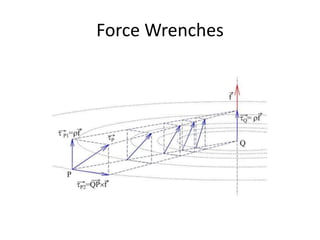
2. Force Wrenches
• Spatial loadings need to be defined to
formulate the equation of motion. Just as
twists describe motion, wrenches describe
loads.
• The combination of force and torque about a
point P defines the load wrench as
P
ff
P
4. • A force and moment combination represents a helical
field of moments around the application axis of the
force.
• Similar to a velocity twist, any force wrench is split into
two components which describe a force on a particular
line and a pure couple about that line.
• Using the concepts of the position vector to the screw
axis and the screw pitch, the two parts of a spatial
force are
0
P
f
f
fr f
5. The meaningful interpretation of the
screw coordinates
• The screw axis is the application axis of the
force. The rest of the geometrical information
contained is calculated using the moment
equation
• The force wrench has magnitude
P
r f f
f
6. The pitch of the screw
• The pitch of the screw is found by projecting
the moment equation along the screw axis as
• Which is solved as
( )T T T
P
T
f f r f f f
f f
T
P
T
f
f f
7. The closest position of the screw axis
• The closest position of the screw axis is found
by projecting on the plane
perpendicular to the screw axis as
P
r f f
( )
( )
( ) ( )
( )
f f r f f f
P
f r f
T Tf f r f r f
Tf f r
8. • which is solved for the position vector
• If a component of along the screw axis
exists then
• where is the unit direction vector
P
T
f
f f
r
P
T
u
f
u
f f
r r
T
f f
f f f
u
r
u
9. The Ambient Force Array
• The central concept of ecological mechanics is
the ambient force array at a point of
observation.
• To be an array means to have an arrangement,
and to be ambient at a point means to
surround a position in the environment that
could be occupied by an observer.
• An arrangement means that it has structure.
10. A thin rectangular plate
x
y
o
1
2
3
4
( a )
x
y
o
a
a
b
b
1
2
3
4
x
y
o
a
a
b
b
1
2
3
4
11. Case (a)
1 2 3 4
1 0 1 0
0 1 0 1
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
w w w w
x
y
o
1
2
3
4
12. Case (b)
1 2 3 4
1 0 1 0
0 1 0 1
0 0 0 0
0 0 0 0
0 0 0 0
w w w w
b a b a
x
y
o
a
a
b
b
1
2
3
4
13. When the position becomes occupied
• It contains information about the body of the
observer.
• There is also information to specify the
observer himself.
• The plate is allowed to move only on the
horizontal plane. Based on the configurations
of the pegs, determine the directions of the
unconstrained instantaneous motion.
14. The reciprocal twist motion
• A plate moving on a frictionless plane has 3
DOF.
• For case (a), 4 wrenches can only constrain the
plate in X- and Y- direction.
• It cannot constrain the rotation in Z-direction,
i.e., the reciprocal twist motion is in
0 0 0 0 0 1
T
Editor's Notes
The helical field of net moments about any point on a rigid body as a results of general loading. The net moment has two partd, TP1 which is the moment about the applicatioon axis, and TP2 the resukting tangential amomennt that represnts the force f applied at a distance.
If r perpen is assumed to lie on the plane perpendicular to f
and fT r per =0
As shown in Figure 4, a thin rectangular plate is supported on a frictionless horizontal plane (z = 0) with four circular shaped pegs arranged in configuration (a), (b) and (c). The contact between the plate and the peg is assumed frictionless point contact.
Determine the wrench (force/torque) exerted on the plate by the four pegs respectively and write the four wrenches in a 6 x 4 matrix for configuration (a), (b) and (c) respectively.