занятие7. распределение скоростей в теле совершающем плоское движение.
1. ЗАНЯТИЕ 7. РАСПРЕДЕЛЕНИЕ СКОРОСТЕЙ В ТЕЛЕ СОВЕРШАЮЩЕМ
ПЛОСКОЕ ДВИЖЕНИЕ.
Движение твердого тела называется плоскопараллельным или плоским, если все
точки тела перемещаются в неподвижных плоскостях, параллельных некоторой
неподвижной плоскости.
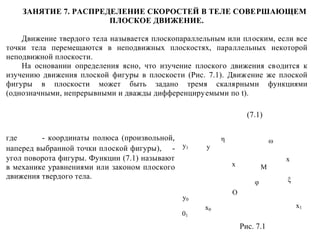
На основании определения ясно, что изучение плоского движения сводится к
изучению движения плоской фигуры в плоскости (Рис. 7.1). Движение же плоской
фигуры в плоскости может быть задано тремя скалярными функциями
(однозначными, непрерывными и дважды дифференцируемыми по t).
(7.1)
где
- координаты полюса (произвольной,
наперед выбранной точки плоской фигуры), - y1
угол поворота фигуры. Функции (7.1) называют
в механике уравнениями или законом плоского
движения твердого тела.
η
x
x
М
φ
ξ
О
y0
01
ω
y
x1
x0
Рис. 7.1
2. Найти распределение скоростей в плоской фигуре (найти скорость произвол ьной
точки М) можно с использованием теоремы о сложении скоростей в сложном
движении точки (4.1), если ввести поступательно движущиеся оси
, связанные с
фигурой лишь в полюсе. Тогда скорость точки М в ее относительном движении
вместе с вращающейся вокруг полюса фигурой (относительно осей
) будет
(7.2)
Вектор
направлен перпендикулярно радиусу МО в сторону вращения
(рис.7.1) угловая скорость
определяется с помощью третьей функции из (рис.7.1)
(
).
Переносной скоростью точки М фигуры в момент t будет вектор, равный
скорости той точки осей
, через которую в этот момент точка М проходит. Так как
оси
движутся поступательно, то
;
вектор
так как
(7.3)
находится с использованием первых двух функций из (7.1). Таким образом,
, то окончательно (учитывая (7.2) и (7.3)):
,
(7.4)
где
- скорость полюса, а
- скорость точки М во вращении вместе с плоской
фигурой вокруг полюса. Результат (7.4) – формула распределения скоростей в теле,
совершающем плоское движение.
3. В механике вводится понятие мгновенного центра скоростей (м.ц.с.) как
движущейся по фигуре точки, совпадающей в каждый момент с той её точкой Р,
скорость которой в этот момент равна нулю. При этом доказано, что в фигуре в
каждый момент времени существует единственная точка Р(
) и распределение
скоростей в фигуре в этот момент таково, как будто бы она вращается вокруг точки
Р:
, где
МР.
(7.5)
Существует несколько практических способов нахождения м.ц.с.:
10 Дано: , линия действия скорости точки В не параллельна вектору
Точка
Р
лежит
на
линии
пересечения
A
перпендикуляра к вектору
в точке А и
перпендикуляра к линии действия скорости точки В,
проведенного через точку В (Рис. 7.2). при этом, имеют
место формулы те же, что и для вращательного
движения:
и,
, позволяющие найти скорость
вообще, распределение
(Рис.7.2)
скоростей,
т.
P
M
е.
Рис. 7.2
.
B
ω
4. 20 Дано:
Точка Р лежит на линии пересечения прямой АВ и прямой, проведенной через
концы векторов
и
(Рис.7.3а). При этом,
.
Если
и
коллинеарны, но противонаправлены (Рис.7.3б), то точка В лежит
внутри отрезка АВ и ограничение
можно отменить.
30 Дано: , линия действия скорости точки В параллельна вектору
(Рис.7.4).
Мгновенного центра скоростей в конечной части плоскости не существует;
угловая скорость плоской фигуры в данный момент равна нулю (
) и
распределение скоростей в плоской фигуре в данный момент такое же как при
поступательном движении, т. е.
(М – произвольная точка фигуры). Это
мгновенное распределение скоростей называют мгновенно поступательным
движением.
A
A
B
P
ω
M
Рис. 7.3а
P
M
B
Рис. 7.3б
ω
5. 40 Дано: плоская фигура катится без проскальзывания по неподвижному
плоскому контуру.
Точка Р плоской фигуры, которая в данный момент касается точки
неподвижного контура и будет м.ц.с. (при качении без скольжения
)
(Рис.7.5). При этом:
.
A
A
М
B
ω
P
M
Рис. 7.4
Рис. 7.5
6. Задача 16.17 (И.В. Мещерский)
Определить скорость точки К четырехзвенного механизма ОАВО1 в положении,
указанном на рисунке, если звено ОА длинной 20см имеет угловую скорость 2с-1.
точка К расположена в середине (Рис.7.6) стержня ВО1.
Решение.
Звено ОА механизма совершает вращательное движение вокруг оси, проходящей
через точку О и перпендикулярной плоскости чертежа, а потому вектор скорости
точки А (Рис. 7.6) (вектор ) перпендикулярен
P
ОА и равен по модулю:
ωАВ
= ОА=2∙20=40см/с.
60º
60º
А
В
К
О1
Звено АВ совершает плоское движение.
30º
ω
Известна скорость точки А этого звена ( ) и
линия действия скорости точки В (точка В
О
принадлежит и вращающемуся звену ВО1, а
Рис. 7.6
потому её вектор скорости должен быть
перпендикулярен радиусу ВО1). Таким образом,
применим способ 1 (см. Рис. 7.2) нахождения м.ц.с.. Для звена АВ м.ц.с. (точка Р)
показан на Рис.7.6. имеют место соотношения:
АВР следует АР=ВР, а потому
звена ВО1, поэтому
см/с.
; из треугольника
=40см/с. Точка К – середина вращающегося
7. Задача 16.31 (И.В. Мещерский)
Колесо радиуса R=0,5м катится без скольжения по прямолинейному участку
пути; скорость центра его постоянна и равна v0=10см/с. Найти скорости концов М1,
М2, М3, М4 вертикального и горизонтального диаметров колеса. Определить его
угловую скорость (Рис.7.7).
Решение.
Колесо катится без проскальзывания, совершая
плоское движение. Очевидно, применим способ 4 (см.
Рис.7.5) нахождения м.ц.с. для нашей задачи м.ц.с. –
точка Р колеса касающаяся в данный момент
М4
прямолинейной опоры (Рис. 7.7). Тогда имеет место
соответствующая картина распределения скоростей и
соответствующие соотношения:
.
(7.6)
Из (7.6) получим:
м/с,
м/с,
м/с.
М3
ω
О
М1
М2
P
Рис. 7.7