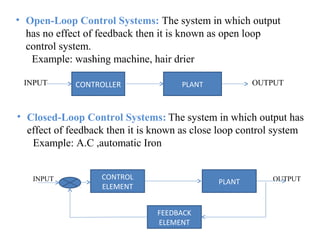
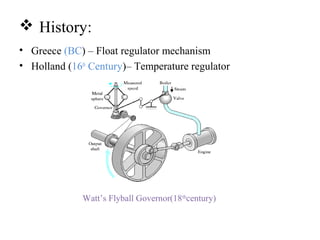
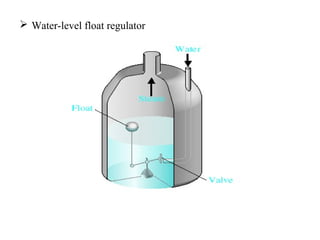
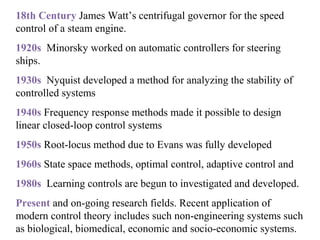
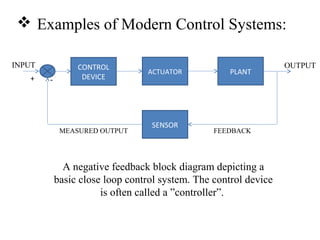
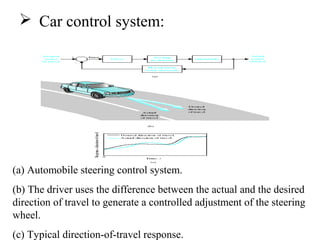
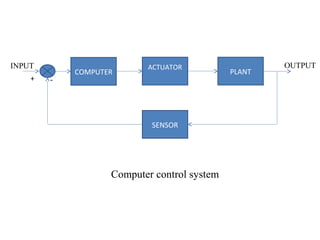
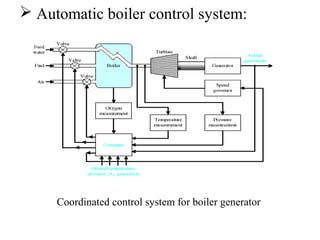
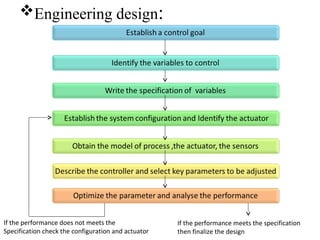
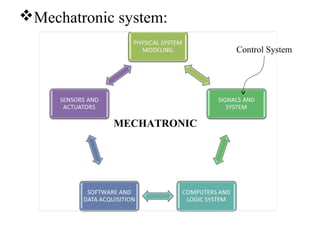
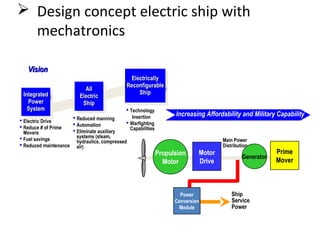
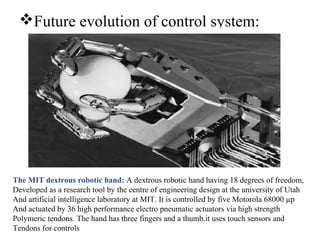
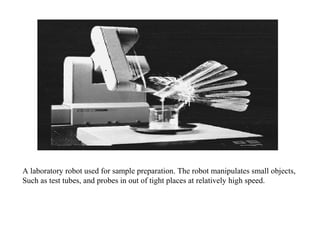
This document provides an introduction to control systems engineering. It discusses the history of control systems from ancient Greek regulators to modern applications. Control systems are classified as open-loop or closed-loop depending on whether system output provides feedback. Examples of modern control systems include automobile steering, computer controls, and automatic boiler systems. The engineering design process for control systems is outlined. Mechatronic systems integrate control systems, electronics, and mechanical components. Future developments include more integrated electric ship propulsion and dextrous robotic hands.