Downloaded 20 times















![Chapter 1 15
*P1.57 Consider one cubic meter of gold. Its mass from Table 1.5 is 19 300 kg. One atom of gold has mass
m0
27
25
197 3 27 10
=
×
F
HG
I
KJ = ×
−
−
u
1.66 10 kg
1 u
kg
a f . .
So, the number of atoms in the cube is
N =
×
= ×
−
19 300
5 90 10
25
28
kg
3.27 10 kg
. .
The imagined cubical volume of each atom is
d3
28
29
1
5 90 10
1 69 10
=
×
= × −
m
m
3
3
.
. .
So
d = × −
2 57 10 10
. m .
P1.58 A N A
V
V
A
V
r
r
total drop
total
drop
drop
total
4
= =
F
HG
I
KJ =
F
H
GG
I
K
JJ
a fe j e j e j
π
π
3
3
2
4
A
V
r
total
total
3
2
m
m
m
=
F
HG I
KJ =
×
×
F
HG
I
KJ =
−
−
3
3
30 0 10
2 00 10
4 50
6
5
.
.
.
P1.59 One month is
1 30 24 3 600 2 592 106
mo day h day s h s
= = ×
b gb gb g . .
Applying units to the equation,
V t t
= +
1 50 0 008 00 2
. .
Mft mo Mft mo
3 3 2
e j e j .
Since 1 106
Mft ft
3 3
= ,
V t t
= × + ×
1 50 10 0 008 00 10
6 6 2
. .
ft mo ft mo
3 3 2
e j e j .
Converting months to seconds,
V t t
=
×
×
+
×
×
1 50 10 0 008 00 10
6 6
2
2
. .
ft mo
2.592 10 s mo
ft mo
2.592 10 s mo
3
6
3 2
6
e j
.
Thus, V t t
ft ft s ft s
3 3 3 2
[ ] . .
= + × −
0 579 1 19 10 9 2
e j e j .](https://image.slidesharecdn.com/12-solutionsserwayphysics6thedition-230806185121-ebd4e979/85/1-2-Solutions-Serway-Physics-6Th-Edition-15-320.jpg)





















































![70 Vectors
Additional Problems
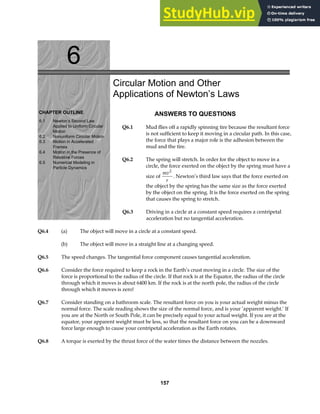
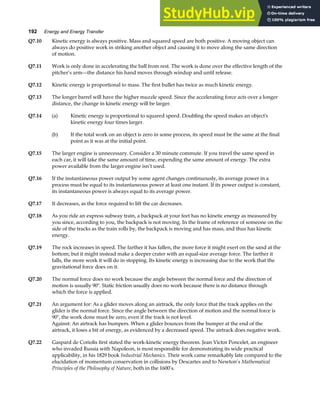
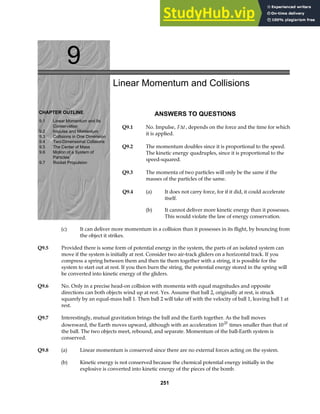
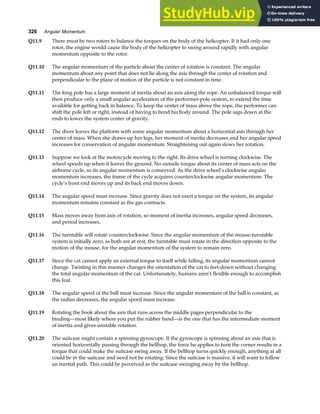
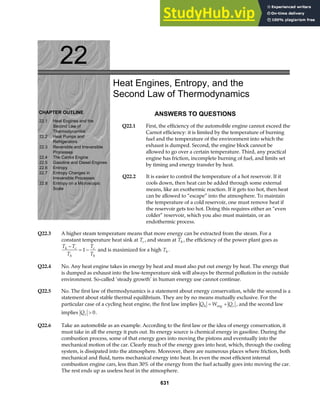
