The principal screw of inertia two
•Download as PPTX, PDF•
1 like•179 views

When a point of observation is occupied, there is also information to Specify the observer himself, and this information cannot be shared by other observers. "Axis of percussion" defines the application line for a force that rotationally accelerates a free body about "Specific Point".

Recommended
Recommended
More Related Content
What's hot
What's hot (20)
Viewers also liked
Similar to The principal screw of inertia two
Similar to The principal screw of inertia two (20)
More from Wangdo Kim
More from Wangdo Kim (15)
Recently uploaded
Recently uploaded (20)
The principal screw of inertia two
- 1. The principal screw of inertia TWO
- 2. Mapping of an exterior point P to a line L through a conic C
- 3. Inertia Mappings and Decomposition • In projective geometry a conic section C maps P into lines L=CP. • In dynamics an inertia matrix I maps acceleration twists a into force wrenches f=Ia as if the body is at rest and v=0. • The process is identical, except the inertia matrix I is usually positive definite, and always positive semi-definite.
- 4. A positive definite matrix • One intuitive definition is as follows. Multiply any vector with a positive definite matrix. The angle between the original vector and the resultant vector will always be less than π/2. The positive definite matrix tries to keep the vector within a certain half space containing the vector. This is analogous to what a positive number does to a real variable. Multiply it and it only stretches or contracts the number but never reflects it about the origin.
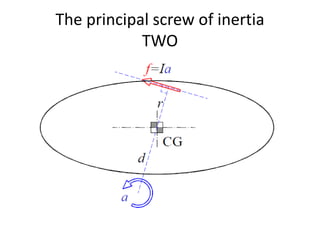
- 5. Inertia mappings • Inertia mappings define a unique force f=Ia for every acceleration a. The acceleration a also defines a point in homogeneous coordinates called the pole of a. The force f defines a line in homogeneous coordinates called the polar of f. The point uniquely maps to the line using the inertia matrix. In dynamics, the polar f is called the axis of percussion for the pole of a. • A simple planar example demonstrates how to locate the axis of percussion. A coordinate frame is placed at the acceleration pole a and with the local x-axis along the line that connects a and the center of gravity.
- 6. Inertia maps acceleration into forces
- 7. The inertia matrix • If a body has mass m, radius of gyration , and the center of gravity is at distance d then the inertia matrix is • Accelerations are points and forces are lines on the plane. The line is the axis of percussion of the point. 2 2 0 0 0 0 ( ) m I m dm dm m d
- 8. • and the force required is The force f needed to accelerate the body about a is f=Ia if the body is at rest. If the angular acceleration is then the acceleration twist is 0 0a 2 2 0 ( ) f md m d
- 9. Axis of percussion Obviously f has no x-axis component and its axis of application is located by normalizing the force wrench. Dividing the wrench by its magnitude md yields the shortest distance l of the application axis as 2 l d d
- 10. • The force lies on the so-called “axis of percussion.” This axis defines the application line for a force that rotationally accelerates a free body about a specified point. In the world of sports, the effect of the axis of percussion is called the “sweet spot;” where all of the energy of the athlete is transferred most effectively to the ball. In this case, the rotation caused by f occurs about a. The minimum distance r of the axis of percussion to the center of gravity is 2 r l d d
- 12. Sport Engineering • A ball hitting a baseball bat at the center of percussion creates negligible translation at another point inside the region where the bat is gripped. • The linear impulsive force imparted to the grip is minimized so that the sensation of “sting (touch)” is reduced. • Given the center of mass and an expected center of impact (sweet spot), a baseball bat (or a tennis racket, golf club, sledge hammer, etc.) is designed so that the area of grip is centered around the pole.
- 13. Where is the radius of gyration of the rigid body and d the distance from a to the center of gravity. The farther away a is, the closer f is and vice versa. There are two limiting cases with d=0 or d=. In the first case, an acceleration twist about the center of gravity needs a force wrench at infinity which represents a pure couple, and in the second case, an acceleration twist at infinity which represents a pure translation needs a force wrench through the center of gravity.
- 14. Mappings in power relations
- 15. Mapping in power relations • It demonstrates mapping in power relations. • A powerless force f passes through the rigid body velocity v such that • If f represents a force applied on a single rigid body, it relates this fore to an acceleration a such that 0T v f ( )T f Ia v Iv
- 16. The power relationship • The power relationship expands to • where • is the momentum wrench. ( ) ( ) 0 T T T T T T v f v Ia v v Iv Iv a p a p Iv
- 17. • In fact, in general the power is defined as • since both calculations are equivalent. • A reaction force f that produces no power has an application axis that passes through the instant center of motion v. T T P v f p a
- 18. Powerless acceleration • Equivalently the resulting acceleration a lies on the application axis of the momentum h. • Powerless forces define reaction forces, and powerless acceleration define reactive accelerations. • This equivalency is used to decompose forces and acceleration according to reactive and active components. • Mapping in power relationships are very important because the intertwines forces, velocities, accelerations, and momenta.
- 19. Meaningful Information • In dynamics it is always meaningful to classify quantities in terms of power. • Reaction forces are wrenches that provide zero power. • The subspace are defined according to their power relation. • With mappings these power relations help define subspace for any wrench or twist.
Editor's Notes
- In projective geometry a conic section C maps P into lines L=CP. This oner-to-one mapping defines geometrically using the grpahical rpresnetaion of conic sections. A unique one-to-oen mapping
- Inertia maps acceleration into forces. Accelerations are points and forces are lines on the plane. The line is the axis of percussion of the point.
- A powerless force f passes through the veclocity v, or s powerless accelration a lies on the line of action of the momentum p.