算コストの削減 提案手法 三角測量にRANSACを導入する (アウトライヤへの対応) 十分にコンセンサスが取れた点を除外する (計算コストの削減) 2016/7/24 CV勉強会@関東 CVPR2016読み会 17
18.
4.4 Bundle Adjustment 突然ですが、VisualSfMでは・・・ 1.
各画像登録・三角測量後は局所的なBA (local BA) のみ行う 2. ある程度画像・三角点が増えて来たら全体的なBA (global BA) を行う 3. global BAの前に、再三角測量 (RT) を行う 4. global BA後は、再投影誤差が大きい点をフィルタリングする 提案手法 pre-BA RT、 post-BA RTを行うBAを提案 pre-BA RT、global BA、 post-BA RT、フィルタリングを反復的に行う BAはアウトライヤに大きく影響→もう一度RTをやると結果が良くなる アウトライヤをフィルタリングした後にBAすれば、モデルが劇的に良くなる 2016/7/24 CV勉強会@関東 CVPR2016読み会 18
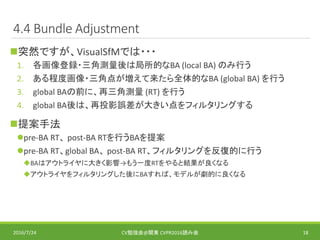
19.
4.5 Redundant View
Mining BAは大きなボトルネック 提案方式の演算量内訳 (1: 改善前、2:改善後) 先行研究 Kushalら[文献33] 二つの画像間での共可視点の数で冗長なカメラを見つけて演算コストを削減 Niら[文献43] 観測データをサブマップに分割し、並列で最適化 Carloneら[文献11] 複数の低ランクな点を、一つの高ランクなカメラにまとめる(?) 提案手法 上記手法の良いとこどり 2016/7/24 CV勉強会@関東 CVPR2016読み会 19
20.
4.5 Redundant View
Mining 提案手法 1. affectなシーンとunaffectなシーンに分類 Affectの定義 : 直前に追加された画像 or アウトライヤが一定の割合以上含まれている画像 2. unaffectなシーンを視野のオーバーラップが大きな画像のグループに分類 共可視点の多さを下記Vabで評価 :i番目の画像で、Nx個の空間上の点が可視かどうかをNx桁の0/1で表現したベクトル |Vab| > V (V:閾値) を超えた場合、グループに追加 閾値を下回る場合 or グループ内の画像数が一定以上になった場合:新しいグループを作成 3. グループ内の画像を一つのカメラとみなしてパラメータを統一・・・? affectなシーンはパラメータが調整できるようそのままにしておく unaffectなシーンの最適化をいかに効率よくさぼるかが狙い? 2016/7/24 CV勉強会@関東 CVPR2016読み会 20 babaabV vvvv iv
21.
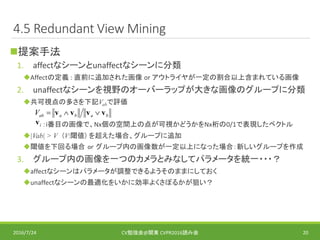
性能評価 比較手法 Incremental SfM :
Bundler, Visual SfM global SfM : Theia, DISCO データセット 17種類のデータセットで比較 Quadデータセットはカメラ位置のground truth付き 2016/7/24 CV勉強会@関東 CVPR2016読み会 21 Romeデータセットの実行結果
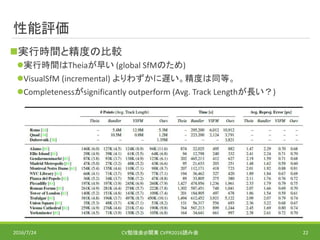
22.
性能評価 実行時間と精度の比較 実行時間はTheiaが早い (global SfMのため) VisualSfM
(incremental) よりわずかに遅い。精度は同等。 Completenessがsignificantly outperform (Avg. Track Lengthが長い?) 2016/7/24 CV勉強会@関東 CVPR2016読み会 22
23.
fin. 2016年7月24日 @OZ_Z_C 2016/7/24 CV勉強会@関東
CVPR2016読み会 23
Download


![4.1 Scene Graph Augmentation
二つの工夫でロバストにシーングラフを拡大
2. WTFs (Watermark, Timestamp, Frames) が含まれる画像を除外
手順
1. 画面端でのインライアの数NSを求める
2. NS / NF > εSF ∨ NS / NE > εSE の場合、WTFsが含まれた画像とみなす
2016/7/24 CV勉強会@関東 CVPR2016読み会 14
[60]T.Weyand, et.al. Fixing wtfs: Detecting image matches caused by watermark, timestamps, and frames in internet photos](https://image.slidesharecdn.com/20160724cvsfmrevisited-160724010210/85/20160724_cv_sfm_revisited-14-320.jpg)


![4.5 Redundant View Mining
BAは大きなボトルネック
提案方式の演算量内訳 (1: 改善前、2:改善後)
先行研究
Kushalら[文献33]
二つの画像間での共可視点の数で冗長なカメラを見つけて演算コストを削減
Niら[文献43]
観測データをサブマップに分割し、並列で最適化
Carloneら[文献11]
複数の低ランクな点を、一つの高ランクなカメラにまとめる(?)
提案手法
上記手法の良いとこどり
2016/7/24 CV勉強会@関東 CVPR2016読み会 19](https://image.slidesharecdn.com/20160724cvsfmrevisited-160724010210/85/20160724_cv_sfm_revisited-19-320.jpg)
![SSII2022 [SS1] ニューラル3D表現の最新動向〜 ニューラルネットでなんでも表せる?? 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ss1ssii2022hkatoneural3drepresentationhiroharukato-220607054619-fadc6480-thumbnail.jpg?width=640&height=640&fit=bounds)



![[DL輪読会]NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis](https://cdn.slidesharecdn.com/ss_thumbnails/nerfdlseminar1-200327021512-thumbnail.jpg?width=640&height=640&fit=bounds)




![SSII2021 [SS1] Transformer x Computer Visionの 実活用可能性と展望 〜 TransformerのCompute...](https://cdn.slidesharecdn.com/ss_thumbnails/ss1-01-210607043349-thumbnail.jpg?width=640&height=640&fit=bounds)







![[DL輪読会]Vision Transformer with Deformable Attention (Deformable Attention Tra...](https://cdn.slidesharecdn.com/ss_thumbnails/dl0114-220114032933-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]相互情報量最大化による表現学習](https://cdn.slidesharecdn.com/ss_thumbnails/20190913iwasawa-190913002312-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2022 [SS2] 少ないデータやラベルを効率的に活用する機械学習技術 〜 足りない情報をどのように補うか?〜](https://cdn.slidesharecdn.com/ss_thumbnails/ss2ssii2022-220607054716-2760bd30-thumbnail.jpg?width=640&height=640&fit=bounds)