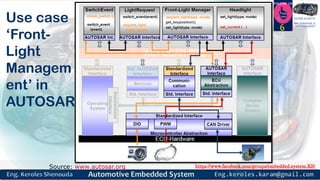
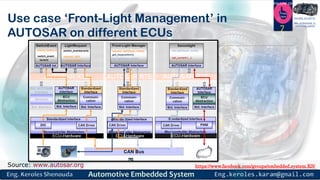
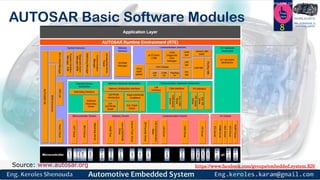
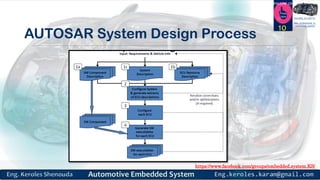
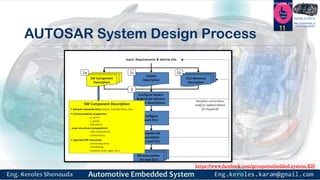
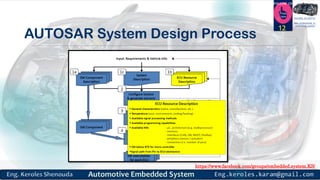
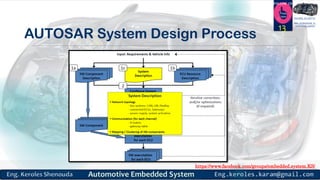
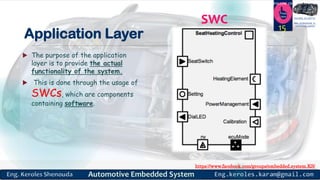
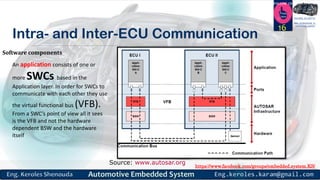
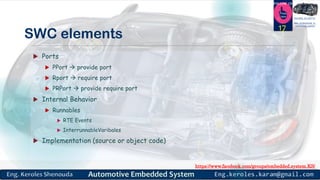
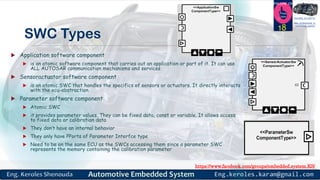
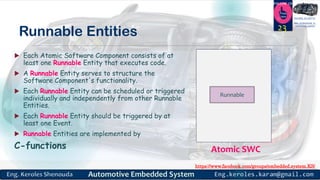
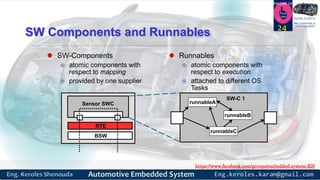
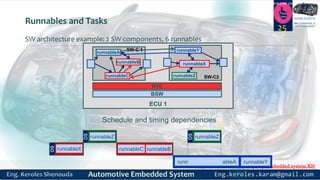
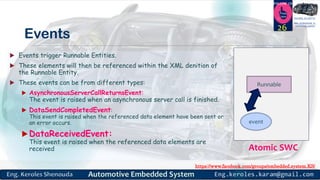
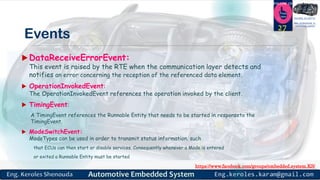
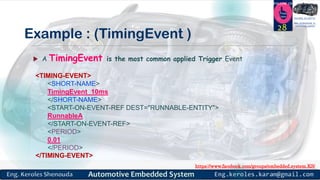
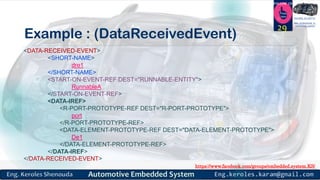
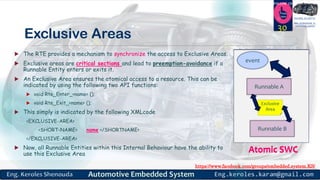
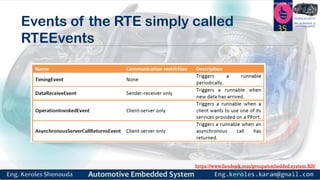
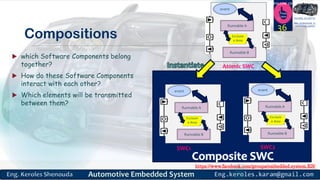
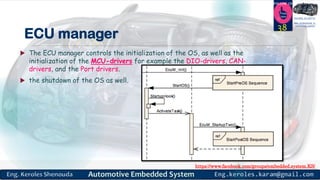
This document discusses the AUTOSAR application layer. It explains that the application layer provides the system functionality through software components (SWCs) that contain software. The document outlines different types of SWCs and their elements like ports, runnable entities, and events. It also discusses how SWCs communicate internally and across ECUs using the virtual functional bus. The mapping of runnable entities to operating system tasks is mentioned as the topic for the next session.