Download to read offline





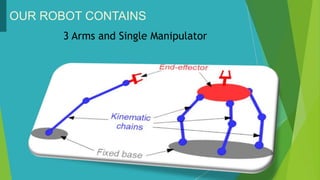






















This presentation describes a 3-armed robot designed for industrial automation applications. The robot aims to improve on previous single-armed robots by offering higher accuracy, speed, and safety. It utilizes servomotors, hydraulics, and pneumatics to power movable joints and complete tasks like picking, placing, drilling, and sorting. The designers highlight advantages like low cost, compact size, and energy efficiency. While the multi-armed design enhances functionality, ongoing work is needed to ensure stability and balance during operation.























































































