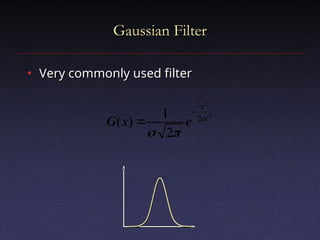
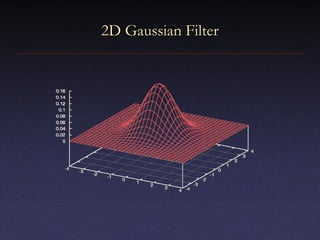
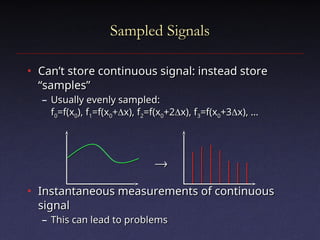
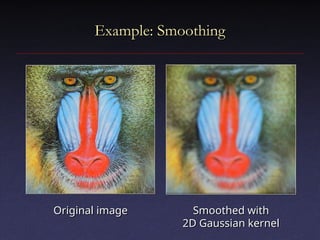
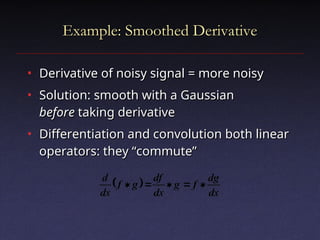
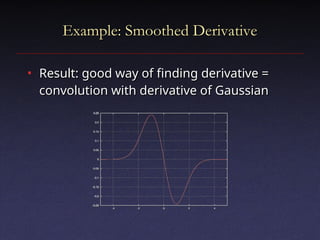
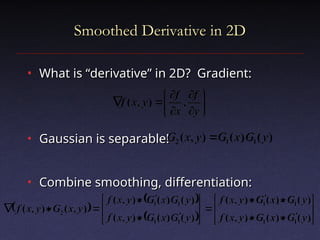
The document discusses digital signal processing, emphasizing concepts like filtering, convolution, and sampling to manage noisy signals. It explains the properties of linear shift-invariant filters and introduces Gaussian filters, highlighting their applications and advantages in smoothing signals. Additionally, the document covers Fourier transforms, detailing their role in analyzing frequency content and simplifying convolutions in signal processing.


![Fourier Series
Fourier Series
• Periodic function f(x) defined over [–
Periodic function f(x) defined over [–
..
..
]
]
where
where
1
0
2
1
)
sin(
)
cos(
)
(
n
n
n nx
b
nx
a
a
x
f
dx
nx
x
f
b
dx
nx
x
f
a
n
n
)
sin(
)
(
)
cos(
)
(
1
1](https://image.slidesharecdn.com/cos323s06lecture13sigproc-241119081641-06a42a9b/85/cos323_s06_lecture13_sigproc-bio-signal-processing-26-320.jpg)
![Fourier Series
Fourier Series
• This works because sines, cosines are
This works because sines, cosines are
orthonormal over [–
orthonormal over [–
..
..
]:
]:
• Kronecker delta:
Kronecker delta:
otherwise
0
if
1
0
)
cos(
)
sin(
)
sin(
)
sin(
)
cos(
)
cos(
1
1
1
n
m
dx
nx
mx
dx
nx
mx
dx
nx
mx
mn
mn
mn
](https://image.slidesharecdn.com/cos323s06lecture13sigproc-241119081641-06a42a9b/85/cos323_s06_lecture13_sigproc-bio-signal-processing-27-320.jpg)