![ V = v cos (kt) + iv sin (kt)
Let's do similar calculus now:
V' = - kv sin (kt) + i kv cos (kt)
Looks even uglier, right? Well, let's rearrange V' a bit:
V' = -kv sin (kt) + i kv cos(kt)
= ik v cos(kt) - kv sin (kt) // switched terms
= (ik) [ v cos (kt) + iv sin (kt) ] // algebra I factoring
= (ik) V
So, now to take the derivative of V, we just multiply by (ik)!
Now, here's where things get strange. We had
dV/dt = CI
But now, for our half-real/half-imaginary sinusoid, we
know that V' = (ik) V. So, now, our capacitor works like this:
(ik) V = CI](https://image.slidesharecdn.com/electricalapplicationsandquaternions-170711140759/85/application-of-complex-numbers-3-320.jpg)
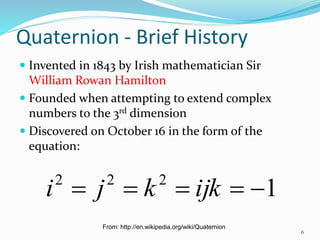
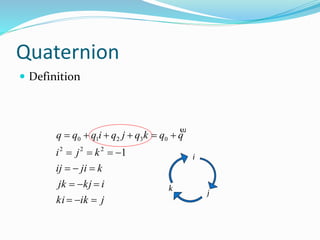
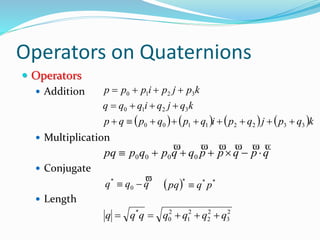
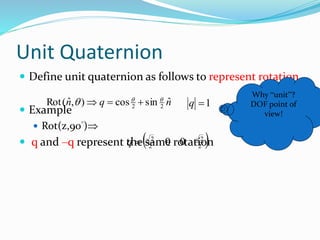

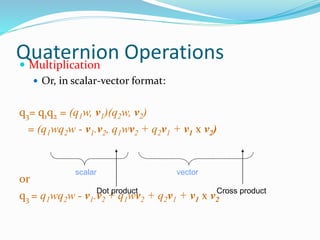
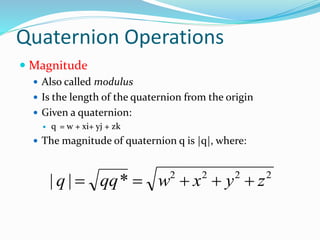
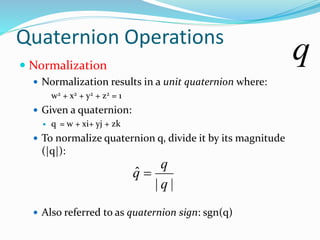
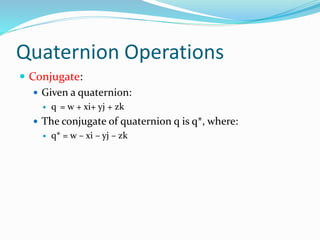
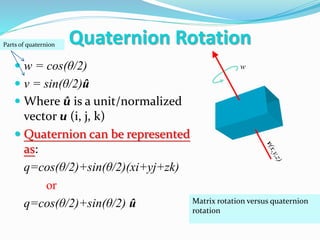
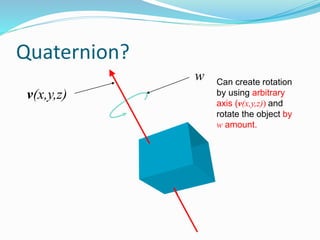
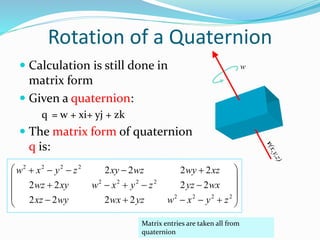
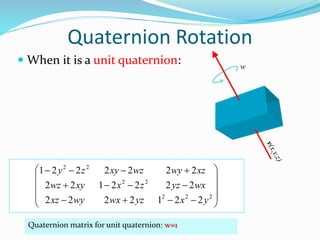
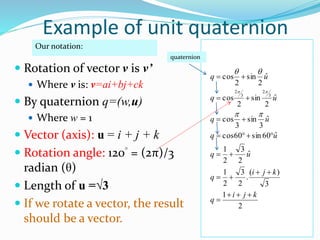
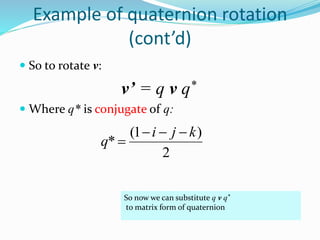
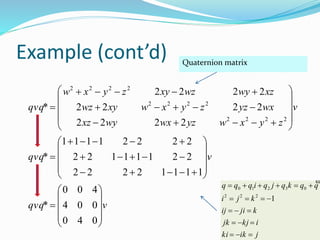

The document discusses quaternions and their applications. It begins by providing a brief history of quaternions, defined by Sir William Rowan Hamilton in 1843. Quaternions represent rotations and orientations in 3D space and are used in computer graphics, control theory, physics, and other fields due to advantages like avoiding gimbal lock. The document then covers details of quaternion operations like addition, multiplication, and rotation representations. It provides examples of using quaternions to represent and perform rotations in three dimensions.