Download to read offline
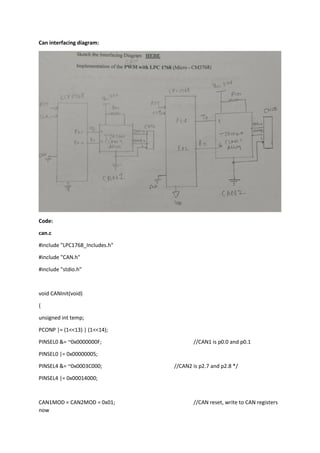









The document describes code for initializing and transmitting messages over a CAN bus on an LPC1768 microcontroller, including initializing the CAN controller, setting an acceptance filter to define which message IDs will be received, and sending a test message over CAN1 while monitoring reception on CAN2. Functions are defined for CAN initialization, setting the acceptance filter, and transmitting messages with given IDs and data over CAN1.














































































![Attack surfaces and attack tress[inform]](https://cdn.slidesharecdn.com/ss_thumbnails/lecture03-260108015941-a4dee53b-thumbnail.jpg?width=640&height=640&fit=bounds)




