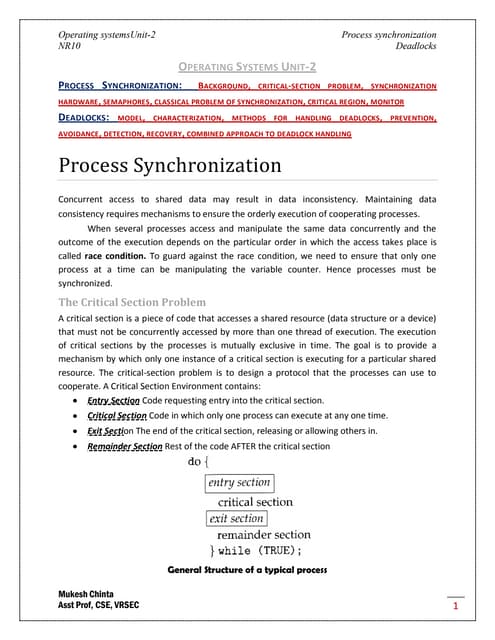
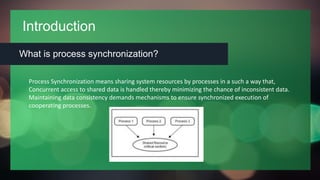
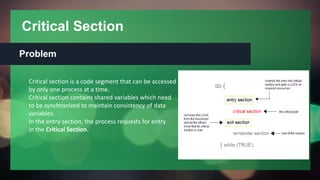
This document discusses various techniques for process synchronization. It begins by defining process synchronization as coordinating access to shared resources between processes to maintain data consistency. It then discusses critical sections, where shared data is accessed, and solutions like Peterson's algorithm and semaphores to ensure only one process accesses the critical section at a time. Semaphores use wait and signal operations on a shared integer variable to synchronize processes. The document covers binary and counting semaphores and provides an example of their use.
![Peterson’s Solution
Peterson’s Solution is a classical software based
solution to the critical section problem.
In Peterson’s solution, we have two shared variables:
• boolean flag[i] :Initialized to FALSE, initially no one is
interested in entering the critical section
• int turn : The process whose turn is to enter the
critical section.](https://image.slidesharecdn.com/processsynchronization-181220124327/85/Process-synchronization-6-320.jpg)