Recommended
PPTX
PPT
PPT
PDF
PDF
Morphological image processing
PPTX
PPTX
Image processing second unit Notes
PPT
morphological image processing
DOCX
Cryptography and Network Security Principles and Practice
PPTX
Security services and mechanisms
PPTX
Basic Relationships between Pixels- Digital Image Processing
PPTX
PPT
PPSX
Edge Detection and Segmentation
PPSX
Image Enhancement in Spatial Domain
PDF
PPTX
Digital Image restoration
PPTX
Image compression standards
PPTX
PPTX
PDF
4.intensity transformations
PPT
PPT
Chapter10 image segmentation
PPTX
Morphological image processing
PPT
Spatial domain and filtering
PPTX
Image Sensing and Acquisition.pptx
PDF
Digital Image Fundamentals
PPTX
Digital Image Fundamentals - II
PDF
Digital Image Processing - Image Restoration
PPTX
dip_UNIT3.pptx image processing unit 3 notes
More Related Content
PPTX
PPT
PPT
PDF
PDF
Morphological image processing
PPTX
PPTX
Image processing second unit Notes
PPT
morphological image processing
What's hot
DOCX
Cryptography and Network Security Principles and Practice
PPTX
Security services and mechanisms
PPTX
Basic Relationships between Pixels- Digital Image Processing
PPTX
PPT
PPSX
Edge Detection and Segmentation
PPSX
Image Enhancement in Spatial Domain
PDF
PPTX
Digital Image restoration
PPTX
Image compression standards
PPTX
PPTX
PDF
4.intensity transformations
PPT
PPT
Chapter10 image segmentation
PPTX
Morphological image processing
PPT
Spatial domain and filtering
PPTX
Image Sensing and Acquisition.pptx
PDF
Digital Image Fundamentals
PPTX
Digital Image Fundamentals - II
Similar to Digital Image Processing Inverse Filters
PDF
Digital Image Processing - Image Restoration
PPTX
dip_UNIT3.pptx image processing unit 3 notes
PPT
PPTX
PPTX
NOISE FILTERS IN IMAGE PROCESSING
PPT
Image pre processing-restoration
PPTX
Av 738 - Adaptive Filtering Lecture 1 - Introduction
PPTX
PDF
PDF
PPTX
Image Enhancement in Frequency Domain Chap4_IEFD_HDR.pptx
PDF
PPTX
IMAGE PROCESSING--image restoration.pptx
PPT
digital image processing ImageRestoration.ppt
PPT
ImageRestorationTalkImageRestorationTalkImageRestorationTalkImageRestorationT...
PDF
Advance in Image and Audio Restoration and their Assessments: A Review
PDF
Deblurring Image and Removing Noise from Medical Images for Cancerous Disease...
PDF
Popular image restoration technique
PDF
ADVANCE IN IMAGE AND AUDIO RESTORATION AND THEIR ASSESSMENTS: A REVIEW
PDF
COMPUTER VISION CHAPTER 4 PARTthis ppt 3.pdf
Recently uploaded
PDF
Digital Transformation, AI, and ML in Pharma R&D and Manufacturing Workflows ...
PDF
2025-CB-NCAE-slide-deck.pptx-1 new kamote
PDF
Application of ICT Lecture 6 Digital Citizenship and Online Etiquette.pdf
PDF
Application of ICT Lecture 2 Basic ICT Productivity Tools.pdf
PDF
BỘ 20 ĐỀ THI GIẢ LẬP MỨC ĐỘ 9+ KỲ THI TỐT NGHIỆP TRUNG HỌC PHỔ THÔNG NĂM 2026...
PPTX
DIGITAL TRANSFORMATION MODULE KEY POINTS
PPTX
Prepositions of Place : English Grammar Presentation
PPTX
Mixing Pharmaceutical Engineering .pptxx
PPTX
SPECIAL STSAINS USED IN HISTOPATHOLOGY.pptx
PPTX
LEARNING PART 2.SHILPA HOTAKAR PSYCHOLOGY NOTES pptx
PDF
how to write your (written) research instruments
PDF
Introduction to Pharmacology-Definition, scope, Historical landmark Nature an...
PPTX
Pharmaceutical organic chemistry II :unit V - Cycloalkanes
PPTX
How to Configure Discount Code in Odoo 18 Sales
PPTX
CHAPTER NO.6 PLANT FIBRES USED AS SURGICAL DRESSINGS.pptx
PPTX
English 8 Q3 Wk6.pptx prewriting opinion editorial article
PPTX
No Storage Needed! Odoo Cross-Docking
PPTX
How to Manage Credit Limits in Odoo 18 Accounting
PPTX
How to use sorted() method in Odoo 18
PPTX
How to use filtered() method in Odoo 18
Digital Image Processing Inverse Filters 1. 2. 3. 4. 5. 6. 29
pseudo-inverse filtering
[Jain, Fig 8.10]
To mitigate the effect of zeros in the degradation function, we have:
in reality, we often have
H(u,v) = 0, for some u, v. e.g. motion blur
noise N(u,v) ≠ 0
7. 30
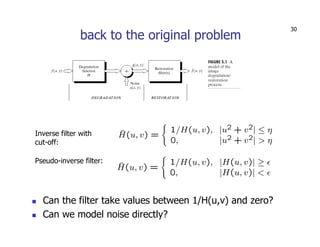
back to the original problem
Can the filter take values between 1/H(u,v) and zero?
Can we model noise directly?
Pseudo-inverse filter:
Inverse filter with
cut-off:
8. 31
Wiener filter
goal: restoration with expected minimum mean-square error (MSE)
optimal solution (nonlinear):
restrict to linear space-invariant filter
find “optimal” linear filter W(u,v) with min. MSE …
Derived by Norbert Wiener ~1942, published in 1949
Wiener, Norbert (1949), Extrapolation, Interpolation, and Smoothing of Stationary Time Series. New York: Wiley
9. 32
Wiener filter defined
If no noise, Sηη0
If no blur, H(u,v)=1 (Wiener smoothing filter)
More suppression on noisier frequency bands
Pseudo inverse filter
If K(u,v)|H(u,v)| for large u,v suppress high-freq.
10. 11.
![24
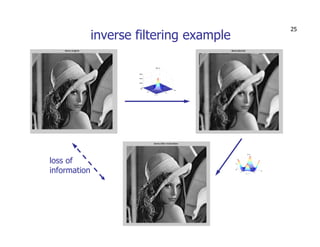
inverse filter
assume h is known: low-pass filter H(u,v)
inverse filter
recovered image
[EE381K, UTexas]
H(u,v)](https://image.slidesharecdn.com/lec71-250328170129-f98f9e86/85/Digital-Image-Processing-Inverse-Filters-1-320.jpg)



![29
pseudo-inverse filtering
[Jain, Fig 8.10]
To mitigate the effect of zeros in the degradation function, we have:
in reality, we often have
H(u,v) = 0, for some u, v. e.g. motion blur
noise N(u,v) ≠ 0](https://image.slidesharecdn.com/lec71-250328170129-f98f9e86/85/Digital-Image-Processing-Inverse-Filters-6-320.jpg)