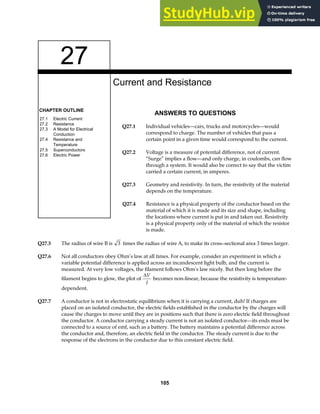
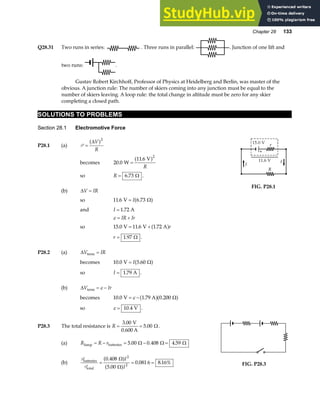
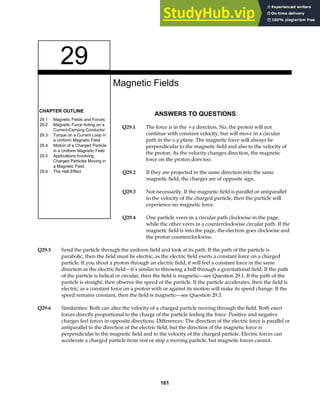
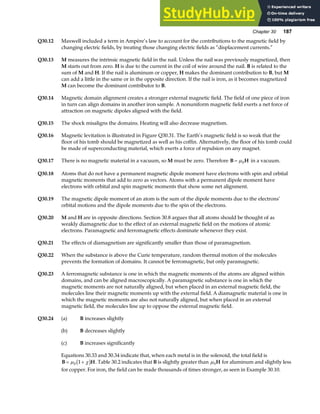
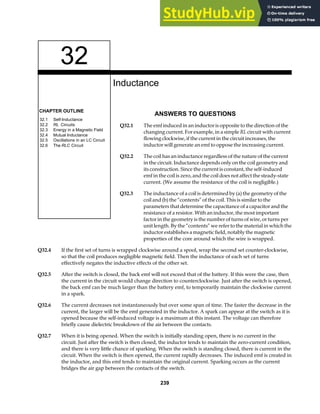
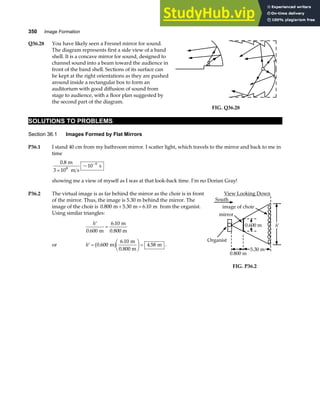
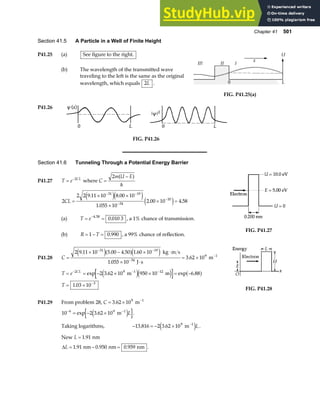
P3.51 Let θ represent the angle between the directions of A and B. Since
A and B have the same magnitudes, A, B, and R A B
= + form an
isosceles triangle in which the angles are 180°−θ ,
θ
2
, and
θ
2
. The
magnitude of R is then R A
=
F
HG I
KJ
2
2
cos
θ
. [Hint: apply the law of
cosines to the isosceles triangle and use the fact that B A
= .]
Again, A, –B, and D A B
= − form an isosceles triangle with apex
angle θ. Applying the law of cosines and the identity
1 2
2
2
− =
F
HG I
KJ
cos sin
θ
θ
a f
gives the magnitude of D as D A
=
F
HG I
KJ
2
2
sin
θ
.
The problem requires that R D
=100 .
Thus, 2
2
200
2
A A
cos sin
θ θ
F
HG I
KJ =
F
HG I
KJ. This gives tan .
θ
2
0 010
F
HG I
KJ = and
θ = °
1 15
. .
A
B
R
θ/2
θ
A
D –B
θ
FIG. P3.51
P3.52 Let θ represent the angle between the directions of A and B. Since
A and B have the same magnitudes, A, B, and R A B
= + form an
isosceles triangle in which the angles are 180°−θ ,
θ
2
, and
θ
2
. The
magnitude of R is then R A
=
F
HG I
KJ
2
2
cos
θ
. [Hint: apply the law of
cosines to the isosceles triangle and use the fact that B A
= . ]
Again, A, –B, and D A B
= − form an isosceles triangle with apex
angle θ. Applying the law of cosines and the identity
1 2
2
2
− =
F
HG I
KJ
cos sin
θ
θ
a f
gives the magnitude of D as D A
=
F
HG I
KJ
2
2
sin
θ
.
