1. Кинематика Лекция 11
2.3. Поступательное движение твердого тела
Движение твердого тела, при котором любая прямая, проведенная в
нем, остается параллельной своему первоначальному положению во
все время движения, называется поступательным.
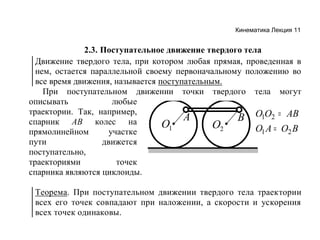
При поступательном движении точки твердого тела могут
описывать
любые
траектории. Так, например,
А
В O1O2 = AB
спарник АВ колес на
O1
O2
O1 A = O2 B
прямолинейном
участке
пути
движется
поступательно,
траекториями
точек
спарника являются циклоиды.
Теорема. При поступательном движении твердого тела траектории
всех его точек совпадают при наложении, а скорости и ускорения
всех точек одинаковы.
2. Кинематика Лекция 11
Доказательство. Прямая
АВ
при
поступательном
B
движении
остается
параллельной самой себе:
B1
(2.5)
AB = const .
rB
Очевидно,
что
для
z
rA
A
каждого момента времени
A1
O
rB = rA + AB .
(2.6) x
y
Отсюда следует, что в
каждый
момент
времени
положение точки В получается из положения точки А смещением на
постоянный вектор AB , т.е. траектория точки В одинакова с
траекторией точки А, но смещена относительно нее на вектор AB .
Продифференцировав равенство (2.6) по времени, получим
drB drA d AB
=
+
,
или VB = V A ,
(2.7)
dt
dt
dt
так как из (2.5) следует, что d AB dt = 0 .
3. Кинематика Лекция 11
Взяв производную по времени от равенства (2.7), получим
dV B dV A
=
,
или
aB = a A .
(2.8)
dt
dt
Теорема доказана, поскольку точки А и В в теле были выбраны
произвольным образом.
Из доказанной теоремы следует, что для определения
поступательного движения твердого тела достаточно рассмотреть
движение одной точки тела, которое может быть задано с помощью
одного из трех изученных ранее способов. Так, например, в
декартовой системе координат уравнения
x A = x A ( t ),
y A = y A ( t ),
zA = zA(t) ,
(2.9)
определяют в каждый момент времени положение точки А, а
следовательно, и поступательно движущегося тела, т.е. являются
уравнениями поступательного движения
4. Кинематика Лекция 11
2.4. Вращательное движение твердого тела
Движение твердого тела с двумя
Z z
неподвижными точками называется
вращательным.
Прямая АВ называется осью
В
вращения.
1. Уравнения движения
Положение
твердого
тела,
однозначно определяется углом ϕ . Этот
угол называется углом поворота тела.
ϕ =ϕ (t) .
Это равенство называется уравнением
или законом вращательного движения
твердого тела.
h
M
С
А
y
O
X
y
ϕ
Y
x
5. Кинематика Лекция 11
2. Угловая скорость и угловое ускорение
ϕ
(ω)cp =∆
z
∆
t
t 0
Предельное значение средней угловой скорости при ∆ → называется
угловой скоростью тела в данный момент времени:
∆ dϕ
ϕ
ω =lim
= =
ϕ
(2.13)
z
∆→ ∆
t 0 t
dt
Абсолютное значение (модуль) угловой скорости будем обозначать
через ω т.е. ω ω .
,
= z
Вектор угловой скорости ω направлен по оси вращения в ту сторону,
откуда видно вращение тела происходящим против хода часовой
стрелки.
Учитывая ранее введенное определение положительного отсчета
угла ϕ, вектор угловой скорости равен
ω ωk .
= z
(2.15)
6. Кинематика Лекция 11
( ε z ) cp = ∆ωz .
∆t
Предельное значение среднего углового ускорения при ∆t → 0
называется угловым ускорением тела в данный момент времени:
∆ωz dωz
(2.17)
ε z = lim
=
= ωz = ϕ .
∆ t →0 ∆ t
dt
Вектором углового ускорения называется вектор, равный
производной по времени от вектора угловой скорости:
dω dωz
(2.18)
ε=
=
k = εzk
dt
dt
7. Кинематика Лекция 11
3. Скорости и
ускорения точек
тела
V = Vτ = h ω z = hω
Вектор скорости
V = [ω , r ]
равен
Z z
C h
O
ω
ε
aτ = Vτ = hω z = hε z
V2
an =
ρ
= hω 2
2
a = aτ2 + an = h ε 2 + ω 4
Вектор полного
ускорения точки равен
a = aτ + an =
.
= [ ε , r ] + [ω ,[ω , r ] ]
A
O1
X
ϕ x
tgγ = aτ an = ε ω 2 .
a
an γ
r
aτ
M
α
y
ϕ
Y
V