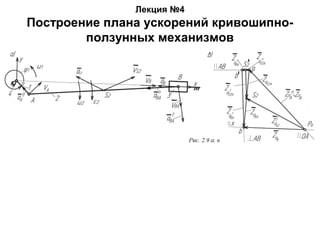
Документ описывает методику построения планов ускорений для кривошипно-ползунных механизмов, включая векторные уравнения для определения линейных и угловых ускорений звеньев механизма. Уделяется внимание нормальным, тангенциальным и кориолисовым ускорениям, а также графико-аналитическим методам для определения скоростей и ускорений центров тяжести. Приведены формулы и методы вычисления различных составляющих ускорений и скоростей звеньев, что позволяет проводить кинематический анализ механизмов с гидроцилиндром.