The problem requires that R nD
= or cos sin
θ θ
2 2
F
HG I
KJ =
F
HG I
KJ
n giving
θ =
F
HG I
KJ
−
2
1
1
tan
n
.
FIG. P3.52](https://image.slidesharecdn.com/12-solutionsserwayphysics6thedition-230806185121-ebd4e979/85/1-2-Solutions-Serway-Physics-6Th-Edition-69-320.jpg)





![76 Vectors
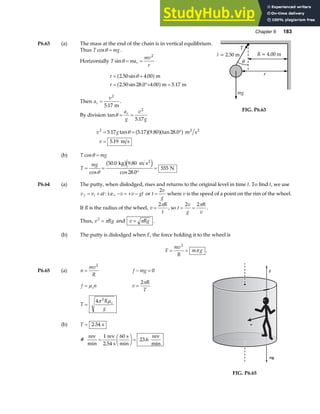
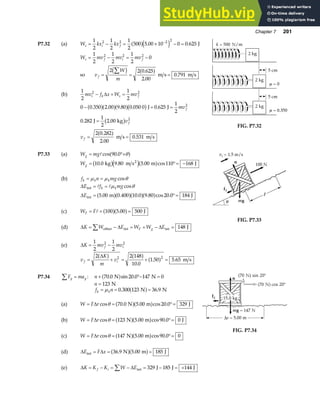
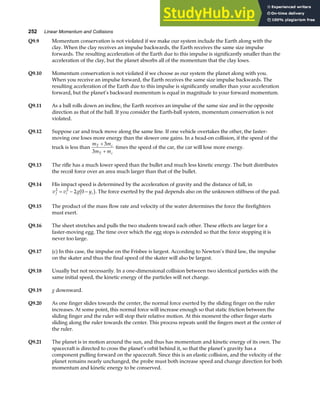
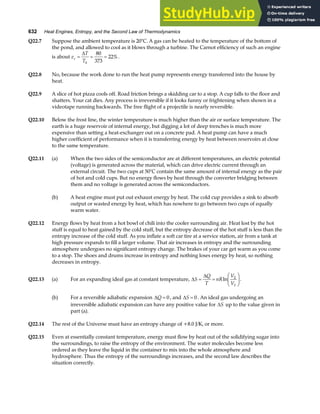
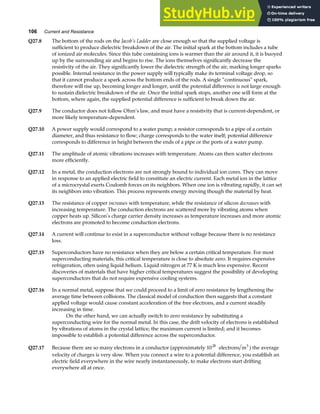
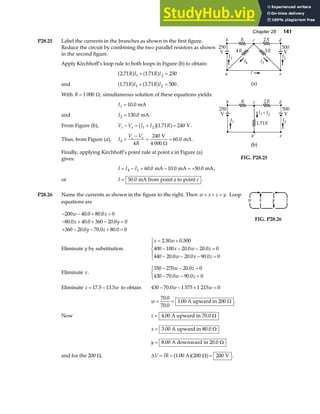
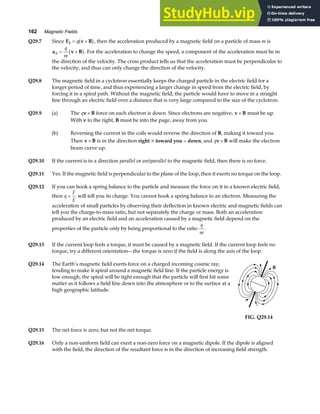
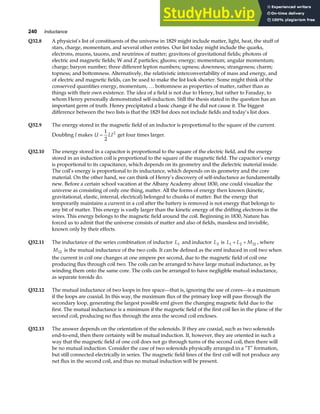
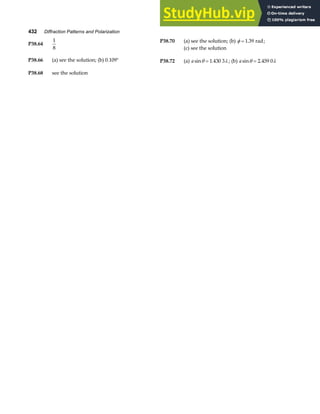
P3.65 Since
A B j
+ = 6 00
. ,
we have
A B A B
x x y y
+ + + = +
b g e j
.
i j i j
0 6 00
giving
FIG. P3.65
A B
x x
+ = 0 or A B
x x
=− [1]
and
A B
y y
+ = 6 00
. . [2]
Since both vectors have a magnitude of 5.00, we also have
A A B B
x y x y
2 2 2 2 2
5 00
+ = + = . .
