практическая работа № 1. изучение факторов, влияющих на электродвижущую силу ...
л 3.4. с 2. к 1
1. Страница 2. Относительность движения
http://www.youtube.com/watch?v=5P2fD0WRO8c Относительность движения. 3мин 33 с
Движение тел можно описывать в различных системах отсчёта. С точки зрения механики
все системы отсчёта равноправны. Однако характеристики движения, такие как
траектория, перемещение, скорость, в разных системах оказываются различными.
Относительными называют величины, зависящие от выбора системы отсчёта, в которой
производится их измерение.
Например, в системе отсчёта, связанной с Землёй, то есть с точки зрения наземного
наблюдателя, груз, сброшенный с самолёта, летит по некоторой криволинейной
траектории. А в системе отсчёта, связанной с самолётом, наблюдатель (лётчик) увидит,
что груз падает по прямой.
Другой пример. В купе вагона на столике лежит яблоко. Во время отправления поезда
двух наблюдателей (пассажира и провожающего) просят ответить на вопрос: яблоко
движется или нет?
Каждый наблюдатель оценивает положение яблока по отношению к себе. Пассажир
видит, что яблоко находится на расстоянии 1 м от него и это расстояние сохраняется с
течением времени. Провожающий, который стоит на перроне, видит как с течением
времени расстояние от него до яблока увеличивается.
Пассажир отвечает, что яблоко не совершает механического движения — оно
неподвижно; провожающий говорит, что яблоко движется.
Итак, одно и то же тело одновременно движется и не движется. Возможно ли такое?
Согласно определению механического движения всё так и есть. Ведь механическим
движением называется изменение положения тела в пространстве относительно других
тел с течением времени.
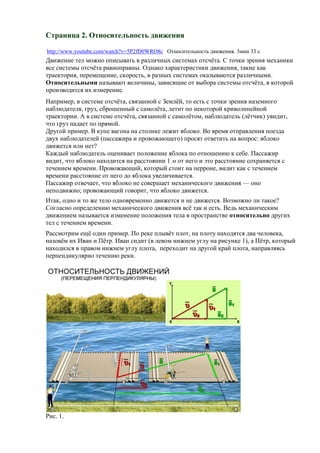
Рассмотрим ещё один пример. По реке плывёт плот, на плоту находятся два человека,
назовём их Иван и Пётр. Иван сидит (в левом нижнем углу на рисунке 1), а Пётр, который
находился в правом нижнем углу плота, переходит на другой край плота, направляясь
перпендикулярно течению реки.
Рис. 1.
2. За движением Петра следят два наблюдателя: один — неподвижный, назовём его Олег,
расположился на берегу в точке О, другой — плывущий по течению на плоту Иван (со
скоростью течения реки). Оба наблюдателя измеряют перемещение Петра и время,
затраченное на него. Схематически перемещения Петра показаны на рисунке 1. Проведём
мысленно через точку О систему координат ХОУ. Ось X направим вдоль берега, ось У —
перпендикулярно течению реки. Это неподвижная система координат. Другую систему
координат Х'О'У' свяжем с плотом. Оси X' и У' параллельны осям X и У. Это —
подвижная система координат. Как движется Пётр относительно наших двух систем?
Наблюдатель на плоту Иван, двигаясь вместе со «своей» системой координат по течению,
видит, что Пётр удаляется от него к противоположному берегу всё время
перпендикулярно течению. Относительно подвижной системы координат
(плота) Пётр совершил перемещение s1 . Разделив его на t , подвижный наблюдатель Иван
получит скорость Петра относительно плота:
s1
v1 .
t
Совсем другим представится движение Петра неподвижному наблюдателю на берегу
Олегу. Относительно «его» системы координат Пётр за то же время t совершил
перемещение s . За это же время подвижная система отсчёта вместе с плотом совершила
перемещение s 2 (Петра, как говорят, «отнесло» вниз по течению).
Правило сложения перемещений.
Из рисунка 1 видно, что перемещение s относительно неподвижной системы отсчёта
равна геометрической сумме перемещения тела относительно подвижной система отсчёта
s1 и перемещения подвижной системы отсчёта относительно неподвижной s 2 :
s = s1 + s 2 .
Правило сложения скоростей.
Скорость тела v относительно неподвижной системы отсчёта равна геометрической сумме
скорости тела относительно подвижной система отсчёта v1 и скорости подвижной системы
отсчёта относительно неподвижной v2 :
v = v1 + v2 .
Это соотношение выражает классический закон сложения скоростей.
Соответственно, различными в названных системах отсчёта являются и траектории
движения тела, и его перемещения, и пройденные пути, и состояние покоя.
Относительностью движения называют зависимость траектории, пути, перемещения и
скорости одной и той же материальной точки от выбора системы отсчёта.
Закон сложения скоростей был установлен Г. Галилеем. Он справедлив только для
движений со скоростями, намного меньшими скорости света c 3108 м/с ( v << c ). Такие
скорости в физике называют нерелятивистскими. В релятивистской механике, созданной в
начале XX века главным образом благодаря работам А. Эйнштейна, движение тел
рассматривается при скоростях, близких к скорости света. Классическая механика
Ньютона является предельным случаем релятивистской при υ << c.
Во Вселенной не обнаружены объекты, находящиеся в состоянии абсолютного покоя.
Поэтому изменение положения тел определяется по отношению к другим телам. В этом
смысле движение тела или его покой (если положение тела не изменяется) являются
относительными.
Пример решения задачи.
3. Двигатель самолёта сообщает ему скорость относительно воздуха, равную 900 км/ч. С
какой скоростью движется самолёт относительно Земли при попутном ветре, скорость
которого равна 50 км/ч; при таком же встречном ветре?
Дано:
v1 =900 км/ч
v2 =50 км/ч
v—?
Решение:
Относительно системы координат связанный с воздухом самолёт движется со скоростью
v1 =900 км/ч. Скорость самолёта относительно Земли складывается из его скорости
относительно воздуха и скорости воздуха относительно Земли v2 =50 км/ч.
v = v1 + v2 .
Рис. 1.
В случае попутного ветра (рис. 1) вектор скорости движения воздуха совпадает по
направлению с вектором скорости движения самолёта, поэтому v = v1 + v2 .
Подставив сюда приведенные в условии задачи значения v1 и v2 ,
получим: v = 900 км/ч + 50 км/ч = 950 км/ч.
В случае встречного ветра (рис. 2) вектор скорости движения воздуха противоположен по
направлению с вектором скорости движения самолёта:
Рис. 2.
Складывая векторы v1 и v2 получим, что скорость самолета:
v = v1 – v2 ,
v= 900 км/ч − 50 км/ч = 850 км/ч.
Ответ: v = 950 км/ч; v = 850 км/ч.