1. The project involves the design and fabrication of a laser operated robot for pipe inspection. It will have a three finger mechanism and use LDR sensors to detect cracks in pipes using laser light reflection.
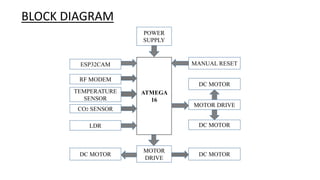
2. The robot will be controlled using a microcontroller and transmit video footage and sensor data to a laptop or mobile device for monitoring. It aims to inspect pipes in a fast, cost effective and safer manner compared to manual inspection.
3. Expected outcomes include a functional prototype robot that can accurately inspect pipes for defects and conditions while remaining compliant with inspection regulations to reduce environmental impacts during operations.












![• Christian, M., Simon, P., Leif, H., Kasper, L. and Zhenyu, Y. (2016). Subsea Infrastructure Inspection: A Review Study. proc. of
IEEE 6th International Conference on Underwater System Technology: Theory and Applications, 71-76.
• Iszmir, I., Adzly A., Khairul S., Mohd B., Muhammad J. and Juniza S. (2012). Development of In-pipe Inspection Robot: a Review.
Conference on Sustainable Utilization and Development in Engineering and Technology, 310- 315.
• Young, Kwon and Byung, Y. (2012). Design and Motion Planning of a Two-Module Collaborative Indoor Pipeline Inspection
Robot. IEEE Transactions On Robotics, volume 28, 681-696.
• Jong, K., Gokarna S., and S. I. (2010). FAMPER: A fully autonomous mobile robot for pipeline exploration. IEEE International
Conference on Industrial Technology , 517-523
• Aaqib Husain ,Sheik Fazil Amin , Mir Saquib Hussain (2018 ) 'Pipe inspection robot', International Research Journal of
Engineering and Technology, 05(07), pp. 280-281 [Online]. Available at: www.irjet.net › archives › IRJET-V5I749 (Accessed: 2-
05- 2020).
• Pooja G.M, Kavyashree MS, Niharika SN, Chandrashekhara G N (2018) 'Inpipe Inspection Robot', International Journal of
Engineering Research & Technology, 6(Special Issue -13), pp. 2-5 [Online]. Available at: https://www.ijert.org/research/inpipe-
inspection-robot-IJERTCONV6IS13101.pdf (Accessed: 2-05-2020).
• Ankit Nayak, Ankit Nayak (2014) 'Design of a New In-Pipe Inspection Robot', 12th GLOBAL CONGRESS ON MANUFACTURING
AND MANAGEMENT, GCMM 2014, (Procedia Engineering 97 ( 2014 ) ), pp. [Online]. Available at: www.sciencedirect.com
(Accessed: 02-05-2020).K. Elissa, “Title of paper if known,” unpublished.
• Data hand book (https://www.technico.com/pdf/blog/15%20Ball%20Screw.pdf).
References:](https://image.slidesharecdn.com/phase1presentation-1-240110172118-fa97a125/85/phase-1-presentation-1-pdf-23-320.jpg)















