From A B
x x
=− , it is seen that
A B
x x
2 2
= .
Therefore, A A B B
x y x y
2 2 2 2
+ = + gives
A B
y y
2 2
= .
Then, A B
y y
= and Eq. [2] gives
A B
y y
= = 3 00
. .
Defining θ as the angle between either A or B and the y axis, it is seen that
cos
.
.
.
θ = = = =
A
A
B
B
y y 3 00
5 00
0 600 and θ = °
53 1
. .
The angle between A and B is then φ θ
= = °
2 106 .](https://image.slidesharecdn.com/12-solutionsserwayphysics6thedition-230806185121-ebd4e979/85/1-2-Solutions-Serway-Physics-6Th-Edition-75-320.jpg)















![Chapter 4 93
P4.24 From the instant he leaves the floor until just before he lands, the basketball star is a projectile. His
vertical velocity and vertical displacement are related by the equation v v a y y
yf yi y f i
2 2
2
= + −
d i.
Applying this to the upward part of his flight gives 0 2 9 80 1 85 1 02
2
= + − −
vyi . . .
m s m
2
e ja f . From this,
vyi = 4 03
. m s. [Note that this is the answer to part (c) of this problem.]
For the downward part of the flight, the equation gives vyf
2
0 2 9 80 0 900 1 85
= + − −
. . .
m s m
2
e ja f .
Thus the vertical velocity just before he lands is
vyf = −4 32
. m s.
(a) His hang time may then be found from v v a t
yf yi y
= + :
− = + −
4 32 4 03 9 80
. . .
m s m s m s2
e jt
or t = 0 852
. s .
(b) Looking at the total horizontal displacement during the leap, x v t
xi
= becomes
2 80 0 852
. .
m s
= vxi a f
which yields vxi = 3 29
. m s .
(c) vyi = 4.03 m s . See above for proof.
(d) The takeoff angle is: θ =
F
HG
I
KJ =
F
HG
I
KJ = °
− −
tan tan
.
.
1 1 4 03
50 8
v
v
yi
xi
m s
3.29 m s
.
(e) Similarly for the deer, the upward part of the flight gives
v v a y y
yf yi y f i
2 2
2
= + −
d i:
0 2 9 80 2 50 1 20
2
= + − −
vyi . . .
m s m
2
e ja f
so vyi = 5 04
. m s.
For the downward part, v v a y y
yf yi y f i
2 2
2
= + −
d i yields vyf
2
0 2 9 80 0 700 2 50
= + − −
. . .
m s m
2
e ja f
and vyf = −5 94
. m s.
The hang time is then found as v v a t
yf yi y
= + : − = + −
5 94 5 04 9 80
. . .
m s m s m s2
e jt and
t = 1 12
. s .](https://image.slidesharecdn.com/12-solutionsserwayphysics6thedition-230806185121-ebd4e979/85/1-2-Solutions-Serway-Physics-6Th-Edition-92-320.jpg)



































































































































































































































































































































































































































![Chapter 18 535
P18.28 λG
G
v
f
= =
2 0 350
. m
a f ; λ A A
A
L
v
f
= =
2
L L L
f
f
L L
f
f
G A G
G
A
G G
G
A
− = −
F
HG I
KJ = −
F
HG I
KJ = −
F
HG I
KJ =
1 0 350 1
392
440
0 038 2
. .
m m
a f
Thus, L L
A G
= − = − =
0 038 2 0 350 0 038 2 0 312
. . . .
m m m m,
or the finger should be placed 31 2
. cm from the bridge .
