[DL輪読会]CVPR2019:Weakly-Supervised Discovery of Geometry-Aware Representation for 3D Human Pose Estimation
1.
EP LEARNING JP
[DLPapers]
Weakly-Supervised Discovery of Geometry-Aware
Representa<on for 3D Human Pose Es<ma<on
Koichiro Tamura, Matsuo L
http://deeplearn
2.
PAPER INFORMATION
Weakly-Supervised Discoveryof Geometry-Aware
�epresentation for 3D Human Pose Estimation�
– Xipeng Chen, Kwan-Yee Lin, Wentao Liu, Chen Qian, Xiaogang Wang,
Liang Lin�
– Submitted on 21 Mar 2019 (arxiv��
– https://arxiv.org/abs/1903.08839�
– Accepted as a C�P� 2019 oral paper�
3D Pose Estimation�
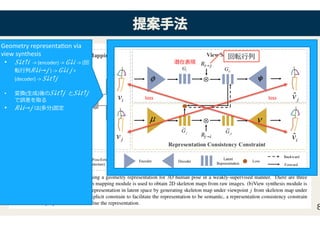
– Multi View の 2D Pose Estimationを⽤いて,特定の画⾓から他の画⾓への
換を⾏うauto-encoderを学習し、幾何学的な意味合いを持つメタ的なヒトの
次元構造の潜在表現を得る�
2
![EP LEARNING JP
[DL Papers]
Weakly-Supervised Discovery of Geometry-Aware
Representa<on for 3D Human Pose Es<ma<on
Koichiro Tamura, Matsuo L
http://deeplearn](https://image.slidesharecdn.com/weaklysuperviseddiscoveryofgeometryawarerepresentationfor3dhumanposeestimation-190722094452/85/DL-CVPR2019-Weakly-Supervised-Discovery-of-Geometry-Aware-Representation-for-3D-Human-Pose-Estimation-1-320.jpg)
![EP LEARNING JP
[DL Papers]
Weakly-Supervised Discovery of Geometry-Aware
Representa<on for 3D Human Pose Es<ma<on
Koichiro Tamura, Matsuo L
http://deeplearn](https://image.slidesharecdn.com/weaklysuperviseddiscoveryofgeometryawarerepresentationfor3dhumanposeestimation-190722094452/75/DL-CVPR2019-Weakly-Supervised-Discovery-of-Geometry-Aware-Representation-for-3D-Human-Pose-Estimation-1-2048.jpg)




![[DL輪読会]3D Human Pose Estimation @ CVPR’19 / ICCV’19](https://cdn.slidesharecdn.com/ss_thumbnails/190816dlseminar3dhpe-190816032821-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Human Pose Estimation @ ECCV2018](https://cdn.slidesharecdn.com/ss_thumbnails/180928dlseminarposeestimationeccv2018-180928031032-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]VoxelPose: Towards Multi-Camera 3D Human Pose Estimation in Wild Envir...](https://cdn.slidesharecdn.com/ss_thumbnails/20201023voxelposekuboshizuma-201023025841-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Deep High-Resolution Representation Learning for Human Pose Estimation](https://cdn.slidesharecdn.com/ss_thumbnails/20190517hrnet-190517005504-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]Geometric Unsupervised Domain Adaptation for Semantic Segmentation](https://cdn.slidesharecdn.com/ss_thumbnails/20220121gudalin-220121050547-thumbnail.jpg?width=640&height=640&fit=bounds)



![[DLHacks 実装] DeepPose: Human Pose Estimation via Deep Neural Networks](https://cdn.slidesharecdn.com/ss_thumbnails/20170821onodeepposepresentation-170928100207-thumbnail.jpg?width=640&height=640&fit=bounds)