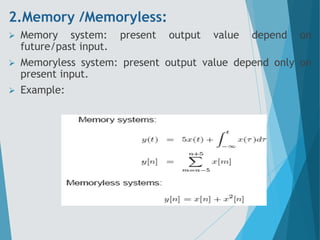
This document provides an overview of signals and systems classification. It discusses:
1) Signals can be continuous-time or discrete-time, periodic or non-periodic, deterministic or random, even or odd.
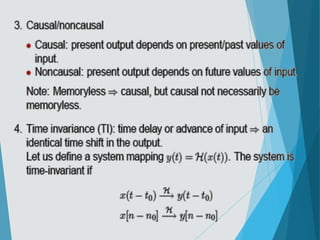
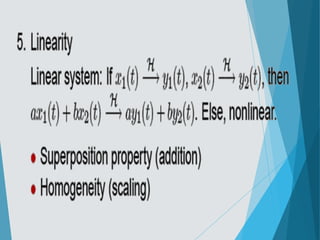
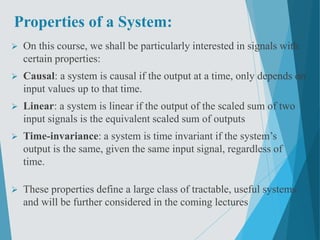
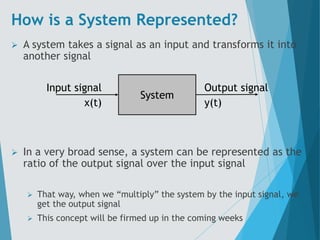
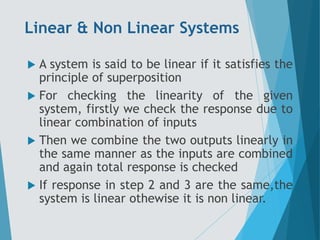
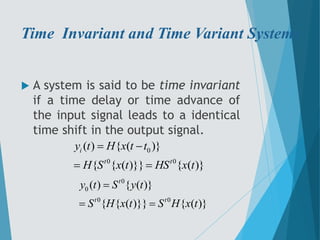
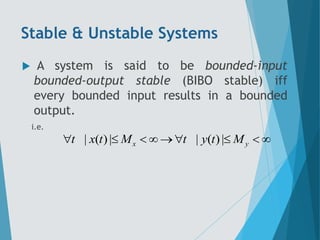
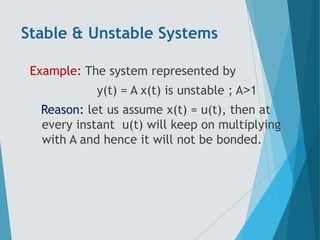
2) Systems can be causal or non-causal, linear or nonlinear, time-invariant or time-variant, stable or unstable.
3) Key system properties include memory/memoryless, and examples of discrete-time systems are presented.
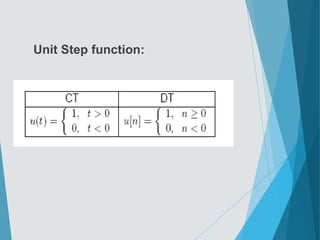
![Continuous time (CT) &
discrete time (DT) signals:
CT signals take on real or complex values as a
function of an independent variable that ranges over
the real numbers and are denoted as x(t).
DT signals take on real or complex values as a
function of an independent variable that ranges over
the integers and are denoted as x[n].
Note the subtle use of parentheses and square
brackets to distinguish between CT and DT signals.](https://image.slidesharecdn.com/ssppt-170414031953-220801113925-f72ca710/85/ssppt-170414031953-pdf-5-320.jpg)

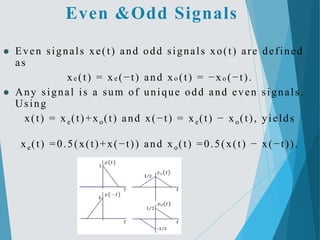
![Even:
x(−t) = x(t)
x[−n] = x[n]
Odd:
x(−t) = −x(t)
x[−n] = −x[n]
Any signal x(t) can be expressed as
x(t) = xe(t) + xo(t) )
x(−t) = xe(t) − xo(t)
where
xe(t) = 1/2(x(t) + x(−t))
xo(t) = 1/2(x(t) − x(−t))
Even &Odd Signals:](https://image.slidesharecdn.com/ssppt-170414031953-220801113925-f72ca710/85/ssppt-170414031953-pdf-11-320.jpg)

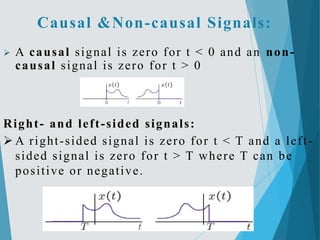
![Causal Systems
Causal system : A system is said to be causal
if the present value of the output signal
depends only on the present and/or past
values of the input signal.
Example: y[n]=x[n]+1/2x[n-1]](https://image.slidesharecdn.com/ssppt-170414031953-220801113925-f72ca710/85/ssppt-170414031953-pdf-20-320.jpg)
![Non-causal Systems
Non-causal system : A system is said to be
anticausal if the present value of the output signal
depends only on the future values of the input
signal.
Example: y[n]=x[n+1]+1/2x[n-1]](https://image.slidesharecdn.com/ssppt-170414031953-220801113925-f72ca710/85/ssppt-170414031953-pdf-21-320.jpg)
![Linear Time-Invariant Systems
Special importance for their mathematical tractability
Most signal processing applications involve LTI systems
LTI system can be completely characterized by their
impulse response
[ ]
k
k
k k
y n T x n T x k n k Linearity
x k T n k x k h n Time Inv
k
x k h n k x k h k
](https://image.slidesharecdn.com/ssppt-170414031953-220801113925-f72ca710/85/ssppt-170414031953-pdf-24-320.jpg)
![Memoryless System
A system is memoryless if the output y[n] at every value
of n depends only on the input x[n] at the same value of n
Example :
Square
Sign
counter example:
Ideal Delay System
2
]
n
[
x
]
n
[
y
]
n
[
x
sign
]
n
[
y
]
n
n
[
x
]
n
[
y o
](https://image.slidesharecdn.com/ssppt-170414031953-220801113925-f72ca710/85/ssppt-170414031953-pdf-29-320.jpg)
![Discrete-Time Systems
Discrete-Time Sequence is a mathematical operation that maps a
given input sequence x[n] into an output sequence y[n]
Example Discrete-Time Systems
Moving (Running) Average
Maximum
Ideal Delay System
]}
n
[
x
{
T
]
n
[
y T{.}
x[n] y[n]
]
3
n
[
x
]
2
n
[
x
]
1
n
[
x
]
n
[
x
]
n
[
y
]
2
n
[
x
],
1
n
[
x
],
n
[
x
max
]
n
[
y
]
n
n
[
x
]
n
[
y o
](https://image.slidesharecdn.com/ssppt-170414031953-220801113925-f72ca710/85/ssppt-170414031953-pdf-30-320.jpg)