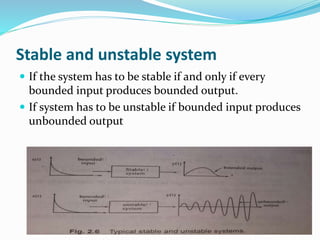
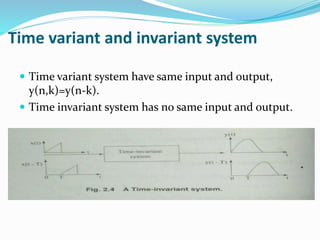
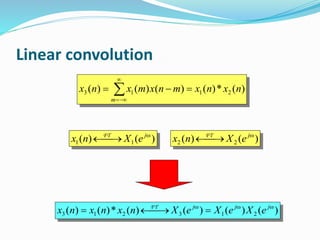
This document summarizes key concepts in digital signal processing systems. It defines a system as a combination of elements that processes an input signal to produce an output signal. Systems are classified as continuous or discrete time, lumped or distributed parameter, static or dynamic, causal or non-causal, linear or non-linear, time variant or invariant, and stable or unstable. Convolution and the discrete Fourier transform (DFT) are also introduced as important tools in digital signal processing. The DFT transforms a signal from the time domain to the frequency domain.


![Linear and non linear system
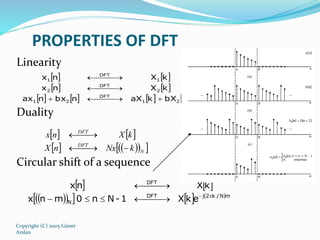
A System is said to be linear if it follows super position
principle is called as linear other wise non-linear.
T[ax1(t)+bx2(t)]=aT[x1(t)]+bT[x2(t)]
Similarly for a discrete-time linear system,
T[ax1(n)+bx2(n)]=aT[x1(n)]+bT[x2(n)]](https://image.slidesharecdn.com/digitalsignalprocessing-171227110317/85/Digital-signal-processing-9-320.jpg)
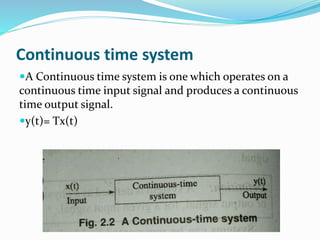
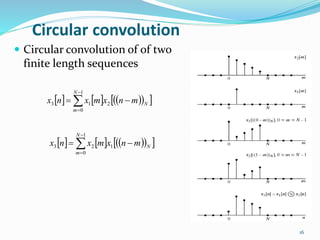
![CONVOLUTION
Convolution is the process by which an input interacts
with an LTI system to produce an output
Convolution between of an input signal x[n] with a
system having impulse response h[n] is given as,
where * denotes the convolution
x [ n ] * h [ n ] = x [ k ] h [ n - k ]](https://image.slidesharecdn.com/digitalsignalprocessing-171227110317/85/Digital-signal-processing-12-320.jpg)
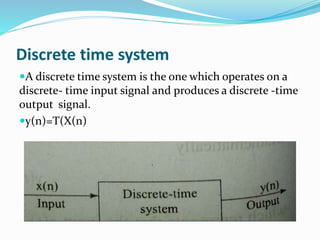
![EXAMPLE
Convolution
We can write x[n] (a periodic function) as an infinite
sum of the function xo[n] (a non-periodic function)
shifted N units at a time](https://image.slidesharecdn.com/digitalsignalprocessing-171227110317/85/Digital-signal-processing-13-320.jpg)
![Properties of convolution
Commutative…
x1[n]* x2[n] = x2[n]* x1[n]
Associative…
{x1[n]* x2 [n]}* x3[n] = x1[n]*{x2 [n]* x3[n]}
Distributive…
{x1[n] *x2[n]}* x3[n] = x1[n]x3[n] * x2[n]x3[n]](https://image.slidesharecdn.com/digitalsignalprocessing-171227110317/85/Digital-signal-processing-14-320.jpg)


![EXAMPLE OF DFT
Find X[k]
We know k=1,.., 7; N=8](https://image.slidesharecdn.com/digitalsignalprocessing-171227110317/85/Digital-signal-processing-20-320.jpg)




























![Digital Signal Processing[ECEG-3171]-Ch1_L03](https://cdn.slidesharecdn.com/ss_thumbnails/dspl3-180427094423-thumbnail.jpg?width=640&height=640&fit=bounds)