


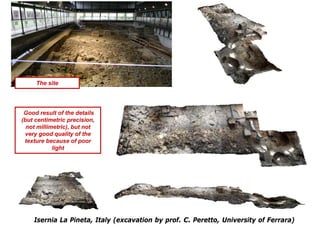
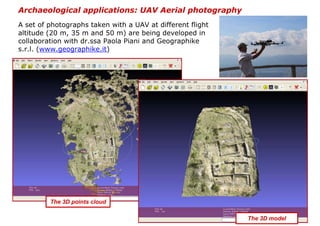
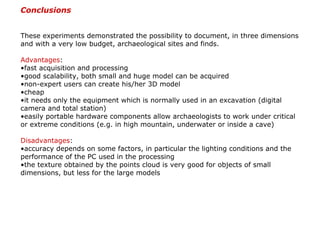

The document discusses the use of open-source tools and techniques for three-dimensional documentation in archaeology, emphasizing the capabilities of the Python Photogrammetry Toolbox (PPT) and Meshlab for creating 3D models from images. It highlights the advantages of these methods, including cost-effectiveness, ease of use, and the ability to achieve high accuracy in documenting archaeological sites. Additionally, the document presents various case studies showcasing the application of these techniques in real-world archaeological settings.

















































![2008 brokerage 03 scalable 3 d models [compatibility mode]](https://cdn.slidesharecdn.com/ss_thumbnails/2008brokerage03-scalable3dmodelscompatibilitymode-100413035231-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)










