L
v
f f
T
A
A A
= =
2
1
2 µ
; dL
dT
f T
A
A
=
4 µ
;
dL
L
dT
T
A
A
=
1
2
dT
T
dL
L
A
A
= =
−
=
2 2
0 600
3 82
3 84%
.
.
.
cm
35.0 cm
a f
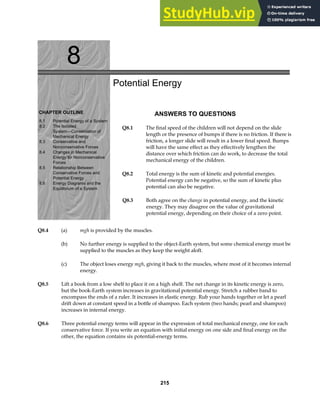
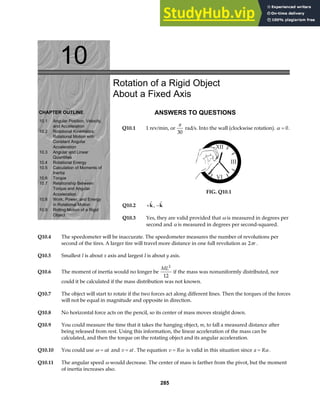
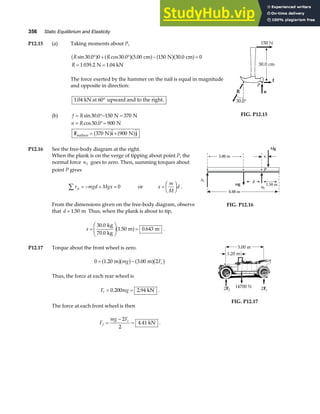
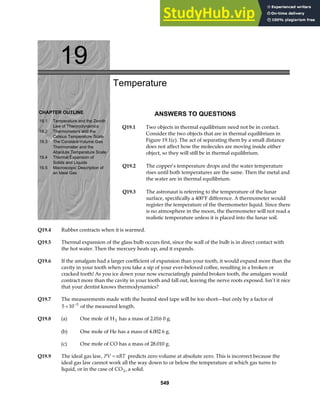
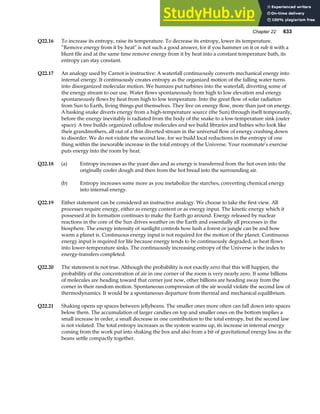
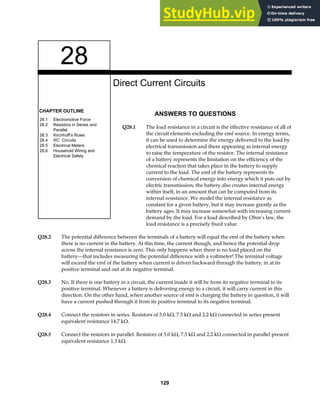
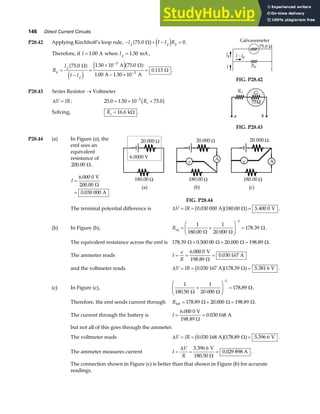
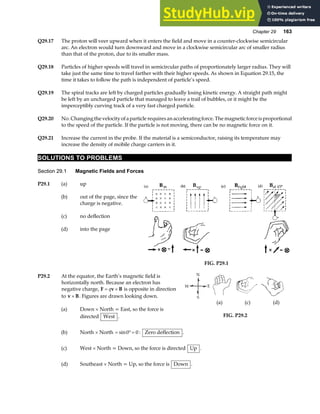
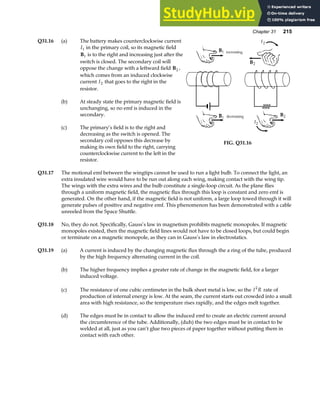
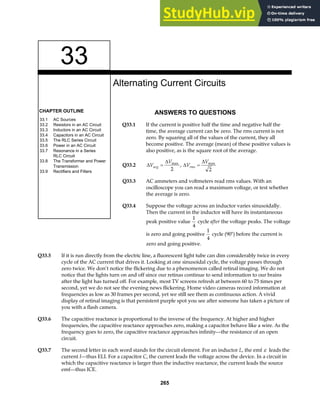
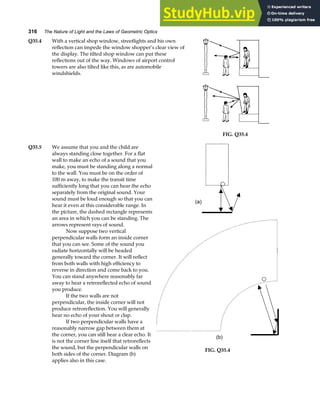
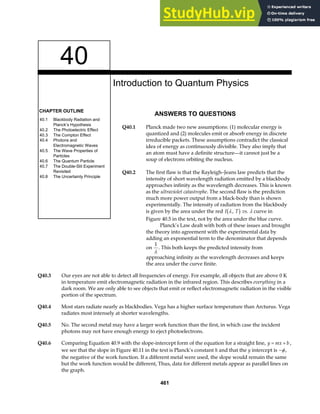
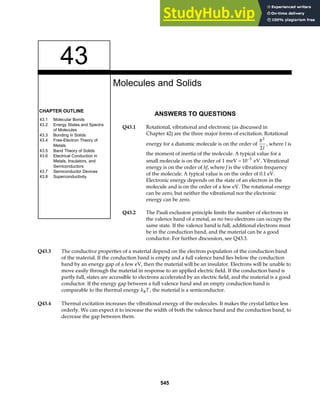
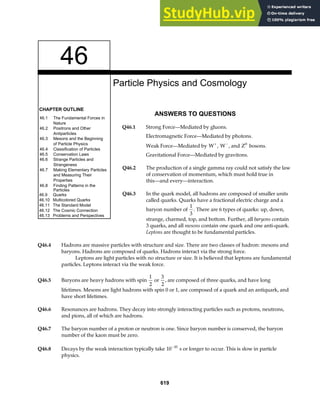
P18.29 In the fundamental mode, the string above the rod has only
two nodes, at A and B, with an anti-node halfway between A
and B. Thus,
λ
θ
2
= =
AB
L
cos
or λ
θ
=
2L
cos
.
Since the fundamental frequency is f, the wave speed in this
segment of string is
v f
Lf
= =
λ
θ
2
cos
.
Also, v
T T
m AB
TL
m
= = =
µ θ
cos
where T is the tension in this part of the string. Thus,
2Lf TL
m
