

Recommended
More Related Content
What's hot
What's hot (20)
Viewers also liked
Viewers also liked (20)
Similar to Screw
Similar to Screw (20)
More from Wangdo Kim
More from Wangdo Kim (15)
Recently uploaded
Recently uploaded (20)
Screw
- 1. Screw
- 2. The principle of duality • This study in projective geometry reveals that the principle of duality applies to the screw. • Here, the screw is demonstrated to be an element of a projective three-dimensional space (P3), right alongside the line. • Dual elements for the screw and line are also revealed (the nut and spline). • Reciprocity is demonstrated for a pair of screws, and incidence is demonstrated for screw and its dual element. Reciprocity and incidence are invariant for projective transformations of P3, but only incidence is invariant for the more general linear transformations of screws.
- 3. ‘‘A screw is a screw is a screw.’’ • The screw is an ingenious and useful element of three- dimensional space. You can use it to model the general infinitesimal displacement of a rigid body, or you can use it to model the general loading exerted on a body. • One body twists relative to another body on a screw. A body applies a wrench to another body along a screw. • One of the most appealing things here is that the screw handles all cases of instantaneous displacement and all cases of loading, all under one umbrella. • Screws of zero pitch are lines, which are used to model pure rotations and pure forces. Screws of infinite pitch (or of zero pitch on lines at infinity) are used to model pure translations and pure couples. • The screw therefore has been poised for more than 100 years to unify the sciences of kinematics and statics.
- 4. Featherstone’s Vampire The lack of duality The concept of “aggregate” Griffis M, Rico JM. 2003. The nut in screw theory. Journal of Robotic Systems 20:437-47 6. Plücker J, Klein F. 1868. Neue geometrie des raumes gegründet auf die betrachtung der geraden linie als raumelement Erste-[zweite] Abtheilung. In. Leipzig: B. G. Teubner.
- 6. Velocity Twist describes dynamics with physically meaningful quantities
- 7. The velocity twist of a rigid body expressed at a point P P P v v Where v P is the linear velocity vector of the body expressed at P and the angular velocity of the rigid body.
- 8. The information in the array • This vector combination conveys enough information to describe the motion as a simultaneous rotation and translation ab out an axis in space. • The instantaneous path followed by any point on the rigid body through time is a helical (or helicoidal) curve.
- 9. The screw pitch By definition, the linear vector Q v of any point Q lying on the twist axis is parallel to the angular velocity . The screw pitch is defined by Q v The pitch is the scalar factor between the linear velocity Q v and the angular velocity vector .
- 10. The linear velocity vector at reference point P is P rv Where ris the position vector from point P to point Q.
- 11. The Spatial Velocity is split into two parts 0P r v which represents a rotation of about an axis located by r and a translation parallel to the axis of
- 12. The geometrical information The geometrical information in P v is a screw axis located by rin the direction of and the pitch, , which has units of length representing the translation along the axis per revolution. A pitch of zero indicates a purely rotational motion and an infinite pitch indicates a purely translational motion.
- 13. A line vector and a free vector 0P r v The first part is associated with a line vector since it contains the orientation and location of the screw axis. The second part is associated with a free vector because its components are independent to the reference point.
- 14. Screw Two
- 15. Acceleration Twists • Rigid body accelerations do not form helical ve ctor fields. The reason is that the linear acceler ation of any point on a rigid body contains vel ocity related terms. • This is called the material acceleration and it is the total derivative of the velocity vector such t hat • m d v dt a
- 16. The local acceleration • Assuming the velocity is a function of po sition and time, then the mate rial acceleration is split into two parts • The local acceleration is defined by ( , )v v p t m v v dp t p dt v a v p a v t a
- 17. A small change in the position vector changes the velocity vector • The change of the velocity vector while holding everyt hing constant and changing the position of the referen ce point is calculated from the velocity vector expansio n • Using the position vector of the screw axis and the po sition of the reference point, then v r r q p
- 18. ( , ) ( , ) [ ( ) ] [ ( ) ] v v p p t v p t q p p q p p p Therefore v p A small change in the position vector ch anges the velocity vector as
- 19. The material acceleration • To relate the material acceleration with t he local acceleration for a rigid body rot ating simplifies to • For particles and rigid bodies, forces thro ugh the center of mass and material acc elerations are related by a scalar mass su ch that m a va mF ma
- 20. The linear equation of motion • The linear equation of motion becomes • The local vector acceleration does form a helical vector field and can be represente d by a screw quantity. Together with the angular acceleration vector they form th e spatial acceleration. F ma mv
- 21. Spatial acceleration • The acceleration twist of a rigid body ex pressed at a point P is • The acceleration is also a screw quantity and can be split into two parts P P a a 0 r ha
- 22. The spatial acceleration vs. the material acceleration • By definition, the spatial acceleration me asures a different quantity from the mate rial acceleration. • The material acceleration measures the a cceleration of a particular point on the ri gid body, while spatial acceleration meas ures the acceleration state of the entire ri gid body at a fixed location in space.
