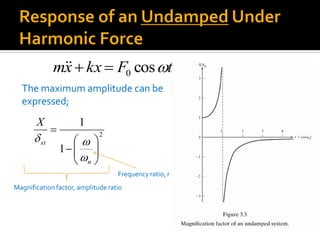
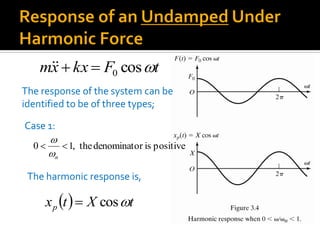
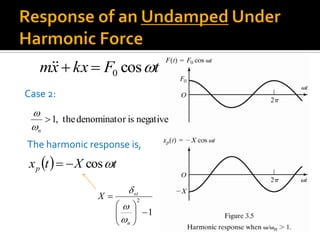
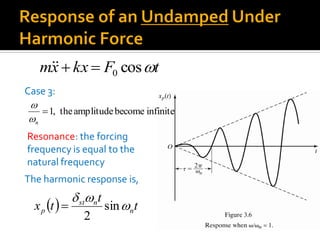
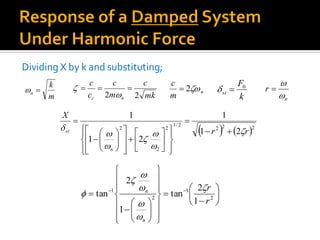
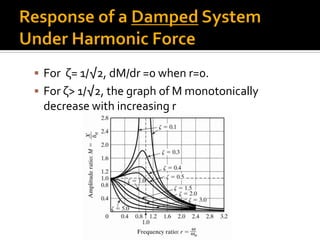
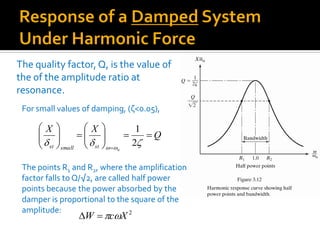
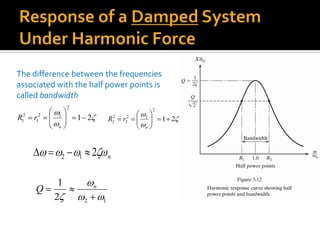
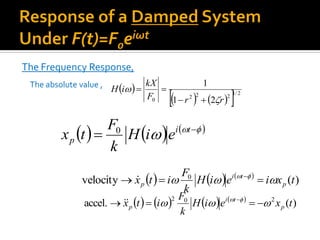
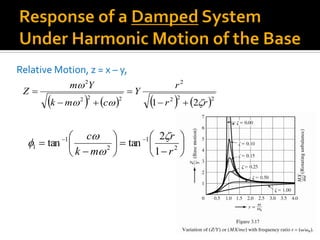
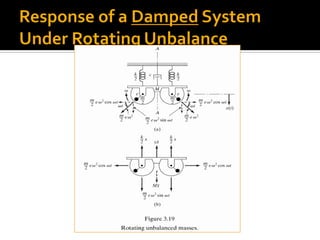
This chapter discusses forced vibration in mechanical systems. It defines forced vibration as when external energy is supplied to a system during vibration through an applied force or imposed displacement. The excitation can be harmonic, periodic but nonharmonic, nonperiodic, or random. Harmonic response and transient response are examined for a single degree of freedom system under harmonic excitation. Resonance is discussed, where the forcing frequency equals the natural frequency, causing infinite amplitude. The response of such a system is derived. Characteristics of the magnification factor and phase angle are also summarized.
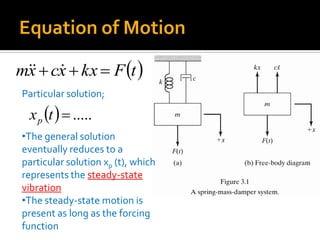
![tFkxxcxm cos0
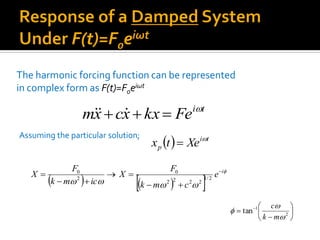
tFtF cos0
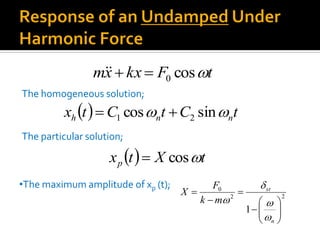
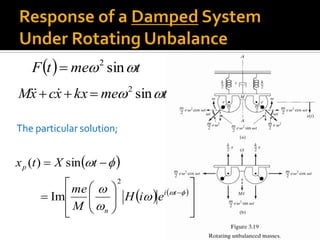
The particular solution;
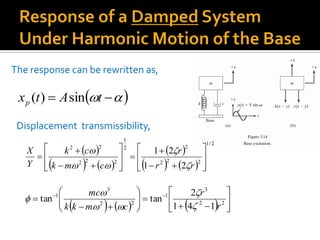
tXtxp cos)(
2/12222
0
][ cmk
F
X
2
1
tan
mk
c](https://image.slidesharecdn.com/harmonicallyexcitedvibration-170706184113/85/Harmonically-excited-vibration-20-320.jpg)

![
12/1222
22
sin
][
)( t
cmk
ckY
txp
2
1
1 tan
mk
c
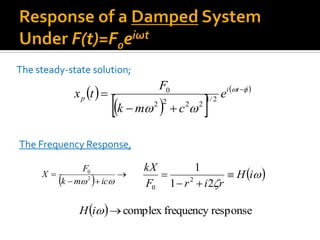
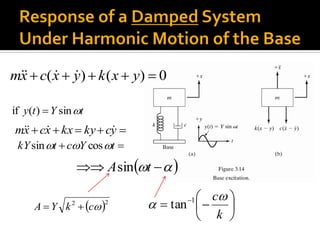
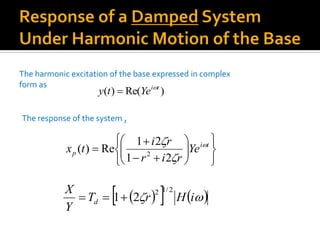
The steady state response of the mass,
k
c
1
tan](https://image.slidesharecdn.com/harmonicallyexcitedvibration-170706184113/85/Harmonically-excited-vibration-39-320.jpg)
![
iH
M
me
cMk
me
X
n
2/12222
2
][
2
1
tan
Mk
c
iHr
rr
r
me
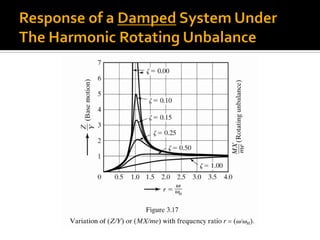
MX 2
222
2
21
2
1
1
2
tan
r
r
](https://image.slidesharecdn.com/harmonicallyexcitedvibration-170706184113/85/Harmonically-excited-vibration-58-320.jpg)