cos cos
θ θ
= or
4 2 2
2
L f TL
m
cos cos
θ θ
=
and the mass of string above the rod is:
m
T
Lf
=
cosθ
4 2
[Equation 1]
L
M
θ
A
B
T
F
Mg
θ
FIG. P18.29
Now, consider the tension in the string. The light rod would rotate about point P if the string exerted
any vertical force on it. Therefore, recalling Newton’s third law, the rod must exert only a horizontal
force on the string. Consider a free-body diagram of the string segment in contact with the end of
the rod.
F T Mg T
Mg
y
∑ = − = ⇒ =
sin
sin
θ
θ
0
Then, from Equation 1, the mass of string above the rod is
m
Mg
Lf
Mg
Lf
=
F
HG I
KJ =
sin
cos
tan
θ
θ
θ
4 4
2 2
.](https://image.slidesharecdn.com/12-solutionsserwayphysics6thedition-230806185121-ebd4e979/85/1-2-Solutions-Serway-Physics-6Th-Edition-533-320.jpg)













































![Chapter 20 583
P20.17 The bullet will not melt all the ice, so its final temperature is 0°C.
Then
1
2
2
mv mc T m L
w f
+
F
HG I
KJ =
∆
bullet
where mw is the melt water mass
m
m
w
w
=
× + × ⋅° °
×
=
+
=
− −
0 500 3 00 10 240 3 00 10 30 0
3 33 10
86 4 11 5
0 294
3 2 3
5
. . . .
