Downloaded 27 times











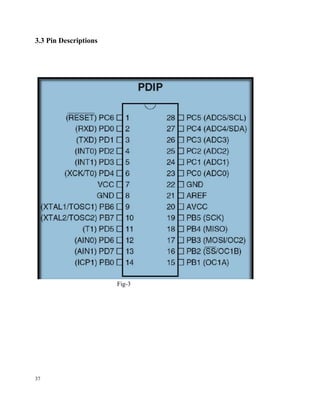





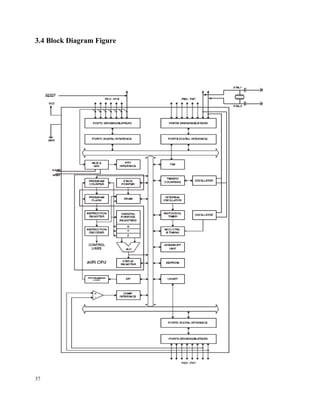
















This document is a project report for an automatic floor cleaner created by three students - Nadiminti Saroja Kumar, Digvijay Kumar, and Suravi Mahanta. It was submitted in partial fulfillment of the requirements for a Bachelor of Technology degree in electrical and electronics engineering. The report describes the design and implementation of a floor cleaner robot that can operate in both automatic and manual modes to perform sweeping and mopping tasks. It uses an ATmega8 microcontroller to control hardware and software operations through wireless communication with a remote control.


























































![ppt mini 1[1].pptxsddwsdssdsdsdsddssdssdsdd](https://cdn.slidesharecdn.com/ss_thumbnails/pptmini11-250815141227-c4368069-thumbnail.jpg?width=640&height=640&fit=bounds)




