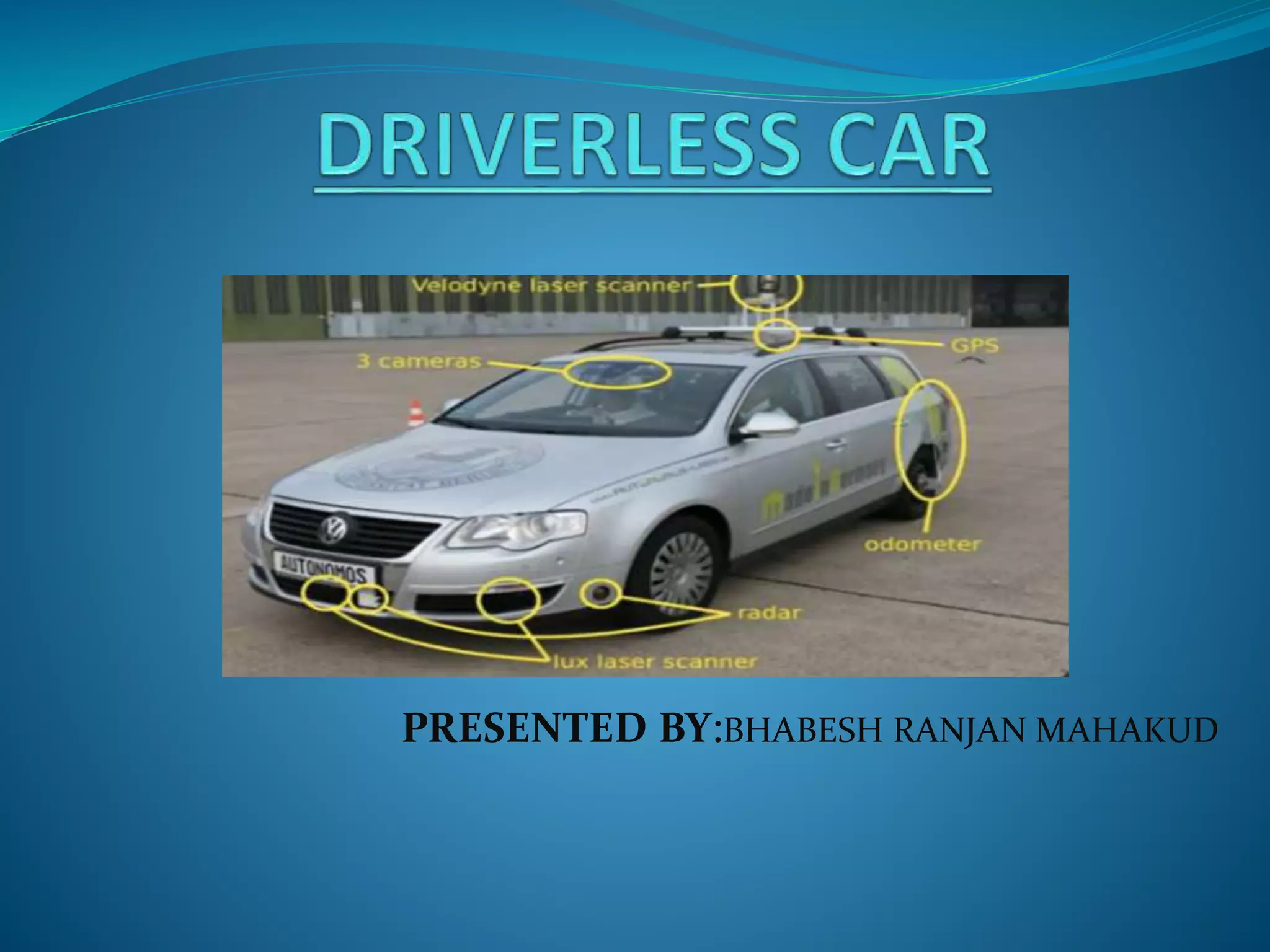
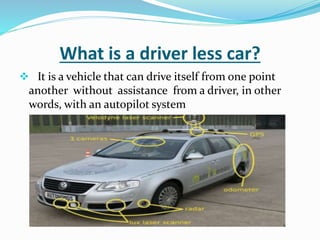
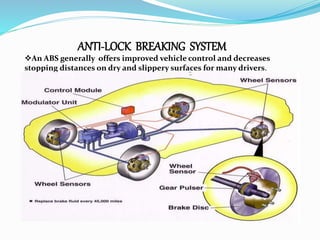
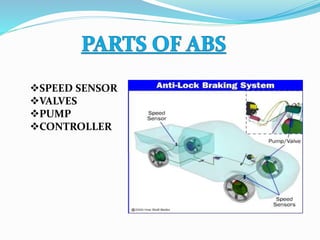
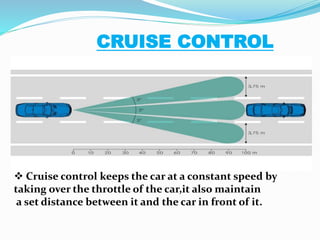
This document presents information on driverless cars. It discusses how driverless cars will use sensors to detect objects and traffic lights to slow or stop, reducing accidents. Technologies that enable fully autonomous vehicles are described, including ABS, ESC, cruise control, lane departure warning, self-parking. Automated guided vehicle systems are controlled by computers and GPS to determine location and manage traffic flow. While driverless cars could increase road safety, they may also introduce security risks if hackers are able to access vehicle controls remotely.























































![Getting Started with Apache Spark: Big Data Made Simple [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/apachesparkgettingstarted-260203175547-8361bcc3-thumbnail.jpg?width=640&height=640&fit=bounds)












