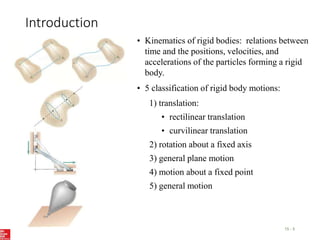
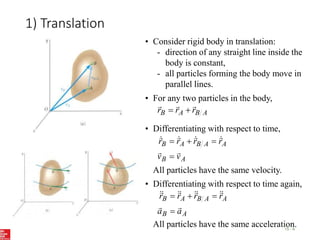
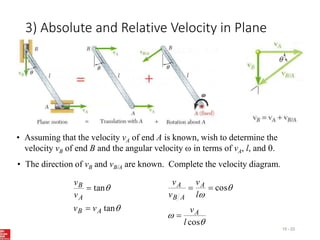
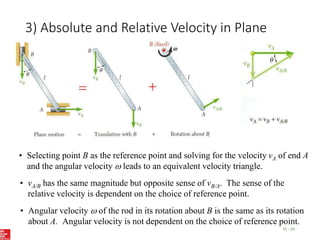
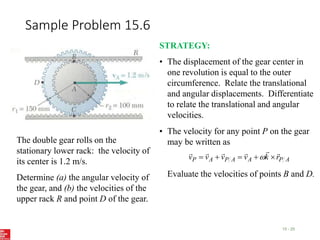
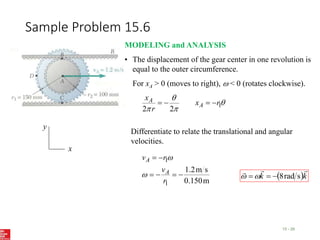
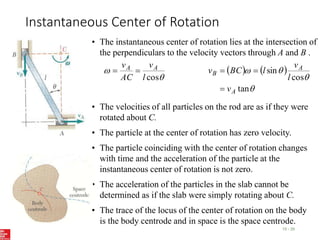
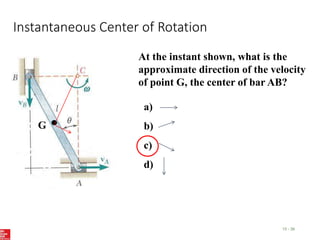
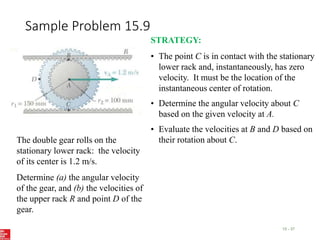
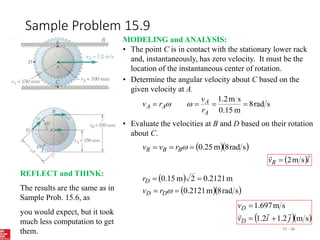
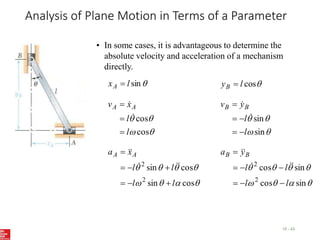
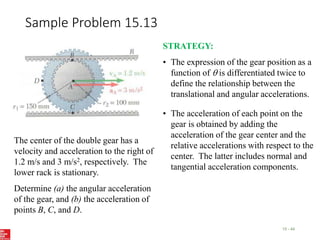
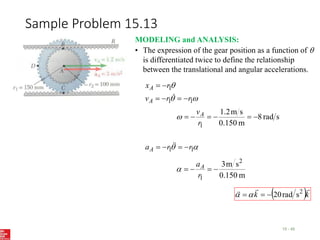
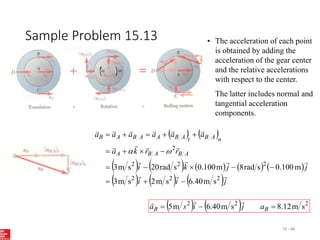
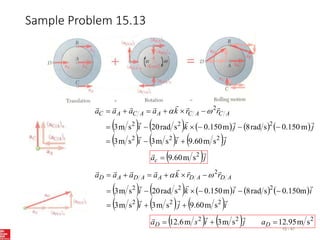
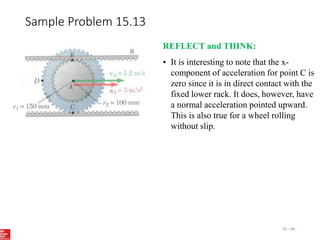
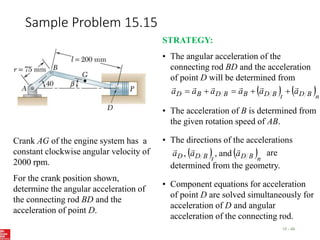
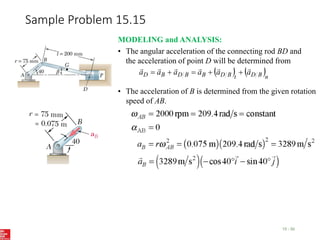
The document discusses kinematics of rigid bodies, including different types of motion such as translation, rotation about a fixed axis, and general plane motion. It provides equations to define velocity and acceleration for different types of rigid body motion. Sample problems are included to demonstrate how to analyze and calculate velocities, accelerations, angular velocities, and angular accelerations of points on rigid bodies undergoing various motions. Key concepts covered include absolute and relative velocity and acceleration in plane motion, and analyzing general plane motion as a combination of translation and rotation.




](https://cdn.slidesharecdn.com/ss_thumbnails/virtualworkmodifiedcompatibilitymode1-160126134241-thumbnail.jpg?width=640&height=640&fit=bounds)