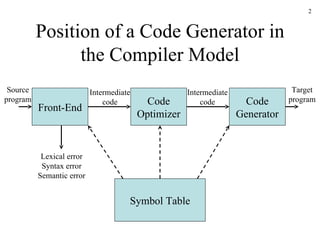
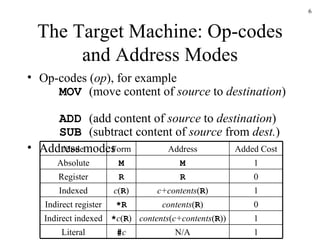
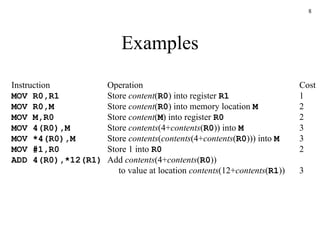
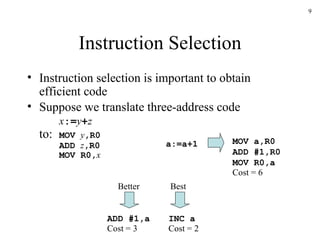
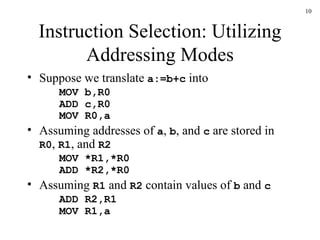
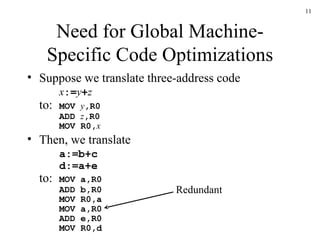
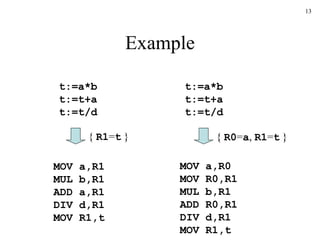
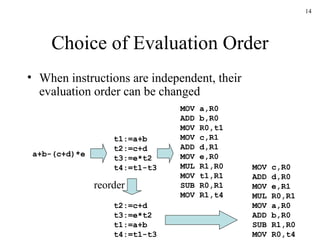
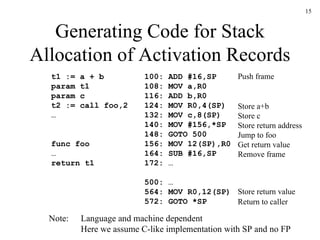
The document discusses code generation in compilers. It describes the position of a code generator in the compiler model, the different types of target code that can be generated, and considerations for the target machine like instruction sets and addressing modes. It also covers important aspects of code generation like instruction selection, register allocation, evaluation order, and generating code for function calls and stack allocation of activation records.