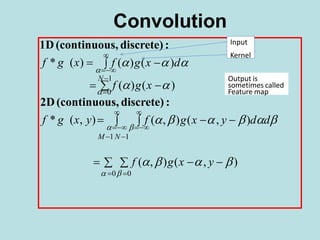
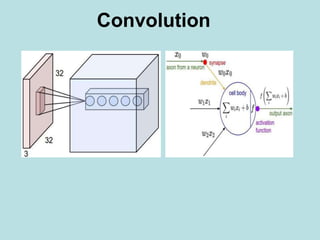
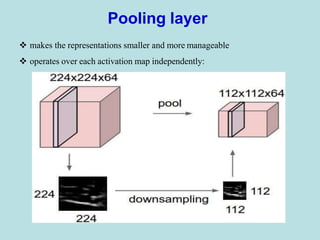
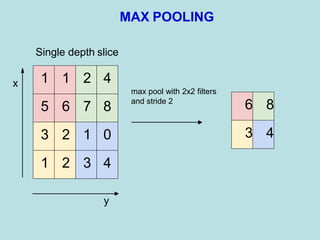
The document discusses deep learning and convolutional neural networks. It provides details on concepts like convolution, activation maps, pooling, and the general architecture of CNNs. CNNs are made up of repeating sequences of convolutional layers and pooling layers, followed by fully connected layers at the end. Convolutional layers apply filters to input images or feature maps from previous layers to extract features. Pooling layers reduce the spatial size to make representations more manageable.
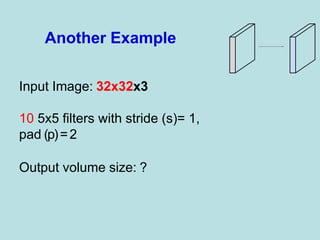
![Input volume: 32x32x3
10 5x5 filters with stride 1, pad 2
Output volume size:
[(32+2*2-5)/1+1]×[(32+2*2-5)/1+1] = 32×32
spatially, so
32x32x10
Output](https://image.slidesharecdn.com/deeplearning-200425115412/85/Deep-learning-12-320.jpg)
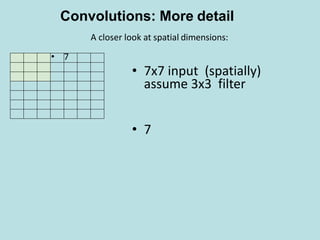
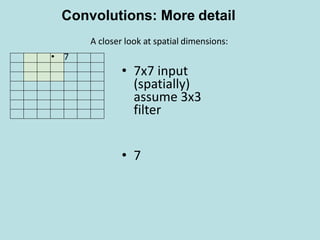
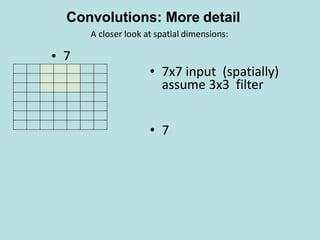
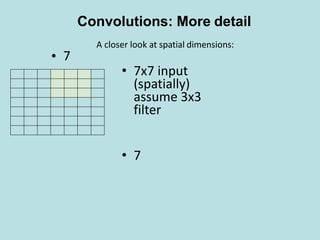
![7
• • 7x7 input (spatially)
assume 3x3 filter
7
A closer look at spatial dimensions:
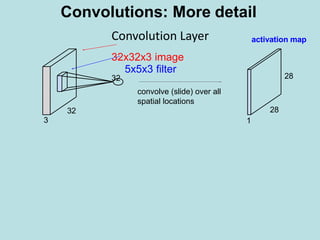
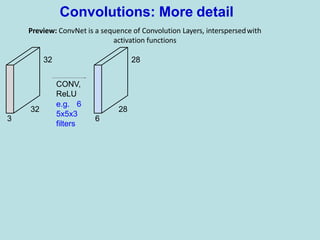
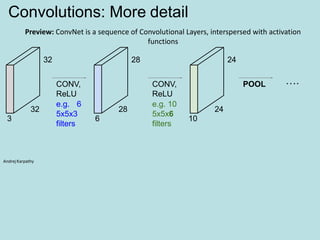
Convolutions: More detail
[(7+2*0-3)/1+1]×[(7+2*0-3)/1+1] = 5×5 Output](https://image.slidesharecdn.com/deeplearning-200425115412/85/Deep-learning-17-320.jpg)
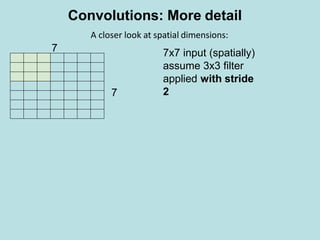
![7x7 input (spatially)
assume 3x3 filter
applied with stride
2
=> 3x3 output!
