The paper presents a mathematical model of an elastic pipeline, which are a hollow rod with the fluid (gas) runs inside it. The work devoted to the problem of the dynamic stability of the pipeline.
The paper presents a mathematical model of an elastic pipeline, which are a hollow rod with the fluid (gas) runs inside it. The work devoted to the problem of the dynamic stability of the pipeline.
Учебная компьютерная модель «сложение взаимно перпендикулярных колебаний» 200...Павел Ермолович
Целью данной работы является создание в рамках разработанного физического практикума обучающей программы и моделирование основных процессов колебательных движений .
Для реализации указанной цели необходимо было, на данном этапе, решить ряд задач:
Изучить процессы формирования фигур Лиссажу и выполнить расчеты для различных частотных и амплитудных параметров.
Сложение сложных взаимоперпендикулярных колебаний с различными частотами.
Освоить методику формирования и определения параметров фигур Лиссажу.
Создать программу для наблюдения и исследования фигур Лиссажу.
Найти перспективное применение данной тематики на практике.
Презентация лекции из Электронного учебно-методического комплекса "Начертательная геометрия", авторы Л.А. Голдобина, А.Л. Бочков.
Свидет. о гос. рег. № 17165 от 07.06.2011
Similar to занятие1. свободная материальная точка (16)
1. ЗАНЯТИЕ 1. СВОБОДНАЯ МАТЕРИАЛЬНАЯ ТОЧКА.
Задача 27.16 (И.В.Мещерский)
На какую высоту
и за какое время
поднимется тело веса ,
брошенное вертикально вверх со скоростью , если сопротивление воздуха
может быть выражено формулой
, где - величина скорости тела?
(1.3)
5) - постоянный вектор,
- вектор постоянного
направления, а его модуль зависит от квадрата модуля
текущей скорости.
6) Проекция уравнения (1.3) на ось OZ
z
H
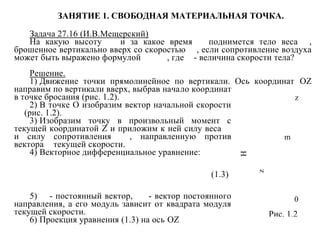
Решение.
1) Движение точки прямолинейное по вертикали. Ось координат OZ
направим по вертикали вверх, выбрав начало координат
в точке бросания (рис. 1.2).
z
2) В точке О изобразим вектор начальной скорости
(рис. 1.2).
3) Изобразим точку в произвольный момент с
текущей координатой Z и приложим к ней силу веса
и силу сопротивления
, направленную против
m
вектора текущей скорости.
4) Векторное дифференциальное уравнение:
0
0
Рис. 1.2
2. или
.
(1.4)
при
,
,
.
7) Момент времени
достижения точкой максимальной высоты
определяется обращением в ноль скорости её движения, поэтому
уравнение (1.4) необходимо преобразовать так, чтобы решая его, получить
зависимость
. Для этого необходимо ввести новую переменную
, что
приводит к дифференциальному уравнению с разделяющимися
переменными вида:
(1.5)
Решим уравнение (1.5) с учётом пределов изменения переменных
(1.6)
.
3. Для нахождения максимальной высоты подъёма точки, преобразуем
уравнение (1.5) так, чтобы, решая его, получить зависимость
. Для этого
необходимо перейти в нём к новой независимой переменной Z, умножая обе
его части на :
.
Учитывая, что
и, разделяя переменные, получим
.
(1.7)
Решим уравнение (1.7) с учётом пределов изменения переменных
(1.8)
8) Анализ полученных результатов (1.6) и (1.8) показывает, что с
увеличением начальной скорости
, максимальная высота
и время
подъёма
возрастают, а с увеличением коэффициента
силы
сопротивления эти параметры убывают, что соответствует физической
сущности явлений.
4. Задача 27.53 (И. В. Мещерский)
Определить движение тяжёлой материальной точки, масса которой равна
m, притягиваемой к неподвижному центру О силой, прямо пропорциональной
расстоянию. Движение происходит в пустоте; сила притяжения на единице
расстояния равна
; в момент
, причём ось
направлена по вертикали вниз.
y
Решение.
1) Ось
направим по вертикали вниз (по условию задачи), ось
горизонтали (Рис.1.3).
2) В начальный момент точка имеет
a
координаты
и
нулевую
начальную скорость.
x
0
3) В произвольный момент времени
положение точки определяется текущим
радиус-вектором
и на неё действует
сила тяжести
и сила притяжения
,
направленная к неподвижному центру .
4) Векторное
дифференциальное
m
уравнение :
(1.9)
y
Рис. 1.3
- по
x
5. 5)
- постоянный вектор, а сила притяжения
направлена всегда
против радиус-вектора , а её величина пропорциональна расстоянию точки
до центра. О (т.е. пропорциональна ) с коэффициентом
. Поэтому сила
притяжения может быть математически представлена в виде
(1.10)
Дифференциальное уравнение (1.9) с учётом (1.10) будет
или
(1.11)
6) Проектирование уравнения (1.11) на оси координат приводит к двум
независимым дифференциальным уравнениям с соответствующими
начальными условиями:
,
(1.12)
.
И
,
(1.13)
.
6. 7) Для решения поставленной задачи необходимо проинтегрировать
уравнения (1.12) и (1.13). Первое из них относится к линейным однородным
дифференциальным уравнениям, а второе- к линейным неоднородным
второго порядка. Методы решения таких уравнений известны. Начнём с
(1.12)
,
(1.14)
- характеристическое уравнение, корни которого
мнимые. Общее решение уравнения (1.14) будет
- чисто
,
(1.15)
где
и
-постоянные интегрирования подлежащие определению по
начальным условиям. Подставим в (1.15):
,
и найдём
,
.
Дифференцируем (1.15) по времени (находим проекцию скорости точки на
ось )
.
Подставляем в (1.16):
и находим
Таким образом, решение (1.15) с учётом найденных
.
(1.16)
,
и
будет
(1.17)
.
7. Решение неоднородного уравнения (1.13) приводится ниже:
-однородное уравнение, соответствующее уравнению (1.13) того же
типа, что и (1.14). Его общее решение
.
(1.18)
Частное решение уравнения (1.13) предлагается отыскать в виде
постоянной
.
(1.19)
Подставляя (1.19) в (1.13), получаем
.
Общее решение уравнения (1.13), складывающееся из (1.18) и (1.19) будет
.
(1.20)
Постоянные интегрирования
и
находим по начальным условиям.
,
.
Итак, решение (1.20) с учётом найденных
и
.
получается в виде
(1.21)
8. 8) Проанализируем полученные результаты. Во-первых, исключим
время из (1.17) и (1.21), а именно, находя из (1.17)
подставляя в (1.21), получим
(1.22)
т.е. траектория движущейся точки лежит на прямой. Так как
,
то траекторией будет лишь отрезок прямой (1.22) (рис.1.4). Итак, в условиях
поставленной задачи, точка будет совершать гармоническое колебание (1.17),
(1.21) периода
на отрезке прямой (1.22) (
).
0
-a
a
y
Рис. 1.4
x