1. Кинематика Лекция 15
5. СЛОЖНОЕ ДВИЖЕНИЕ
ТВЕРДОГО ТЕЛА
5.1. Постановка задачи
z1
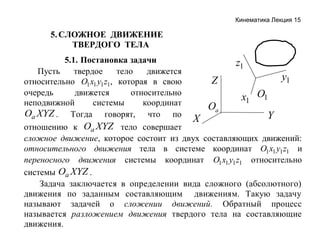
Пусть
твердое
тело
движется
y1
Z
относительно O1 x1 y1 z1, которая в свою
очередь
движется
относительно
x1 О1
неподвижной
системы
координат
Oa
Oa XYZ . Тогда говорят, что по
Y
X
отношению к Oa XYZ тело совершает
сложное движение, которое состоит из двух составляющих движений:
относительного движения тела в системе координат O1 x1 y1 z1 и
переносного движения системы координат O1 x1 y1 z1 относительно
системы Oa XYZ .
Задача заключается в определении вида сложного (абсолютного)
движения по заданным составляющим движениям. Такую задачу
называют задачей о сложении движений. Обратный процесс
называется разложением движения твердого тела на составляющие
движения.
2. Кинематика Лекция 15
5.2. Сложение поступательных движений
V1
Пусть
скорость
Vr
M
z1
поступательного движения твердого
тела
относительно
системы
координат O1 x1 y1z1 , а V2 – скорость
Z
y1
О1
поступательного движения системы
Ve
x1
O1 x1 y1 z1 относительно O XYZ .
Oa
Va
Y
Возьмем произвольную точку М X
тела, по теореме о сложении
скоростей: Va = Vr + Ve . Поскольку при поступательном движении
скорости всех точек одинаковы, то для любой точки М тела
ее
относительная скорость Vr = V1, а переносная скорость Ve = V2 .
Поэтому любая точка М имеет скорость
a
Va = V1 + V2
(5.1)
Так как все точки твердого тела имеют одинаковые скорости, то
его абсолютное движение является поступательным.
3. Кинематика Лекция 15
5.2. Сложение вращательных движений вокруг пересекающихся осей
Пусть
твердое
тело
совершает
вращательное движение вокруг оси O1 z1 с
Z
угловой скоростью ω 1 , которая вращается
M
вокруг оси Oa Z с угловой скоростью ω 2 . Оси
z1
составляющих вращений пересекаются в
Ω
точке А.
Тогда
ω 2
Va = [ ω 1 , AM ] + [ ω 2 , AM ] =
= [ ( ω 1 + ω 2 ) , AM ] = [ Ω , AM ]
(5.4)
A
ω1
x1
y1
Y
Из (5.4) следует, что скорость любой
Oa
X
точки тела на прямой, совпадающей с
направлением Ω , равна нулю.
Прямая, скорости точек которой равны нулю и положение которой изменяется в
пространстве, называется мгновенной осью вращения.
Из (5.4) вытекает, что распределение скоростей в твердом теле при сложении
двух вращений вокруг пересекающихся осей эквивалентно одному
вращательному движению вокруг мгновенной оси вращения с угловой скоростью
Ω = ω 1 + ω 2.
4. Кинематика Лекция 15
5.4. Сложение вращательных движений вокруг параллельных
осей
Z
z1
Пусть O1 z1 // Oa Z и ω 1 ≠ − ω 2 .
Сначала рассмотрим случай,
Ω
когда векторы ω 1 и ω 2 направлены
M
в одну сторону.
ω2
Vr = ω 1 , О1M , Ve = ω 2 , Оа M .
ω 1 y1
Здесь можно найти такую точку Р,
Р
О1
скорость которой будет равна нулю:
x1
( P)
Y
Oa
Va = ω 1 , O1P + ω 2 , Oа P = 0 (5.9) X
Тогда
Va = ω 1 , O1M + ω 2 , Oa M = ω 1 , ( O1P + PM ) + ω 2 , ( Oa P + PM ) =
(5.11)
= ( ω 1 + ω 2 ) , PM + ω 1 , O1P + ω 2 , Oа P = [ Ω , PM ] .
[
]
[
[
[
] [
[
] [
]
]
] [
] [
] [
] [
]
]
5. Кинематика Лекция 15
Из (5.11) следует, что при сложении двух вращений твердого тела
вокруг параллельныъх осей в одном направлении абсолютное
движение твердого тела является мгновенно вращательным с угловой
скоростью, направленной в сторону составляющих вращений и равной
сумме их угловых скоростей:
=
Ω (5.12)
= .
+
1
2, Ω
1+
2
Мгновенная ось вращения параллельна осям составляющих вращений
и проходит через точку Р, которая разбивает отрезок между этими
осями внутренним образом на части, обратно пропорциональные
величинам угловых скоростей этих вращений:
O1P
2
=
O1P =
Oa O1.
, Oa P +
(5.13)
Oa P
1
ω
ω
ω
ω
(
)
ωω
ω
ω
Аналогично рассматривается случай противоположных направлений
и 2.
1
6. Кинематика Лекция 15
Из (5.11) следует, что при сложении двух вращений твердого тела
вокруг параллельныъх осей в одном направлении абсолютное
движение твердого тела является мгновенно вращательным с угловой
скоростью, направленной в сторону составляющих вращений и равной
сумме их угловых скоростей:
=
Ω (5.12)
= .
+
1
2, Ω
1+
2
Мгновенная ось вращения параллельна осям составляющих вращений
и проходит через точку Р, которая разбивает отрезок между этими
осями внутренним образом на части, обратно пропорциональные
величинам угловых скоростей этих вращений:
O1P
2
=
O1P =
Oa O1.
, Oa P +
(5.13)
Oa P
1
ω
ω
ω
ω
(
)
ωω
ω
ω
Аналогично рассматривается случай противоположных направлений
и 2.
1