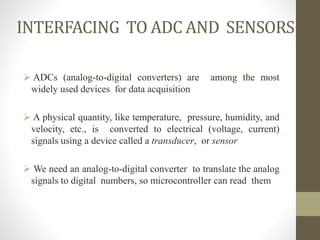
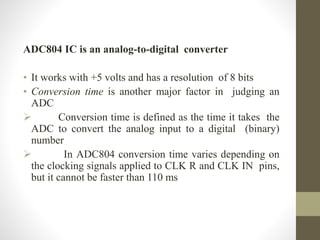
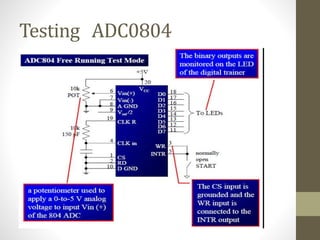
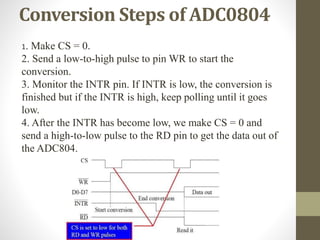
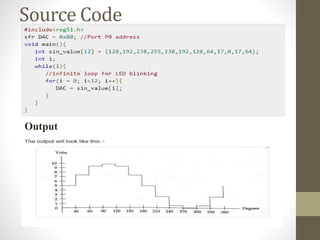
This document discusses interfacing an analog-to-digital converter (ADC) and digital-to-analog converter (DAC) with an 8051 microcontroller. It describes the ADC0804 and DAC0808 integrated circuits. The ADC0804 is an 8-bit ADC that converts analog voltages to 8-bit digital values. It has a resolution of 8-bits and a maximum conversion time of 110us. The DAC0808 is an 8-bit DAC that converts digital values to an analog current. Software is provided to generate a sine wave using the DAC and control a stepper motor by interfacing it with the microcontroller ports. Programs in C are given to read the switch status and rotate












































![Interfacing technique with 8085- ADC[0808]](https://cdn.slidesharecdn.com/ss_thumbnails/adc-160307140900-thumbnail.jpg?width=640&height=640&fit=bounds)



















![谷歌留痕技术 [ 𝙩𝙤𝙥 𝟮𝟯𝟯. 𝙘 𝙤𝙢 ]](https://cdn.slidesharecdn.com/ss_thumbnails/top233-260130174328-3833018c-thumbnail.jpg?width=640&height=640&fit=bounds)








