Download as PDF, PPTX
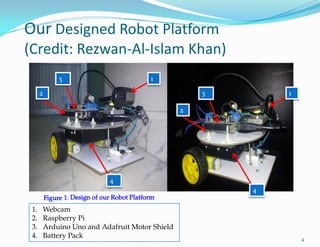

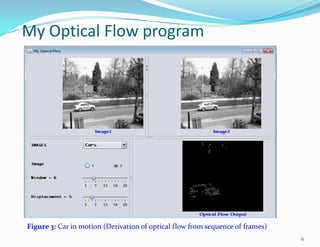
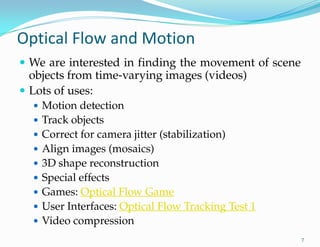
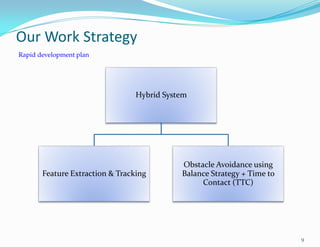
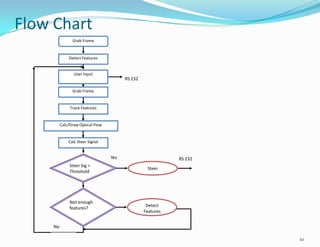

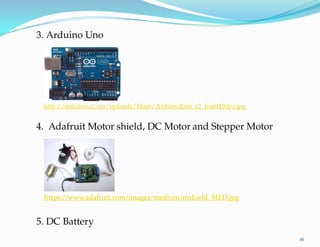


This document describes the design of a vision-based autonomous mobile robot. It includes: - The goal of building a low-cost, lightweight robot that can navigate autonomously using computer vision to avoid obstacles. - An overview of the robot's components, which include a Raspberry Pi computer, Arduino microcontroller, webcam, motors, and battery. - Descriptions of optical flow and how it will be used for motion estimation, obstacle avoidance, and navigation. The robot will track features, compute optical flow from video frames, and use this to steer safely. - Details on communicating steering signals from the Raspberry Pi to the Arduino controller over a serial TTY connection.



































