.
. .
.
kg m s kg 128 J kg C C
J kg
J J
333 000 J kg
g
e jb g b ga f
P20.18 (a) Q1 = heat to melt all the ice = × × = ×
−
50 0 10 3 33 10 1 67 10
3 5 4
. . .
kg J kg J
e je j
Q2
3 4
50 0 10 4186 100 2 09 10
= °
= × ⋅° ° = ×
−
heat to raise temp of ice to 100 C
kg J kg C C J
b g
e jb ga f
. .
Thus, the total heat to melt ice and raise temp to 100°C = ×
3 76 104
. J
Q3
3 6 4
10 0 10 2 26 10 2 26 10
= = × × = ×
−
heat available
as steam condenses
kg J kg J
. . .
e je j
Thus, we see that Q Q
3 1
, but Q Q Q
3 1 2
+ .
Therefore, all the ice melts but Tf °
100 C. Let us now find Tf
Q Q
T
T
f
f
cold hot
kg J kg kg J kg C C
kg J kg kg J kg C C
= −
× × + × ⋅° − °
= − × − × − × ⋅° − °
− −
− −
50 0 10 3 33 10 50 0 10 4186 0
10 0 10 2 26 10 10 0 10 4 186 100
3 5 3
3 6 3
. . .
. . .
e je j e jb gd i
e je j e jb gd i
From which, Tf = °
40 4
. C .
(b) Q1 = heat to melt all ice = ×
1 67 104
. J [See part (a)]
Q
Q
2
3 6 3
3
3
10 2 26 10 2 26 10
10 4 186 100 419
= = × = ×
=
°
= ⋅° ° =
−
−
heat given up
as steam condenses
kg J kg J
heat given up as condensed
steam cools to 0 C
kg J kg C C J
e je j
e jb ga f
. .
Note that Q Q Q
2 3 1
+ . Therefore, the final temperature will be 0°C with some ice
remaining. Let us find the mass of ice which must melt to condense the steam and cool the
condensate to 0°C.
mL Q Q
f = + = ×
2 3
3
2 68 10
. J
Thus, m =
×
×
= × =
−
2 68 10
8 04 10 8 04
3
3
.
. .
J
3.33 10 J kg
kg g
5
.
Therefore, there is 42 0
. g of ice left over .](https://image.slidesharecdn.com/12-solutionsserwayphysics6thedition-230806185121-ebd4e979/85/1-2-Solutions-Serway-Physics-6Th-Edition-581-320.jpg)














































































































































































































































































































































































































































































































































































































































































































This document contains a chapter outline and answers to questions about physics and measurement. The chapter outline lists topics like standards of length, mass and time, matter and model-building, density and atomic mass, and dimensional analysis. The answers to questions section provides explanations and calculations in response to questions about these topics. For example, it explains that atomic clocks are based on electromagnetic waves emitted by atoms, and that density varies with temperature and pressure.