- 23. Material acceleration of a constant spinning disk
- 24. Spatial acceleration of a constant spinning disk is zero
- 25. The distinction • The distinction between measuring a par ticular point on a body, and measuring t he entire body at a particular location is crucial to the understanding of screw the ory. • The velocity twist is a function of positio n, orientation, and time. The change with time is the spatial acceleration v t a
- 26. An infinitesimal screw motion • The change of position and orientation is expressed through an infinitesimal screw motion p
- 27. If the reference frame is moving • If the reference frame is moving along wi th the body then • The total derivative of the velocity twist i s then split in two parts v t dv v v d tdt dt va v
- 28. 6×6 matrix • Also, since the angular velocity vector do es not change with position v v pv p v p 0 p
- 29. Change of any arbitrary vector A with an infinitesimal rotation • If the vector is fixed and the reference fr ame changes then the apparent change i n is A A A A A A
- 30. • Finally, assembling all the partials togeth er in spatial form Applying substituting vandfor Ayields v v 0 ( )T v v v
- 31. The spatial cross product operator v× • Simplifies 0 v v dv v v d tdt dt va v ( )dv Ta v v dt
- 32. in component form v a vd dt m a va
Editor's Notes
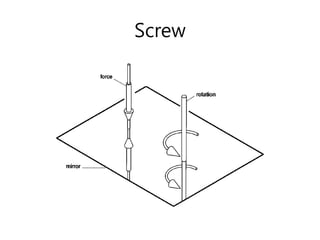
- The concept of “aggregate” was used to identify the lines as how it corresponds with the linear range of points and to identify the splines as how it corresponds with the pencil of planes. In the mirroe, the points trade position (reflect) along the line, but the planes of the pencil do not. The force and rotation are therefore dual and do not represent the same thing.
- The connection between projective geometry and dynamics with screw theory. Projective geometry uses subspace decomposition and projections to extract useful information from problem. Similarly in dynamics, to find the reaction forces on all the joints, the splitting of all the internal forces into active and reactive subspace is required. The plethora of methods and formulations for rigid body dynamics may confuse prospective students. Of importance is not the mathematics behind the formulations but the physical insight they may offer. One of these methods which describes dynamics with physically meaningful quantities is screw theory.
- The total differential D/Dt is known as the material or substantial derivative with respect to time. The first term ¶/¶t in the right hand side of is known as temporal or local derivative which expresses the rate of change with time, at a fixed position. The last three terms in the right hand side of are together known as convective derivative which represents the time rate of change due to change in position in the field.
- The position vectro of the screw axis is q and the position pf the refrence point is p Then r=q-p
- Where wxv is called the convective acceleration. Where F is the net force vector, m is the mass, and a^m is the material linear acceleration of the center of mass.
- Whem local acceleration is used, a convective force must be introduced into the equation of motion to compensate for the difference. Where a is the local linear acceleration vector, w is the angular velocity of the body and v is the linear velocity vector.
- Where aP is the local acceleration vector of the body expressed at P and alpa the angular acceleration of the rigid body. With alpa the angular accel vec, r a position vec to the screw axis and h its pitch.
- Has a centripetal component since the rigid body at P follows a circular path. The acceleration of the particles on the disk under P follows a circular motion and therefore expereince a velocity related centripetal accel. Said otherwise, the linera velocity vec of that particle changes direction with time qand thus it experiences accel. On the other hand,
- The linear velocity vec of the rigid body unbder P is constant, if the measuring point P is fixed in space and it does not move with the rigid body. The spatial accelration id then zero since the vel state of the rigid bosy is constant.
- Which is the spatial form of (1.15).
- Where delta p is the change of the location of the reference point and del theta is the change of the orientation of the reference coordinate frame.
- Which is the spatial form of (1.14)
- The partial of v with respect to sigma is a 6*6 matrix indicating how each of the comnponents of v change as the reference coordinate frame changes with components
- For the changes with orientation we defined the change of any arbitrary vector A with an infinitesimal rotation delta psi as
- Where v* is the spatial cross product operator
- Which is the spatial version of the