7
7
A closer look at spatial dimensions:
Convolutions: More detail
[(7+2*0-3)/2+1]×[(7+2*0-3)/2+1] = 3×3 Output](https://image.slidesharecdn.com/deeplearning-200425115412/85/Deep-learning-20-320.jpg)
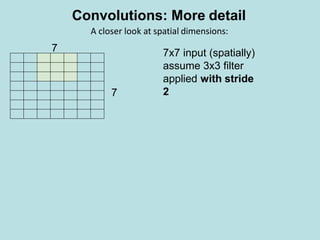
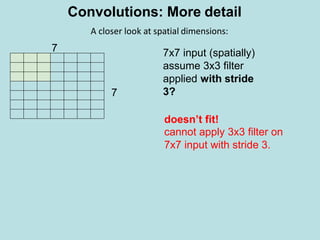
![7x7 input (spatially)
assume 3x3 filter
applied with stride
3?
7
7
A closer look at spatial dimensions:
Convolutions: More detail
[(7+2*0-3)/3+1]×[(7+2*0-3)/3+1] = [4/3+1]×[4/3+1] =2.33×2.33](https://image.slidesharecdn.com/deeplearning-200425115412/85/Deep-learning-21-320.jpg)
![In practice: Common to zero pad the border
0 0 0 0 0 0
0
0
0
0
e.g. input 7x7
3x3 filter, applied with stride 1
pad with 1 pixel border => what is theoutput?
Convolutions: More detail
[(7+2*1-3)/1+1]×[(7+2*1-3)/1+1] = 7×7 Output](https://image.slidesharecdn.com/deeplearning-200425115412/85/Deep-learning-23-320.jpg)
![In practice: Common to zero pad the border
e.g. input 7x7
3x3 filter, applied with stride 2
pad with 1 pixel border => what is theoutput?
0 0 0 0 0 0
0
0
0
0
Convolutions: More detail
[(7+2*1-3)/2+1]×[(7+2*1-3)/2+1] = 4×4 Output](https://image.slidesharecdn.com/deeplearning-200425115412/85/Deep-learning-24-320.jpg)
![In practice: Common to zero pad the border
0 0 0 0 0 0
0
0
0
0
Convolutions: More detail
e.g. input 7x7
3x3 filter, applied with stride 3
pad with 1 pixel border => what is theoutput?
[(7+2*1-3)/3+1]×[(7+2*1-3)/3+1] = 3×3 Output](https://image.slidesharecdn.com/deeplearning-200425115412/85/Deep-learning-25-320.jpg)
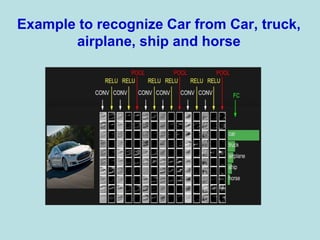
![[(CONVRELU)*NPOOL]*MFC
N: up to 5
M is Large
FC: Contains neurons that connect to the
entire input volume, as in ordinary Neural
Networks
General Architecture of CNNs](https://image.slidesharecdn.com/deeplearning-200425115412/85/Deep-learning-31-320.jpg)