Downloaded 25 times


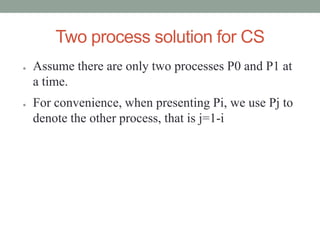

![Algorithm 2
Do{
flag[i] = true;
while(flag[j])'
Critical section
flag[i]=false;
Remainder section;
}while(1);](https://image.slidesharecdn.com/csproblemrepaired-120307014039-phpapp01/85/Cs-problem-repaired-7-320.jpg)
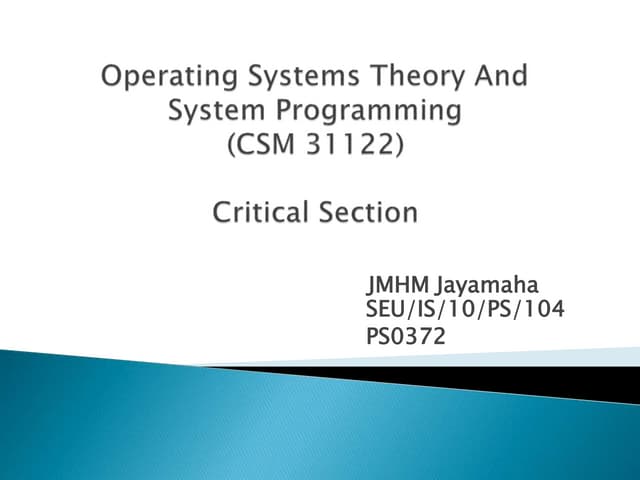
![Algorithm 2
● Boolean flag[2];
● If flag[i] is true, then P1 is allowed to enter its CS.
● Mutual exclusion is satisfied and progress is not
satisfied
● P0 sets flag[0]=true;
● P1 sets flag[1]=true;
● Both P0 and P1 are looping forever in their
respective while statements.](https://image.slidesharecdn.com/csproblemrepaired-120307014039-phpapp01/85/Cs-problem-repaired-8-320.jpg)
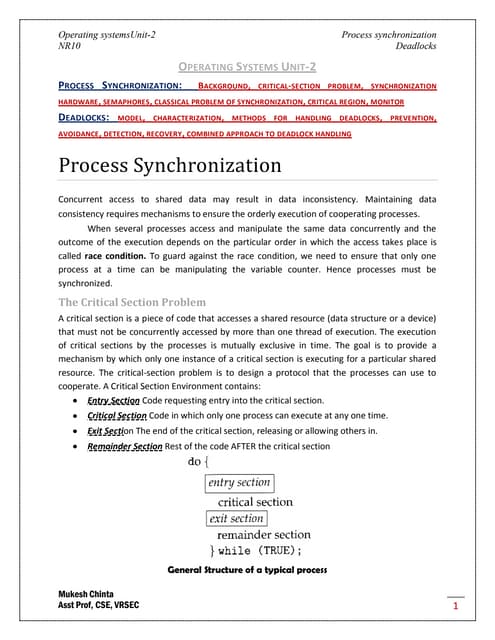
![Algorithm 3
● The processes share two variables
● Boolean flag[2]
● Int turn;
● Initial values of flag[0] and flag[1] is false and turn
value either 0 or 1 (immaterial)
● All the three are satisfied
● Progress
● Mutual exclusion
● Bounded waiting](https://image.slidesharecdn.com/csproblemrepaired-120307014039-phpapp01/85/Cs-problem-repaired-9-320.jpg)
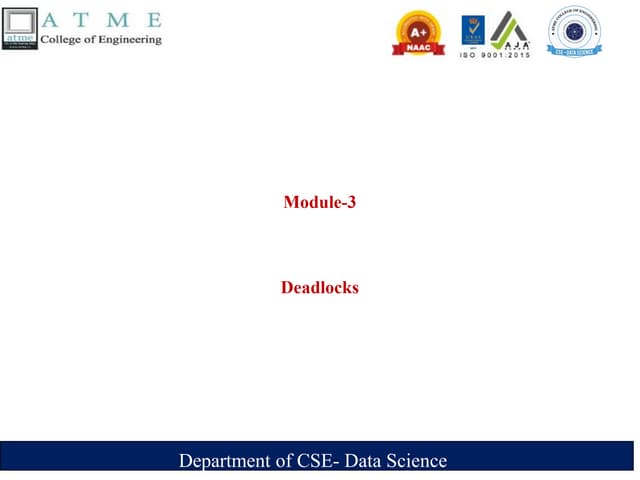
![Algorithm 3
Do{
flag[i]=true;
turn=j;
while(flag[j] && turn ==j);
Critical section
flag[i]=false;
Remainder section
}while(1);](https://image.slidesharecdn.com/csproblemrepaired-120307014039-phpapp01/85/Cs-problem-repaired-10-320.jpg)
![Algorithm 3
● Pi can enter its CS only when either flag[j]=false
and turn=i
● And if P0 and P1 change the flag[0] and flag[1]
simultaneously to true and wanted to execute its
CS, then turn =0 or 1 can happen only one at a
time, so progress is satisfied.](https://image.slidesharecdn.com/csproblemrepaired-120307014039-phpapp01/85/Cs-problem-repaired-11-320.jpg)



















![Dining Philosophers Algorithm
Semaphore chopstick[5]={1};
Int I;
Room=4;
Void philosopher(int i)
{
While(TRUE){
Think();
Wait(room);
Wait(chopstick[i]);
Wait (chopstick[i+1]%5);
Eat();
signal(chopstick[i+1]%5);
signal(chopstick[i]);
Signal(room);
}
}](https://image.slidesharecdn.com/csproblemrepaired-120307014039-phpapp01/85/Cs-problem-repaired-31-320.jpg)





The document discusses the critical section problem in operating systems and algorithms to solve it. The critical section problem occurs when multiple processes need exclusive access to a shared resource. Three key properties must be satisfied by any solution: mutual exclusion, progress, and bounded waiting. The document presents and analyzes several algorithms to solve the problem for two processes, including using flags and turn-taking variables. It also introduces semaphores as a synchronization primitive and discusses their implementation and usage to solve the critical section problem.















































![4.3 Deadlock [Autosaved].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/4-240110141412-065668f6-thumbnail.jpg?width=640&height=640&fit=bounds)