Screw kinematics
•Download as PPTX, PDF•
1 like•248 views

A special kind of mechanical event involving two detached objects and two successive displacements is an articulation, in which the first displacement causes the second. It is a superordinate event with two subordinate events.

Recommended
More Related Content
What's hot
What's hot (20)
Similar to Screw kinematics
Similar to Screw kinematics (20)
More from Wangdo Kim
More from Wangdo Kim (15)
Recently uploaded
Recently uploaded (20)
Screw kinematics
- 2. THE CAUSATION OF EVENTS • A special kind of mechanical event involving two detached objects and two successive displacements is an articulation, in which the first displacement causes the second. It is a superordinate event with two subordinate events. • Joints are modeled using unit twists. • The question of whether or not such causation could be perceived.
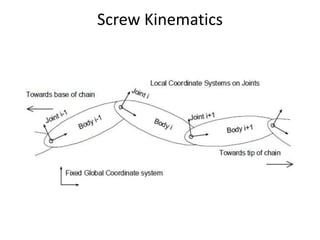
- 3. A linear chain of rigid bodies
- 4. Velocity Kinematics • Twists are used to describe the motion of rigid bodies. The relative motion twist between two joined bodies is split into two parts. • The unit twist conveys the geometrical information; whereas, the constitutive portion is the magnitude. If the joint has a single degree of freedom then it can be modeled by a screw. For example, a revolute joint is modeled by a zero pitch screw and a prismatic joint by an infinite pitch screw. The joint axis thus represented by a unit twist s. The twist magnitude represents the joint speed. rv sq & where s is a unit twist and 𝑞 is the twist magnitude
- 5. • This notation is extended to multiple degrees of freedom with multiple sequential screws, such that 1 1 2 2 ...r k k s q s q s qv & & & Where k is the number of degrees of freedom, 1 s through k s the unit twists representing each joint, and 1 q&through k q&each joint speed. Equation 1 1 2 2 ...r k k s q s q s qv & & & is compacted into r sqv & Where s is the 6 k joint matrix 1 2 ... ks s ss And q&the 1k joint speed matrix
- 6. A slider pin joint model
- 7. And q&the 1k joint speed matrix 1 2 k q q q q & & M & & Each column of s represents a base screw for the subspace of relative motions between joined bodies. A slider pin joint is modeled with the slider in the x the direction and the pin about zaxis. The individual joint axes are 1 0 0 0 0 0 x s 2 0 0 0 0 0 z s The 6x2 matrix joint space is 1 2 0 0 s s x z s
- 8. The Basis Screw • Joints are modeled as the basis screw of the relative motion between bodies. • The velocity difference between two successive bodies is proportional to the screw axis of the joint between them. • The relative acceleration between bodies contains a part along the joint axes as well as bias acceleration in other direction.
- 9. The knee joint connects femur to tibia 1i i i i s qv v &
- 10. Acceleration Kinematics The acceleration kinematics are defined by substituting 1i i i i s qv v &into v t a for each body i The change of the velocity twist with time is the spatial acceleration. 1 1 1 ( ) ( ) i i i i i i i i i i i i i v t v s q t a s q t s a s q q t a & & && &
- 11. where i a and 1i a are the spatial accelerations of bodies i and i-1. i s is the joint axis, iq&the joint speed, and iq&&the joint acceleration. In order to calculate the rate of change of i s the joint axis is expanded from 0P r v into i e r e s e Where is the joint axis pitch, e is its direction, and r its location. It is known from [1] 1. Featherstone, R. Robot dynamics algorithms. Kluwer: 1987. The rate of change of any vector e fixed to a moving rigid body is e e t
- 12. The rate of change of the joint axis ( ) ( ) ( ) ( ) 0 i e r es et t e r e t t e t r e r e e t e v e r e e
- 13. Which is generalized as i i s v s t Where v is the velocity twist And v is the spatial cross product operator. 0 v v Let joint i connect body i to body i-1, then the accelerations are related by 1i i i i i i ia a s q v s q && & The bias acceleration term i i iv s q &is the convective acceleration of the joint is .
Editor's Notes
- On each body i there is a local coordinate system i and a joint that connects the body with its proximal body i-1. A linear chain of rigid bodies represents the basic multibody case. For each body I there isd s local cooridnate systema nd a joint that connects that body with its poroximak body i-1.
- Vi and v1-1 are the velocity twists of bodies I and i-1, si the joint axisd and qdot I is thre joint speed.