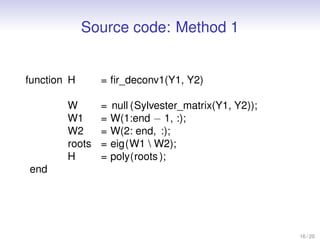
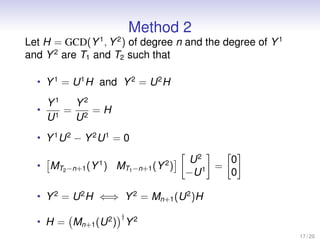
This document presents two methods for blind identification of finite impulse response (FIR) systems using a greatest common divisor (GCD) approach. It begins by introducing the blind system identification problem and GCD methods. It then outlines the main result that the impulse response h can be obtained from the GCD of the z-transforms of the output signals from two experiments with different input signals. The document proceeds to describe Method 1 and Method 2 for computing the GCD and recovering h. Both methods have a computational complexity of O(T3y) where Ty is the length of the signals. Future work is proposed to extend the GCD approach to noisy data and multivariate systems.













![Method 1: [w1 · · · wn] → (z1, . . . , zn)
• Let ker S(Y1)
, Y2
) = span(w1, . . . , wn)
• Define W = [w1 · · · wn], WG = VT (z)
• WG diag(z) = WG ← Shift-property
• WG diag(z) = WG
• G diag(z) G−1
= W†
W
• eig(W†
W) = (z1, . . . , zn) ← roots of the GCD
• H =
n
i=1
(z − zi)
15 / 20](https://image.slidesharecdn.com/1c6a95c3-885c-48d5-a912-713f61dce268-150714112647-lva1-app6892/85/BeneluxPPT-15-320.jpg)
![Source code: Method 2
function H = fir_deconv2(Y1, Y2)
M_Y1 = Multiplication_matrix (Y1, T2 − d + 1);
M_Y2 = Multiplication_matrix (Y2, T1 − d + 1);
M = [M_Y1 M_Y2];
z = null (M);
n = T2 + T1 − rank(Sylvester_matrix(Y1, Y2));
U2 = z(1:T2 − n + 1);
M_U2 = Multiplication_matrix (U2, n + 1);
H = M_U2 Y2;
end
18 / 20](https://image.slidesharecdn.com/1c6a95c3-885c-48d5-a912-713f61dce268-150714112647-lva1-app6892/85/BeneluxPPT-18-320.jpg)